Аннотация
В.Р. Губерна, А.В. Захаров, Д.В. Бажутин Ускоренное прототипирование систем автоматизированного электропривода на базе платформы Arduino.
В статье описываются возможности использования технологии Rapid Control Prototyping в сочетании с микроконтроллером Arduino. Рассмотрена методика автоматического генерирования программного кода из среды Matlab/Simulink и процесс обмена данными в режиме реального времени.
Быстрое прототипирование систем управления применяется для ускорения отладки программного обеспечения на реальном объекте управления. На персональном компьютере моделируется программное обеспечение электронного блока управления и в реальном времени происходит обмен информацией с объектом управления, выполненным натурно (полунатурное моделирование).
С этим видом моделирования также тесно связано такое понятие как модельно-ориентированное программирование. В этом случае программа одновременно является и моделью, обычно визуальной, представленной в виде блоков-подпрограмм. На рисунке 1 представлена блок-схема системы прототипирования.
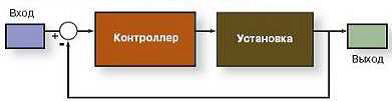
Рисунок 1 – Блок-схема системы управления
Для реализации методов полунатурного моделирования и быстрого прототипирования управления удобно использовать среду Simulink.
Как только цифровые технологии начали быстро развиваться, исследователи предложили различные методы для проектирования, разработки, внедрения и тестирования цифровых систем управления. Процесс тестирования, называемый Processor in the Loop, позволяет разработчикам проверить фактический алгоритм управления в процессоре, который управляет виртуальным прототипом объекта.
PIL-моделирование может обнаруживать и анализировать потенциальные проблемы, связанные с многопоточным выполнением алгоритмов управления, в том числе вычислительных ошибок.
Цель PIL-тестирования – убедиться, что код, генерируемый из модели, будет корректно работать на фактическом процессоре, который будет использоваться в конечной целевой системе. Перед тестированием PIL-алгоритмы управления разрабатываются без учета особенностей системы реализации. PIL используется для проверки кода, который генерируется из модели контроллера (с помощью встроенного интерпретатора в данном случае), так как она составлена для конкретного целевого процессора.
На рисунке 2 представлена электрическая схема прототипа системы управления двигателем постоянного тока, на которой изображено наборное поле, контроллер Arduino Due, кнопки управления Пуск
, Стоп
, Реверс
и индикация режимов. ШИМ-выход подключен к двигателю через преобразователь, который работает от источника питания(батареи).
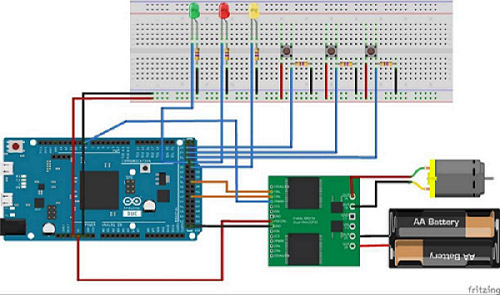
Рисунок 2 – Макет электрической схемы прототипа
На рисунке 3 представлена дискретная модель системы подчиненного регулирования скорости ДПТ в среде Simulink с задатчиком интенсивности, с 3-мя цифровыми входами и ШИМ-выходом из библиотеки для Arduino. Основная задача – смоделировать дискретную модель системы подчиненного регулирования скорости двигателя постоянного тока с независимым возбуждением, для которой разрабатывается алгоритма управления. В результате такого взаимодействия возможно получить графики переходных процессов любого промежуточного сигнала в нашей модели.
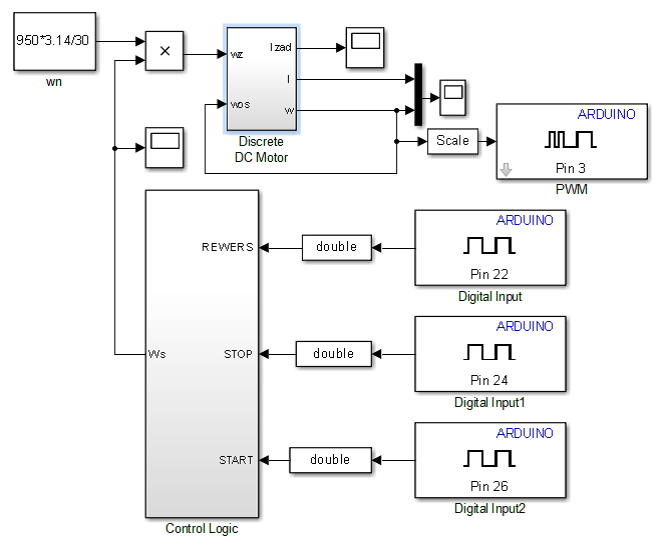
Рисунок 3 – Структурная схема прототипа
На рисунке 4 изображены результаты моделирования. На графиках видно, что система работает с двумя интервалами дискретности. Больший из них является особенностью метода обмена данными между контроллером и средой Simulink.
Выводы
Технология быстрого прототипирования управления позволяет упростить разработку ПО встраиваемых систем, сократить время на этот процесс. Существующие программные средства позволяют понизить требования к квалификации разработчика. Графическое представление программы при модельно-ориентированном программировании и автоматическое генерирование кода избавляют разработчика от составления блок-схемы алгоритма, написания программного кода и его отладки. Повышается надежность кода, так как стандартные операции и алгоритмы разработаны и отлажены поставщиком среды. Технология Rapid Control Prototyping позволяет тестировать прототипы электронных компонентов в реальном времени с помощью модельного окружения, уменьшая необходимость проведения дорогостоящих или разрушающих испытаний.
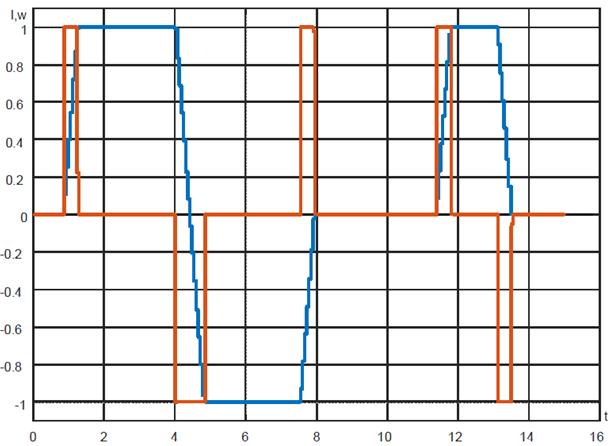
Рисунок 4 – Результаты моделирования
Список использованной литературы
1. Майк Дикенс Ускоренное прототипирование и полунатурное моделирование [Электронный ресурс]. Режим доступа: http://controlengrussia.com/programmnye-sredstva/uskorennoe-prototipirovanie-i-polunaturnoe-modelirov/
2. Rapid Control Prototyping [Электронный ресурс]. Режим доступа: http://www.irt.rwth-aachen.de/29/methoden/simulation-dynamischer-systeme-rapid-control-prototyping/rapid-control-prototyping/
3. Processor-in-the-loop [Электронный ресурс]. Режим доступа: https://www.plexim.com/plecs/pil
4. R. Liu, A. Monti, G. Francis, R. Burgos, F. Wang, D. Boroyevich. Implementing a Processor-in-the-loop with a Universal Controller in the Virtual Test Bed / 2007 IEEE Power Electronics Specialists Conference, P. 945 – 950.