Рисунок 1 – Главное окно RMTool
Авторы: Ramon Gonzaleza, Cristian Mahuleaa, Marius Kloetzerb
Автор перевода: Поляков Н. Е.
Источник: Autonomous Robot Navigation in Highly Populated Pedestrian Zones
Краткий обзор
Данная работа представляет находящийся в Matlab инструмент интерактивного программного обеспечения с открытым исходным кодом для обучения мобильной робототехникой. В частности, речь идет о моделировании, планировании пути, а также контроле движения. Данный симулятор предлагает тестирования различных алгоритмов управления, и возможность мгновенно увидеть результат в графическом пользовательском интерфейсе (GUI). Некоторые иллюстративные примеры демонстрируют преимущества предлагаемого имитатора.
Общее описание средства моделирования
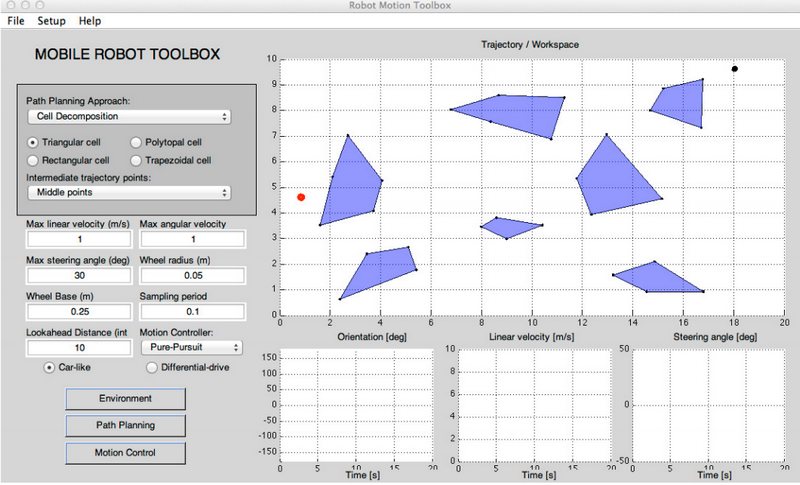
Библиотека мобильный робот (MRTool) представляет собой удобный графический интерфейс пользователя (GUI), который позволяет пользователю легко вводить входные параметры, чтобы выполнить моделирование (рисунок 1). Данная библиотека имеет несколько графических сред, в которых отображаются результаты моделирования. Рабочее пространство, в котором перемещается робот, может быть или определено пользователем в обьекте осей Matlab, или это может быть импортировано из .mat файла. Есть несколько доступных для редактирования объектов текстового поля и всплывающих меню, где пользователь может определить различные параметры для планирования пути и управления движением. Графический интерфейс пользователя включает пять панелей управления: Меню (Menu), Область рисования (Drawing Area), Панель планирования пути (Path Planning Panel), Панель управления движением (Motion Control Panel) и Панель моделирования (Simulation Panel).
Рисунок 1 – Главное окно RMTool
Панель Меню (расположенная горизонтально, поверх главного окна RMTool) отображает набор из трех раскрывающихся меню: Файл
, Настройка
и Справка
. Меню Файл
предлагает средства для операций по обработке файлов и содержит следующие две команды: Открыть
(разрешить открытие некоторых ранее использованных данных) и Сохранить
(что сохраняет текущие данные в .mat
файл). Меню настройки имеет три подменю, позволяющих пользователю вводить различные входные параметры.
Область рисования. Объект основных осей, расположенных в верхней правой части главного окна, используется для определения препятствий, представления траектории, полученния алгоритма планирования пути, и отобржение симуляции движения.
Панель планирования пути расположена в левой верхней части графического интерфейса пользователя и состоит из двух всплывающих меню и четырех переключателей объекта. Используя первое всплывающее меню, пользователь может выбрать подход, используемый для планирования маршрута. RMTool реализует три подхода: декомпозицию ячеек, график видимости и обобщенный вороной (Voronoi).
Панель управления движением расположена чуть ниже панели планирования пути, она состоит из семи редактируемых объектов, одного всплывающего меню и двух переключателей.
Панель моделирования состоит из трех кнопок, которые используются для запуска моделирования.
Кнопка Окружающая среда
(Environment) запускает процедуру определения новых препятствий в окружающей среде. Используя мышь, пользователь может ввести препятствие в объект главной оси.
Алгоритмы планирования пути
Проблема мобильных роботов в планировании маршрута относится к поиску пути (эталонной траектории) от заданной начальной до желаемой конечной позиции. Этот путь должен избегать любых препятствие во время перемещения. Оптимальность пути обычно связана с маршрутами минимальной длины, но в некоторых случаях кратчайшее расстояние не гарантирует достижения конечной точки, например, из-за неравномерности местности [1] или ограничения маршрута [2].
Кинематические модели роботов
В контексте робототехники модель определена как ряд математических дифференциальных уравнений это представляет поведение робота. В этом смысле кинематическое и динамическое моделирование является ключевым которые могут быть использованы для оценки местоположения робота и внедрения имитаторов программного обеспечения. В этой работе рассматриваются две кинематические модели для моделирования движения: мобильный метод (car-like robot) и робот с дифференциальным методом (differential-drive robot). Кроме того, такие модели будут использоваться для оценки положение робота в каждый момент времени (интегрированный из исходного положения робота).
Мобильный метод
Четырехколесные мобильные роботы (автомобили Ackerman) являются самыми популярными [3], и данная конфигурация была первым выбором для включения в RMTool. В общем, такой робот моделируется с точки зрения модели велосипеда. Велосипед имеет заднее колесо, прикрепленное к корпусу, а плоскость переднего колеса вращается вдоль вертикальной оси для управления транспортным средством (рисунок 2а) [4]. Предполагается, что транспортное средство движется только вперед, а колеса не могут скользить вбок.
Дифференциальный метод
Возможно, второй наиболее часто используемой конфигурацией в мобильной робототехнике является дифференциальный метод. По факту, это самая простая механическая конфигурация, поскольку только две параллельные ведущие колеса, установленные на оси достаточно для перемещения робота (рисунок 2b).
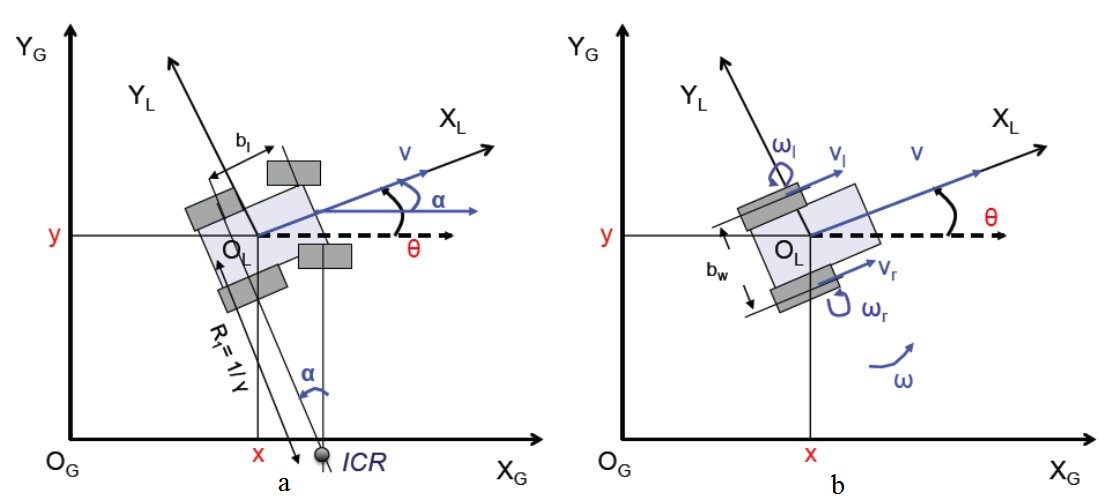
Рисунок 2 – Конфигурации роботов, рассмотренные в программном обеспечении RMTool
(a) мобильный метод, (b) дифференциальный метод
Алгоритмы управления движением
Мобильные роботы должны иметь эффективные алгоритмы движения, которые генерируют соответствующие действия управления, чтобы успешно управлять роботом таким образом, что он следует за эталонной траекторией заданной планировщиком. Контроллеры движения с замкнутым контуром используют текущую позицию робота для принятия новых решений (управляющих входов), которые в конечном итоге приводят робота к желаемой цели или путевой точке [5]. Точная локализация робота играет ключевую роль в работе управлении движения.
Как упоминалось ранее, робот с конкретной кинематической моделью, может иногда не быть в состоянии внимательно следить за эталонным путем, предназначенным для универсального робота. Если робот покидает окружающую среду или попадает в препятствие, сообщается пользователю. Такие ситуации служат образовательной целью RMTool, поскольку ученик легче понимает ошибки, которые могут возникнуть, когда в процедуре планирования не учитывается конкретный робот.
Выводы и будущая работа
Ключевым элементом в опыте обучения робототехнике является использование программных симуляторов. Эта работа показывает интерактивный инструмент, призванный помочь профессорам и ученикам понять основные понятия, касающиеся мобильных роботов. Среди других вопросов, RMTool позволяет четко понимать важность планирования пути и управления движением.
Будущие усилия будут сосредоточены на некоторых направлениях. Предполагаемое расширение включает в себя алгоритмы которые занимаются планированием и контролем группы мобильных роботов, а не одного робота. Кроме того, мы стремимся внедрить в RMTool различные подходы, которые позволяют мобильным роботам выполнять гораздо больше типов движения, чем предотвращение препятствий.