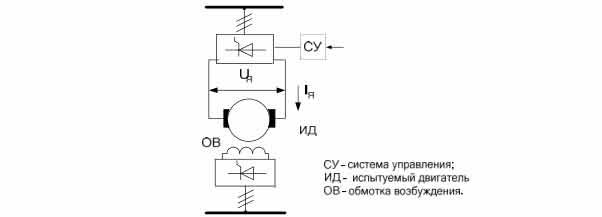
Рисунок 1 – Система нагружения с преобразователем напряжения
Авторы: ассист., Козак О.А.
Источник: http://www.kdu.edu.ua/statti/Tezi/Tezi_EES_%20pdf/349.PDF
Кременчугский государственный университет имени Михаила Остроградского
E-mail: Kozachka1987@mail.ru
Введение. Электрические машины, которые входят в состав электроприводов, являются неотъемлемой частью большинства технологических механизмов любой области промышленности. Рост количества повторных отказов электрических машин, которые после ремонта вернулись в технологический процесс, объективно указывает на необходимость определения нового паспорта отремонтированной электрической машины и на составление рекомендаций по дальнейшему ее использованию. Такие рекомендации могут быть составлены в ходе послеремонтных испытаний с реализацией нагрузки, отвечающей конкретному технологическому процессу.
Существующие в электроремонтных цехах системы испытания имеют ряд существенных недостатков: несоответствие испытаний реальным эксплуатационным условиям, длительность подготовки испытаний, их дороговизна и т.п., что объективно обуславливает применение для испытаний систем динамического нагружения [3].
Цель работы. Анализ особенностей влияния систем динамического нагружения на питающую сеть.
Материалы и результаты исследований. Реализация систем динамического нагружения может быть осуществлена с использованием управляемых преобразователей напряжения в якорных цепях и цепях возбуждения. В качестве преобразователей традиционно используют полупроводниковые малоинерционные тиристорные или транзисторные преобразователи напряжения. При использовании таких преобразовательных приборов их КПД достаточно велик, что позволяет, в отличие от систем Г-Д, сократить потребление энергии и снизить потери в преобразовательном агрегате [2]. Однако такое существенное преимущество необходимо оценивать с учетом негативных особенностей полупроводниковых преобразователей. Такие явления имеют место как внутри электропривода, в результате влияния формы напряжения и его импульсного характера на коммутационные процессы и на работу двигателя постоянного тока в целом, что снижает достоверность результатов проведенных испытаний, так и в системе электроснабжения, в результате дискретного принципа управления преобразователями, несинусоидальности напряжения и токов, которые вызывают сдвиг потребляемого из сети тока и искажение его формы. Возникающие при этом реактивные токи, протекая по сопротивлениям питающей сети, вызывают дополнительные потери активной мощности, а высшие гармоники при увеличении мощности испытуемых двигателей вызывают недопустимые искажения напряжения сети, нарушающие нормальную работу других потребителей. Мощность питающей сети в электроремонтных цехах не превышает 5000 кВА. Это свидетельствует о том, что применение схем с преобразователями напряжения делает невозможным испытания двигателей большой мощности, так как мощность преобразователя в таком случае будет соизмеримой с мощностью питающей сети, что в свою очередь приводит к недопустимым искажениям напряжения сети.
Применение конденсаторных батарей для компенсации реактивной мощности из-за резонансных явлений, вызванных высшими гармониками тока, приводит к быстрому выходу из строя конденсаторных батарей. Это обуславливает применение фильтро-компенсирующих устройств (ФКУ), настроенных на компенсацию высших гармоник. Управление ФКУ требует наличия еще одного преобразователя, который может превышать мощность основного в несколько раз [2].
Рисунок 1 – Система нагружения с преобразователем напряжения
Для снижения отмеченных недостатков целесообразно использовать для систем нагружения схемы на базе Г-Д с приводным двигателем. Такой вариант обеспечивает постоянное напряжение на выходе генератора без пульсаций, что значительно улучшает коммутационные процессы при проведении испытаний. Формирование режимов нагружения в таких схемах возможно путем управления дополнительным сопротивлением обмотки возбуждения генератора с любым типом возбуждения.
Однако системы нагружения по схеме ПД-Г-Д имеют низкий КПД, по сравнению с преобразователями напряжения, из-за тройного преобразования энергии. Этот недостаток может быть значительно снижен применением управляемых преобразователей в цепях возбуждения с большим коэффициентом форсирования, что позволяет обеспечить точность и быстродействие системы Г-Д. Еще одним недостатком данных схем являются большие массогабаритные показатели [1].
В качестве приводного двигателя систем нагружения может быть использован синхронный и асинхронныйдвигатели.
Применение асинхронного двигателя при изменении скорости генератора вводит в контур преобразования мощности маховые массы асинхронного двигателя и генератора, позволяющие снизить толчки активной мощности, циркулирующей между испытуемым двигателем и сетью. Это явление позволяет выбирать приводной двигатель по перегрузке, близкой к статической. Однако большие колебания скорости асинхронного двигателя затрудняют реализацию нагружения с применением в системах генераторов с самовозбуждением.
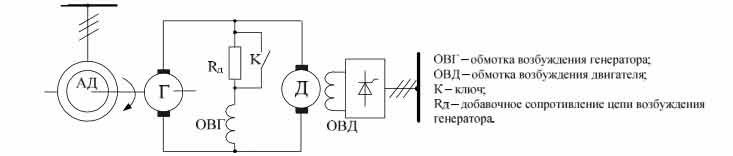
Рисунок 2 – Система нагружения на базе ГПТ с приводным асинхронным двигателем
Применение в качестве приводного синхронного двигателя позволяет получать постоянную скорость вращения вала генератора. Однако при частоте нагружения, близкой к частоте собственных колебаний, проведение испытания может привести к резонансным явлениям, которые в свою очередь приводят к выпадению двигателя из синхронизма и резким колебаниям потребляемой мощности.
В отличие от схемы ТП-Д, в предложенной системе нагружения по схеме СД-Г-Д, за счет введения автоматического регулирования тока возбуждения синхронного двигателя, можно обеспечить желаемое значение реактивной мощности и, как следствие, улучшение характеристик питающей сети. Это неоспоримое достоинство делает схемы СД-Г-Д удобными с точки зрения влияния на сеть с ограниченной мощностью при испытаниях двигателей большой мощности, но сохраняет в себе недостатки, присущие станциям с электромашинными преобразователями.
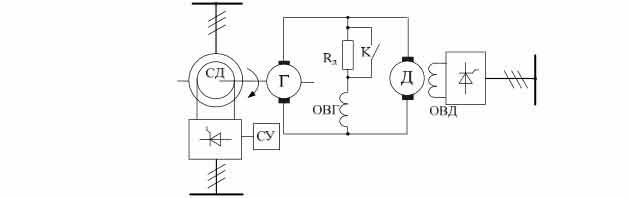
Рисунок 3 – Система нагружения на базе ГПТ с приводным синхронным двигателем
Выводы. Анализ систем динамического нагружения показал, что для испытания двигателей постоянного тока малой и средней мощности целесообразным является применение систем по схеме ТП-Д, что обусловлено меньшими массогабаритными параметрами и лучшей технологичностью. В свою очередь, при испытаниях двигателей большой мощности обоснованным является применение схем СД-Г-Д из-за возможности снижения влияния на питающую сеть с ограниченной мощностью. Применение в электроремонтных цехах систем динамического нагружения по одной из предложенных схем требует необходимости детального исследования процессов влияния на сеть и технико-экономического обоснования выбора того или иного варианта для конкретной мощности питающей сети и испытуемого оборудования.
БИБЛИОГРАФИЧЕСКИЕ ДАННЫЕ
1. Вольдек А.И. Электрические машины. – Л.: Энергия, - 1974. – 840 с.
2. Овчаренко А.С. [Розинский Д.И.] / Повышение эффективности электроснабжения промышленных
предприятий. - К.: Техника, 1989. – 287 с. с ил.
3. Родькин Д.И. Системы динамического нагружения и диагностики электродвигателей при послеремонтных испытаниях. – М.: НЕДРА, - 1992. – 236 с.