
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження
- 3. Класифікація мобільних роботів
- 4. Аналіз алгоритмів керування мобільним роботом
- 4.1 Мобільний робот, який визначає перешкоду
- 4.2 Мобільний робот, який рухається по лінії
- 4.3 Дистанційне керування мобільним роботом
- 4.4 Керування мобільними роботами за допомогою мовних команд
- 5. Вибір мікроконтролера
- 6. Технології швидкого прототипування
- Список джерел
Вступ
В даний час бурхливо розвивається розділ робототехніки, що займається створенням мобільних роботів.
Робототехніка – прикладна наука, що займається розробкою автоматизованих технічних систем і є найважливішою технічною основою інтенсифікації виробництва. В даний час вирішується досить велика кількість завдань, пов'язаних з організацією автоматичного переміщення робота, виконанням ним деяких елементарних дій [1]. Серед різних класів роботів, важливим сучасним класом є мобільні роботи, розміщені на рухомомій підставі, що застосовуються в промисловості (робокари), екології (динамічний моніторинг навколишнього середовища, робота в екологічно шкідливих умовах), військовій справі (робот-розвідник, робот, що несе легке озброєння і т.п.), побутової роботи (автономні пилососи, газонокосарки і т.п.) [2].
Однак створити роботів, які впевнено переміщаються по рівній поверхні, на якій є непереборні для них перешкоди, є складним із низки причин, в тому числі і через недосконалість алгоритмів керування.
1. Актуальність теми
Надійний алгоритм керування рухом електроприводів мобільних роботів є основоположним для успішної роботи.
Завдання керування рухом мобільних колісних роботів крім теоретичного значення набувають останнім часом все більше практичне в різних областях техніки і технологій. Спектр вирішуваних завдань при цьому виявляється дуже широким: від ігрових завдань до спеціальних завдань забезпечення безпеки. Високі вимоги до характеристик руху роботів обумовлюють необхідність використання засобів математичного і комп'ютерного моделювання на всіх етапах синтезу алгоритмів керування [3]. Тому дослідження в даній області є актуальним завданням.
2. Мета і задачі дослідження
Метою магістерської роботи є дослідження можливих алгоритмів керування електроприводами для мобільних роботів.
Основні задачі дослідження:
- Дослідження алгоритмів керування мобільного робота;
- Розробка мобільного робота з використанням алгоритмів керування електроприводами;
- Вибір мікроконтролера і апаратної частини робота;
- Технологія швидкого прототипування;
- Проектування математичної моделі мобільного робота з використанням програмного пакету MATLAB;
- Використання розробленого мобільного робота в освітньому процесі студентів;
- Аналіз отриманих результатів.
3. Класифікація мобільних роботів
Мобільний робот – це робот, який може самостійно пересуватися і переміщатися в просторі.
Одним з основних критеріїв поділу мобільних роботів на класи є спосіб пересування:
- Колісний спосіб – найбільш поширений спосіб пересування, який в залежності від числа використовуваних коліс можна розділити на підкласи. Перевагою використання низької (від 1 до 2) кількості коліс може служити простота конструкції і відмінна маневреність, з іншого боку, збільшення числа коліс розширює площу контакту з поверхнею, що сприяє значному поліпшенню прохідності.
- Гусеничний спосіб – найчастіше застосовується в бойових роботах, так як використання гусениць значно підвищує прохідність на пересіченій місцевості.
- Крокуючий спосіб – використання для пересування аналогів ніг підвищує складність проектування, разом з тим сучасні технології не дозволяють досягти стійкості, наближеною до людської.
- Пересування по повітрю – до нього відносяться так звані БПЛА (безпілотний літальний апарат), ракети, а також літаки і вертольоти, оснащені автопілотом.
- Плаваючий спосіб – використовує для пересування гребні гвинти або сили вітру, здатні пересуватися над і під водою, до цього способу відносяться БППА (безпілотний плаваючий апарат) а також кораблі, оснащені автопілотом [4].
4. Аналіз алгоритмів керування мобільним роботом
4.1 Мобільний робот, який визначає перешкоду
Найбільш загальними рухами робота є рухи, пов'язані з обходом об'єктів, для яких єдине обмеження полягає в тому, щоб робот не зіткнувся з об'єктами в робочому просторі. Тому при розробці різних завдань важливо планувати рух мобільного робота з урахуванням обходу перешкод. У різних областях були запропоновані різні алгоритми обходу перешкод. Існують деякі алгоритми, призначені для обходу роботом перешкод в тривимірному просторі.
Алгоритми можна розділити на кілька класів:
- Гіпотеза – тест;
- Штрафна функція;
- Метод скелетувания;
- Нечітка логіка.
Головна перевага методу гіпотеза – тест
полягає в його простоті. Основними обчислювальними операціями методу є визначення можливих
зіткнень і модифікація шляхів для запобігання зіткнень.
Другий клас алгоритмів обходу перешкод грунтується на визначенні штрафний функції для конфігурації мобільного робота, за допомогою якої кодується наявність об'єктів.
Нечітка логічна система виробляє однозначне перетворення вектора вхідних сигналів в вектор вихідних сигналів. Для цього перетворення використовується механізм нечіткого виведення, заснований на знаннях, закладених експертом [5].
Алгоритм визначення перешкоди реалізується установкою на корпус мобільного робота ультразвукового датчика відстані HC-SR04 (рисунок 1) при виявленні перешкоди на своєму шляху робот може об'їжджати його, і продовжувати подальше пересування або ж змінювати траєкторію свого шляху.

Рисунок 1 – Ультразвуковий датчик вимірювання відстані HC-SR04
Датчик визначає відстань до об'єктів точно так же, як це роблять дельфіни. Ультразвуковий датчик HC-SR04 генерує звукові імпульси на частоті 40 кГц і слухає відлуння. За часом поширення звукової хвилі туди і назад можна однозначно визначити відстань до об'єкта. Його можна також використовувати в якості датчика для сигналізації, що спрацьовує при наближенні об'єктів.
Характеристики ультразвукового датчику відстані HC-SR04:
- Напруга живлення: 5 В;
- Споживання в режимі тиші: 2 мА;
- Споживання при роботі: 15 мА;
- Діапазон відстаней: 2-400 см;
- Ефективний кут спостереження: 15° ;
- Робочий кут спостереження: 30°.
Призначення контактів:
VCC – позитивний контакт живлення;
GND – негативний контакт живлення;
TRIG – цифровий вхід;
ECHO – цифровий вихід.
Рисунок 2 – Принцип роботи ультразвукового датчика HC-SR04
(анімація: 7 кадрів, 8 циклів повторення, 34 кілобайта)
Принцип роботи ультразвукового датчика HC-SR04 (рисунок 2). На вхід Trig датчика подається імпульс високого рівня тривалістю 10-15 мікросекунд. Датчик посилає ультразвуковий сигнал chirp
з восьми коротких імпульсів частотою вище межі діапазону слуху людини. Електроніка датчика знає швидкість звуку в повітрі. Вимірюючи час між відправленим і прийнятим ультразвуком, ультразвуковий датчик
HC-SR04 формує вихідний сигнал. Через приблизно мікросекунду ультразвуковий датчик HC-SR04 видає на виході Echo імпульс високого рівня тривалістю до 38 мілісекунд. Якщо перешкод не виявлено, то
на виході буде сигнал з тривалістю 38 мс. Таким чином, для роботи з датчиком від електроніки приладу потрібно один цифровий керуючий вихід і один вхід для сигналу датчика. Довжина імпульсу на виході
Echo пропорційна відстані до перешкоди.
Варто відзначити, що швидкість звуку в повітрі залежить від температури. Цей фактор впливає на точність датчика [6].
4.2 Мобільний робот, який рухається по лінії
Алгоритм контролює переміщення мобільного робота вздовж чорної смуги на світлому фоні (рисунок 3).
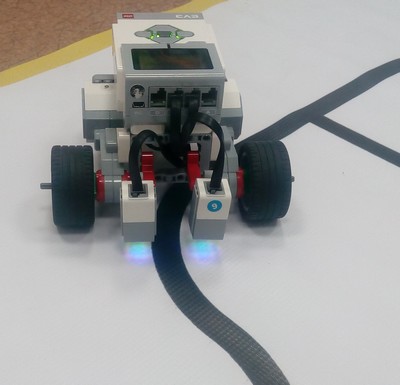
Рисунок 3 – Приклад робота з рухом по лінії
Для вирішення даного завдання можна використовувати цифровий датчик лінії TCRT5000 (рисунок 4).

Рисунок 4 – Цифровий датчик лінії TCRT5000
Цифровий датчик, дозволяє відстежувати рух робота по лінії. Датчик розрізняє два кольори: чорний і білий (світлий). Сигнал видається у вигляді логічного 0 або 1, залежно від кольору: 1 – чорний, 0 – не чорний.
Основний фотоелемент працює в інфрачервоному спектрі. Додатково на сенсорі встановлений світлодіод, який загорається коли поверхню під датчиком світла. Це зручно для діагностики і настройки. Змінний резистор, встановлений на сенсорі, дозволить регулювати чутливість сенсора в широких межах. Це дозволяє відкалібрувати датчик під конструкцію робота, матеріал покриття і різні умови зовнішнього освітлення.
Сенсор може бути закріплений на дні мобільної платформи, щоб змусити робота не виїжджати за межі території означеної контуром, або щоб він дотримувався чорної лінії.
Цей датчик випускає інфрачервоний сигнал і потім ловить відображення цього інфрачервоного сигналу від поверхні. Також даний датчик може використовуватися як альтернатива датчику Холла, для визначення швидкості обертання [7].
Характеристики датчику лінії TCRT5000:
- Відстань до вимірюваного об'єкта: 12 мм;
- Струм: 10 мА;
- Робоча довжина хвилі: 950 мм;
- Метод зондування: відображення;
- Напруга живлення: 5 В.
Для оптимального відпрацювання руху по лінії необхідна наявність двох датчиків лінії, тоді алгоритм буде наступним:
- Якщо обидва датчика бачать білий колір – робот пересувається вперед;
- Якщо один з датчиків бачить білий, а другий чорний – робот повертається в бік чорного;
- Якщо обидва датчика бачать чорний колір – робот зупиняється, або продовжує свій шлях до пошуку чорної лінії [8].
4.3 Дистанційне керування мобільним роботом
Крім можливості доступу в різні локації, роботи повинні мати можливість керуватись на відстані, тому що на сьогоднішній день не всі процеси при функціонуванні робота можливо автоматизувати. Збільшене число можливостей і функцій, які виконуються роботами, перетворило пристрої керування в складні і громіздкі набори важелів і кнопок, керування якими вимагає додаткових тренувань і навичок.
На зміну пультів керування можуть прийти більш універсальні пристрої – смартфоны. У зв'язку з розвитком мікроелектроніки смартфони стали одними з найбільш затребуваних пристроїв в сучасному світі. Така популярність призводить до того, що щорічно вони продаються мільярдними партіями в усьому світі, що дозволяє говорити про те, що вони давно стали заміною мобільних телефонів і є майже у кожної людини. Зростаючий слідом ринок мобільних технологій перетворює смартфон в універсального помічника для користувача при взаємодії з різними фізичними пристроями і сервісами в мережі Інтернет. На основі цього можна зробити висновок, що сучасні смартфони, як ніщо інше, підходять на роль універсального і багатофункціонального пристрою віддаленого керування.
Для дистанційного керування мобільним роботом можна використовувати Bluetooth Module HC-05 (рисунок 5), він є зручним засобом для організації керування мікроконтроллерними пристроями за допомогою телефону або планшета.
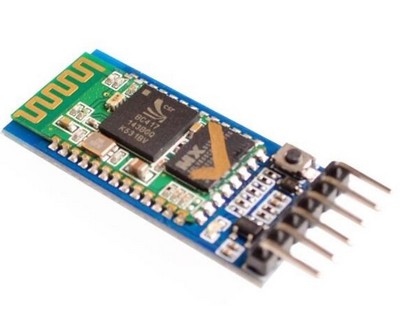
Рисунок 5 – Bluetooth Module HC-05
Bluetooth – це мабуть найпоширеніший тип зв'язку для коротких дистанцій, яким користуються більшість сучасних електронних пристроїв.
Модуль HC-05 – модуль широкого застосування для з'єднання пристроїв через Bluetooth-підключення. Bluetooth модуль управляється за допомогою UART, тобто по суті є UART-to-Bluetooth перетворювачем.
4.4 Керування мобільними роботами за допомогою мовних команд
Розробка системи мовного керування роботом є складним і трудомістким процесом. Спочатку необхідно розпізнати мовне повідомлення, а потім його текст перевести в послідовність команд мови керування роботом і забезпечити їх виконання. Єдиним критерієм на повноту правильності розуміння команд роботом є виконання ним необхідних дій. Проводити весь процес налагодження системи над «живим» роботом було б дорого і нерозумно. Тому при створенні системи мовного керування роботом для спрощення процесу розробки і його прискорення, а також підвищення якості всіх компонентів системи має сенс використовувати не робота, матеріалізованного в «металі», а його програмну модель або симулятор. Основною вимогою до такого симулятора є точне виконання команд, що подаються роботу. Воно може складатися, наприклад, в зміні положення об'єктів на екрані монітора або видачі мовних повідомлень, які виходять від самого робота. Використання симулятора дозволяє краще і точніше підібрати і налагодити систему команд керування роботом. Замовник уже на початкових етапах роботи може судити по моделі робота про його можливості і вносити бажані корективи. Крім того, використання симулятора робота дозволяє більш тонко налаштувати систему мовного керування, полегшує і прискорює розробку і налагодження лінгвістичного процесора. [9].
В цілому, за останні п'ять років вдалося досягти значного прогресу в вирішенні задачі комп'ютерного розпізнавання мови, а лідерами в цій галузі є розробки GoogleSpeech від Google і Siri від Apple. Ці технології ґрунтуються на статистичних моделях: комбінаціях Прихованих марківських моделей (СММ) і нейронних мереж. На етапі попередньої обробки мовного сигналу використовуються, в основному, кепстральних коефіцієнти на шкалі крейда (MFCC), що дозволяють компактно описати спектр сигналу. Однак недоліком зазначених програмних рішень є те, що вони вимагають зв'язку з інтернетом і доступу до великих колекцій мовних даних для навчання. Крім того, мобільним роботам необхідно враховувати специфічний шум від власного руху [10].
5. Вибір мікроконтролера
Мабуть, саме вибір мікроконтролера є одним з найбільш важливих рішень, від яких залежить успіх або провал задуманого проекту. При виборі мікроконтролера необхідно врахувати і оцінити велику кількість факторів.
32-розрядні мікроконтролери випускаються багатьма виробниками, але найбільш широке поширення, на поточний момент, отримав продукт спільної франко-італійсько-японської фірми STMicroelectronics (STM). Досить низька вартість, зручність програмування і наявність безкоштовного програмного забезпечення (ПЗ) сприяли його просуванню. Найбільш продуктивними в сімействі STM32 є мікроконтролери лінійки STM32F4Discovery. Засновані на ARM Cortex-M4 мікроконтролери серії STM32F4 є продовженням провідною лінійки STM32, володіючи ще більш високою продуктивністю.
Обов'язковим атрибутом налагоджувальних плат сьогодні є велике число контактів, які дозволяють отримати доступ практично до всіх портів мікроконтролера, а також інтерфейси у вигляді світлодіодів і кнопок. Також в багатьох налагоджувальних платах вбудовується програматор, який дозволяє програмувати зовнішні мікросхеми.
Основні характеристики STM32F4Discovery:
- 32-бітний мікроконтролер STM32F407VGT6 з ядром ARM Cortex-M4F з 1 Мб пам'яті програм і 193 Кб ОЗУ в 100-вивідному корпусі LQFP100 з тактовою частотою 168 МГц. Вбудовані операції з плаваючою точкою (FPU);
- Вбудований програматор / відладчик ST-LINK / V2 з можливістю вибору режиму роботи (позвоялет програмувати зовнішні мікросхеми, використовуючи SWD-коннектор для програмування і налагодження);
- Живлення плати: через шину USB або від зовнішнього 5В джерела живлення;
- 3-х осьовий МЕМС акселерометр на базі мікросхеми LIS302DL або LIS3DSH від компанії ST;
- Аудіо ЦАП CS43L22 з вбудованим підсилювачем класу D;
- Дві кнопки (Reset и User);
- USB OTG з роз'ємом micro-AB;
- Вісім світлодіодів: LD1 (червоний / зелений) для індикації активності шини USB, LD2 (червоний) для живлення 3.3В, 4 користувальницьких діода: LD3 (помаранчевий), LD4 (зелений), LD5 (червоний) і LD6 (синій), 2 діода USB OTG: LD7 (зелений) для VBus і LD8 (червоний) при перевантаженні.
Великим плюсом є наявність в мікроконтролері модуля для роботи з числами з плаваючою точкою, що збільшує швидкість обробки в додатках, пов'язаних, наприклад зі спектральним аналізом або ж в БПЛА для алгоритмів орієнтації [11].
Даний мікроконтролер має усі необхідні компонентами і характеристики для вирішення поставлених завдань, також дана плата підтримує сумісність з програмним пакетом Matlab.
6. Технології швидкого прототипування
На стадії проектування виробів масового споживання (від автомашин до упаковки) розробники стикаються з необхідністю візуальної оцінки їх зовнішнього вигляду, правильності конфігурацій, збирання з комплектуючими деталями, оцінкою можливості збуту і іншими питаннями. Відповіді на них вимагають наявності реальної моделі (прототипу) виробу, максимально наближеною до своєї комп'ютерної розробки.
Традиційні способи виготовлення моделей трудомісткі, мають низьку точністю і погану повторюваність при відтворенні. Однак сучасне виробництво володіє технологіями швидкого прототипування – RP (Rapid Prototyping) – а це означає, ефективність методів і обладнання для виготовлення не тільки прототипів (одиничних виробів), а й досвідчених партій, особливо якщо це стосується виробів з пластмаси.
Як правило, технологія швидкого створення прототипів складається з двох основних етапів:
- отримання математичної 3-мірної (3D) моделі виробу;
- виготовлення прототипу виробу одним з методів.
Моделі виробу в 3D форматі можуть бути побудовані з використанням системи автоматизованого проектування (CAD) або введені в персональний комп'ютер (ПК) з оригіналу за допомогою об'ємного сканера. Після сканування модель повинна бути оброблена за допомогою будь-якої програми, щоб отримати закінчений вигляд. Далі вона посилається за двома напрямками: в систему підготовки керуючих програм (КП) (наприклад, в систему Power MILL) і на прототипування (при необхідності). Роботи першого напряму завершуються підготовкою КП для обладнання з числовим програмним управлінням (ЧПУ), а для прототипування 3D модель повинна бути оброблена.
Технології швидкого прототипування відносять до методів, які базуються на додаванні матеріалу (на відміну від класичної механообработки). Їх прийнято поділяти на рідкі, порошкоподібні і листові твердотільні.
Процеси з рідкими витратними матеріалами поділяються в свою чергу на процеси затвердіння за допомогою контакту з лазером, затвердіння електрозаряженних рідин або затвердіння попередньо розплавленого матеріалу.
Процеси з порошкоподібними матеріалами здійснюють скріплення частинок під впливом лазера або вибіркового нанесення сполучних компонентів.
Процеси з твердотільними листовими матеріалами можуть бути класифіковані за способом їх з'єднання: лазером або шаром адгезиву.
Найбільш використовувані технології швидкого прототипування:
- стереолітографія – StereoLithography (SLA);
- затвердіння на твердій основі – Solid Ground Curing (SGC);
- нанесення термопластів – Fused Deposition Modelig (FDM);
- розпорошення термопластів – Ballistic Particle Manufacturing (BPM);
- лазерне спікання порошків – Selective Laser Sintering (SLS);
- моделювання за допомогою склеювання – Laminated Object Modeling (LOM).
Кожна з RP технологій заснована на певному методі створення прототипу, має свої особливості і володіє певними перевагами і недоліками при вирішенні конкретних завдань [12].
Тематика розробки мобільних роботів була розпочата ще в бакалавраті. Відео-огляд на бакалаврську роботу представлений нижче:
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список джерел
Робототехника
// Википедия, статья [Электронный ресурс] – Режим доступа: ru.wikipedia.org, свободный.- Звонарев Д.А. Управление мобильным роботом с электрическим двигателем / Д.А. Звонарев // Известия Тульского государственного университета. – 2011. – c. 368 – 372.
- Бурдаков С.Ф. Алгоритмы управления движением мобильного робота в задаче преследования / С.Ф. Бурдаков, П.А. Сизов // Журнал
Научно-технические ведомости СПбГПУ
. – 2014. – c. 49 – 58. - Колпаков С. Г., Мячиков А. Д. Классификация роботов по использованию, передвижению и компонентам // Молодой ученый. – 2017. – №3. – c. 241 – 244.
- Васюк А.О. Планирование пути автономного робота в изменяющейся окружающей среде / А.О. Васюк, Р.М Бабаков // VI міжнародна науково-практична конференція молодих учених
Сучасна інформаційна Україна: інформатика, економіка, філософія
. – Донецьк, ДонНТУ – 2012. – с. 267 – 271. - Ультразвуковые датчики [Электронный ресурс] – Режим доступа: HC-SR04, свободный.
- Инфракрасный датчик TCRT5000 работающий на принципе отражения света [Электронный ресурс] – Режим доступа: tcrt5000, свободный.
- Движение по линии с двумя датчиками [Электронный ресурс] – Режим доступа: studrobots.ru, свободный.
- Загорулько Ю.А. Моделирование робота, управляемого речевыми сигналами / Ю.А. Загорулько // Журнал
Известия Томского политехнического университета
. – 2011. – c. 98 – 102. - Шарий Т.В. Голосовое управление мобильным роботом на основе когнитивной модели FCAS / Т.В. Шарий //
Штучний інтелект
– 2014. – c. 75 – 84. - Отладочная плата STM32F4 Discovery [Электронный ресурс] – Режим доступа: robotosha.ru, свободный.
- Технологии быстрого прототипирования [Электронный ресурс] – Режим доступа: stanko-arena.ru, свободный.