Аннотация
Степаненко С. В., Meister E., Шевченко О. Г. Использование последовательного периферийного интерфейса (SPI) для связи процессора и внешних устройств.
В данной статье для связи процессора и внешних устройств использовался последовательный периферийный интерфейс (SPI).
Основной задачей проектов Symbrion, Replicator, в которых я принимаю участие в ходе научного сотрудничества со Штутгартским университетом, является исследование и разработка принципов адаптации и эволюции роботехнических организмов, состоящих из большого количества отдельных роботов, которые могут соединяться друг с другом, делиться энергией и вычислительными ресурсами. Такие организмы могут динамически перестраивать свою структуру, определяя наиболее подходящую в данный момент форму и взаимодействовать с окружающим миром при помощи датчиков и исполнительных механизмов. Модель эволюционирования таких коллективов роботов обеспечивает их конфигурирование, масштабируемость и приспособление к условиям окружающей среды без участия человека. При этом возможно самостоятельное перепрограммирование роботов с получением новой, непредусмотренной заранее функциональности [1].
При разработке различных устройств обязательно возникает проблема передачи информации между центральным процессором и периферией. Под периферией можно понимать как дополнительные процессоры, так и различные внешние устройства, например карты памяти.
В разрабатываемых роботах центральным процессором был выбран процессор семейства ADI Blackfin, два ядра которого предоставляют достаточную производительность для обработки всей поступающей информации и в то же время динамическое управление энергопотреблением позволяет экономить заряд аккумуляторов, когда большой вычислительной мощности не требуется. Периферией в данном случае оказались:
- процессор архитектуры ARM9, управляющий исполнительными механизмами;
- микроконтроллер MSP430, получающий информацию с датчиков;
- карта памяти SD.
Одним из интерфейсов, который может использоваться для этой цели, является последовательный периферийный интерфейс (англ. Serial Peripheral Interface – SPI).
В ходе научного сотрудничества со Штутгартским университетом была поставлена задача исследовать целесообразность использования SPI как основного интерфейса обмена информацией между внутренними устройствами робота.
SPI – популярный интерфейс для последовательного обмена данными между микросхемами. Интерфейс SPI, наряду с I2C (Inter-Integrated Circuit — последовательная шина данных), относится к самым широко-используемым интерфейсам для соединения микросхем. Изначально он был придуман компанией Motorola, а в настоящее время используется в продукции многих производителей. Его наименование является аббревиатурой от Serial Peripheral Interface Bus
, что отражает его предназначение – шина для подключения внешних устройств. Шина SPI организована по принципу ведущий-подчиненный
. SPI также иногда называют четырехпроводным (англ. four-wire) интерфейсом [2].
В отличие от стандартного последовательного порта (англ. standard serial port), SPI является синхронным интерфейсом, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым ведущим устройством (процессором). Принимающая периферия (ведомая) синхронизирует получение битовой последовательности с тактовым сигналом. К одному последовательному периферийному интерфейсу ведущего устройства-микросхемы может присоединяться несколько микросхем. Ведущее устройство выбирает ведомое для передачи, активируя сигнал выбор кристалла
(англ. chip select) на ведомой микросхеме. Периферия, не выбранная процессором, не принимает участия в передаче по SPI.
В SPI используются четыре цифровых сигнала [3]:
- MOSI или SI – выход ведущего, вход ведомого (англ. Master Out Slave In). Служит для передачи данных от ведущего устройства ведомому.
- MISO или SO – вход ведущего, выход ведомого (англ. Master In Slave Out). Служит для передачи данных от ведомого устройства ведущему.
- SCLK или SCK – последовательный тактовый сигнал (англ. Serial CLocK). Служит для передачи тактового сигнала для ведомых устройств.
- ~CS или ~SS – выбор микросхемы, выбор ведомого (англ. Chip or Slave Select).
Самое простое подключение, в котором участвуют только две микросхемы, показано на рисунке 1. Здесь, ведущий передает данные по линии MOSI синхронно со сгенерированным им же сигналом SCLK, а подчиненный захватывает переданные биты данных по определенным фронтам принятого сигнала синхронизации. Одновременно с этим подчиненный отправляет свою посылку данных. Чтобы подчиненная ИС принимала и передавала данные, помимо наличия сигнала синхронизации, необходимо также, чтобы линия SS была переведена в низкое состояние. В противном случае, подчиненная ИС будет неактивна [4].
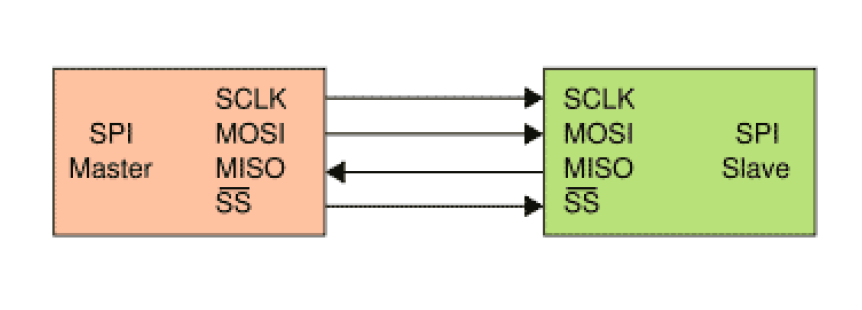
Рисунок 1 – Простейшее подключение к шине SPI
В ходе исследований были разработаны подпрограммы работы с файловыми системами класса FAT на картах памяти типов MMC и SD (включая также карты нового типа высокой емкости – SDHC). Данные подпрограммы предназначены для работы на процессоре архитектуры ARM под управлением операционной системы реального времени SymbricatorOS. Эффективность использования SPI доказана возможностью работы с картами памяти на любой частоте, вплоть до верхнего предела рабочей частоты карты в 25 МГц [5].
Как уже говорилось, центральным процессором в роботе будет процессор семейства ADI Blackfin. Данные процессоры также имеют интерфейс SPI, но могут работать только в качестве ведущих устройств. При этом к процессору можно подключить до 8 ведомых устройств, выбор устройства осуществляется низким уровнем на соответствующем выводе ~SS (~CS) [6]. Пример параллельного подключения устройств показан на рисунке 2.
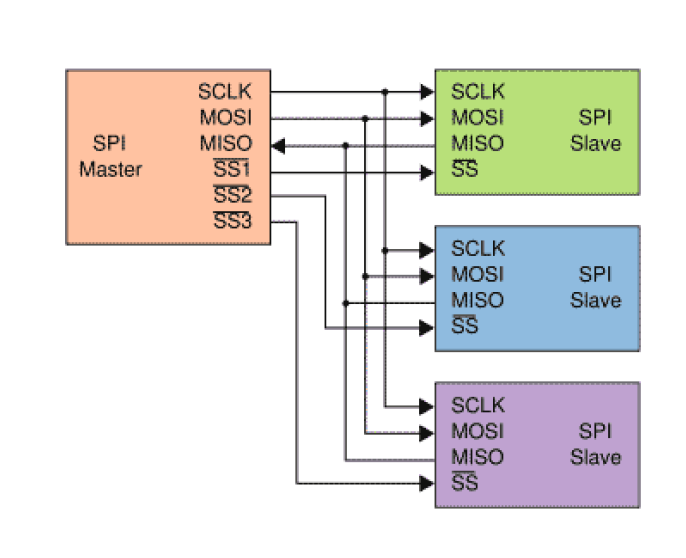
Рисунок 2 – Параллельное подключение устройств к шине SPI
Процессоры семейства Blackfin работают с операционной системой μClinux (от англ. MicroController Linux) – Linux-подобной встраиваемой операционной системой для микроконтроллеров, не имеющих блока управления памятью [7].
Была протестирована работа с картами памяти по шине SPI и на этом процессоре. К преимуществам можно отнести простоту управления картами памяти в режиме SPI.
Также исследовалась возможность передачи информации между несколькими устройствами: процессорами Blackfin (ведущий), ARM (ведомый), MSP (ведомый), карта памяти (ведомая).
После всех исследований стало возможным более полно определить достоинства и недостатки интерфейса SPI по сравнению с другими интерфейсами, которые можно использовать для тех же целей (например I2C — Inter-Integrated Circuit, CAN — Controller-area network, RS-232 и другие).
Преимущества:
- Полная дуплексная связь
- Значительно более высокая пропускная способность (до 50 Мбит/с [3]), чем у I2C (максимум 4,3 Мбит/с [8]) или SMBus (10 – 100 кбит/с [9] )
- Гибкость протокола для передачи битов
- Не ограничивается 8-разрядными словами
- Произвольный выбор размера сообщений, содержания и цели
- Чрезвычайно простой аппаратный интерфейс
- Потребление меньшего количества электроэнергии, чем необходимо для I2C или SMBus благодаря отсутствию нагрузочных резисторов, обязательных для I2C или SMBus [8,9]
- Нет конфликтных ситуаций общего доступа к шине и связанных с ними режимов обнаружения ошибок
- Ведомые устройства используют сигнал синхронизации ведущего, и поэтому не нужна высокая точность синхронизации
- Ведомым устройствам не нужен уникальный адрес – в отличие от I2C, GPIB или SCSI
- Не нужны приемопередатчики
- Используется намного меньше выводов микросхем, контактов в разъемах и кабелей, чем параллельные интерфейсы, где необходим минимум 1 провод на бит
- Используется всего один
уникальный
сигнал на устройство (выбор кристалла); остальные являются общими - Сигналы однонаправлены, позволяющие легко реализовать гальваническую развязку
Недостатки:
- Требуется больше выводов микросхем (3+n, где n – количество ведомых устройств [4]), чем I2C (всегда достаточно двух выводов [8])
- Нет адресации по общим сигналам: необходим уникальный сигнал
выбор кристалла
- Нет аппаратного управления потоком
- Нет аппаратного подтверждения приема от ведомого устройства
- Поддерживается только одно ведущее устройство
- Нет официального стандарта
- Передача только на короткие расстояния по сравнению с RS-232, RS-485 или CAN-BUS
После анализа недостатков стало ясно, что для поставленной задачи – связи процессора и периферийных устройств робота, интерфейс SPI подходит больше остальных, т.к. он
- обладает наивысшей скоростью передачи данных,
- потребляет меньшее количество энергии,
- является единственным интерфейсом из рассмотренных, который поддерживают SD/MMC карты памяти.
Было принято решение в дальнейшей разработке проекта для внутренней коммуникации использовать именно интерфейс SPI.
Список использованной литературы
- SYMBRION REPLICATOR [Электронный ресурс]. – Режим доступа: http://www.symbrion.eu/tiki-index.php?page=homepage
- SPI – PICmicro Serial Peripheral Interface [Электронный ресурс]. – Режим доступа: http://ww1.microchip.com/downloads/en/DeviceDoc/spi.pdf
- Serial Peripheral Interface [Электронный ресурс]. – Режим доступа: http://ru.wikipedia.org/wiki/Serial_Peripheral_Interface
- Последовательный интерфейс SPI [Электронный ресурс]. – Режим доступа: http://www.gaw.ru/html.cgi/txt/interface/spi/index.htm
- JEDEC MMC 4.4 Standard Pg.7 [Электронный ресурс]: 2008. – Режим доступа: http://www.jedec.org/download/search/JESD84-A44.pdf
- ADSP-BF561: Blackfin Symmetric Multi-Processor for Consumer Multimedia [Электронный ресурс]: 2009. – Режим доступа: http://www.analog.com/static/imported-files/data_sheets/ADSP-BF561.pdf
- Open Source Software on the Blackfin Processor [Электронный ресурс]. – Режим доступа: http://docs.blackfin.uclinux.org/doku.php
- I2C Bus Interfacing and Tools [Электронный ресурс]. – Режим доступа: http://www.i2cbus.com/
- System Management Bus (SMBus) Specification, version 2 [Электронный ресурс]. – Режим доступа: http://www.smbus.org/specs/smbus20.pdf