
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Цели и задачи исследования
- 2. Предназначение и классификация АПВ
- 2.1 Анализ эффективности АПВ на повышение запасов динамической устойчивости
- 3. Общая характеристика ЭТ
- 3.1 Анализ эффективности ЭТ на повышение запасов динамической устойчивости
- 4. Программная среда для расчетов
- Выводы
- Список источников
Введение
В последнее время прослеживается стремление к объединению энергосистем. Это обосновано тем, что у крупных ЭС есть большое преимущество в сравнении с объединениями, состоящими из отдельно работающих электрических подстанций и потребителей, которые к ним подключены. Энергетические системы находятся в разных экономических районах и связаны между собой ЛЭП высокого напряжения. В объединении энергосистем имеется ряд преимуществ, таких как: эффективное использование ресурсов энергетики, повышение экономической выработки электрической энергии, уменьшение суммарной установленной мощности электрических станций объединенных энергосистем, увеличение единой мощности агрегатов, повышение надежности и устойчивости системы за счет резервирования и ПА, повышение маневренности в энергосистемах, разгрузка магистральных ЛЭП, вероятность присоединения новых потребителей, сокращение численности ремонтного персонала и автоматизация производственных процессов.
Но при всех этих плюсах, объединение энергосистем имеет и ряд недостатков. К ним относятся: усложнение релейной защиты, автоматики и управления режимами. Для устранения этих недостатков требуется развитие методов оптимизации режимного управления и максимальное повышение эффективности автоматического противоаварийного управления. Сфера приложения противоаварийного управления это, прежде всего, электромеханические переходные процессы в аварийных режимах.
1. Цели и задачи
Целью настоящей работы является оценка эффективности и обоснование применения в электроэнергетических системах различных видов АПВ и электрического торможения генераторов как средств противоаварийной автоматики коммутационного типа.
Для достижения поставленной цели должны быть решены следующие задачи:
- Выполнен анализ существующих способов АПВ на одиночных и двухцепных линиях с двухсторонним питанием, связывающих передающую и приемную части ЭЭС.
- Выполнен анализ свойств электрического торможения генераторов.
- разработан комплекс программ для расчета переходных процессов при возмущениях, вызванных различными видами коротких замыканий, их устранения и повторного включения для возможных случаев успешного или неуспешного АПВ, а так же выполнен расчет переходных процессов при ЭТ генераторов, при последовательном и параллельном включении активных сопротивлений в электрическую цепь.
- Выполнен анализ по оценке эффективности применения АПВ и ЭТ генераторов как средств противоаварийного управления ЭС, направленных на повышение запасов динамической устойчивости электроэнергетических систем.
Основными целями противоаварийного управления являются обеспечение требуемого уровня надежности электроснабжения потребителей и живучести энергосистемы [1].
Чтобы достичь свои цели ПА должна решать следующие задачи: предотвращение нарушения статической и динамической устойчивости ЛЭП в нормальном и послеаварийном режиме, предотвращение асинхронного режима, ликвидация асинхронного режима в случае нарушения устойчивости, предотвращение повышения напряжения на ЛЭП при отключении одной стороны.
В первую очередь ПА должна решать первую задачу. Очень важно обеспечивать синхронную и статическую устойчивость нормальных и послеаварийных режимов, так как нарушение электроснабжения потребителей может вызвать тяжелый экономический ущерб [2].
2. Предназначение и классификация АПВ
Основным назначением АПВ является восстановление работы объекта ЭС: потребителя, участка ЛЭП, участка ПС или электродвигателя.
АПВ классифицируются по следующим основным признакам:
- по кратности действия (однократные и многократные);
- по числу включаемых фаз;
- по виду включаемого оборудования – АПВ ЛЭП, шин распределительных устройств, трансформаторов, двигателей;
- по способу воздействия на привод выключателя.
Автоматическое повторное включение делится на однофазное и трехфазное. При трехфазном АПВ (ТАПВ) противоаварийной защитой отключаются, а затем повторно включаются все три фазы ЛЭП в независимости от вида короткого замыкания. При однофазном АПВ (ОАПВ), которое применяется в сетях с эффективно заземленной нейтралью и с пофазным управлением выключателя, в случае однофазного короткого замыкания противоаварийной защитой коммутируется только поврежденная фаза. Выполняется ОАПВ только однократным и комбинируется с ТАПВ.
Трехфазные АПВ (ТАПВ) делятся на несколько групп:
- АПВ линий с односторонним питанием;
- АПВ линий с двухсторонним питанием.
В свою очередь ТАПВ с двухсторонним питанием делятся на: несинхронное АПВ (НАПВ), быстродействующее АПВ (БАПВ), АПВ с ожиданием синхронизма (АПВОС) и АПВ с улавливанием синхронизма (АПВУС).
Устройства АПВ получили широкое распространение в электроэнергетических системах. АПВ комбинируют с разными типами релейной защиты и автоматики, что дает возможность автоматизировать в большинстве своем работу на ПС, при этом исчезает надобность в использовании оперативного персонала на объекте. Еще одним положительным фактором использования АПВ является появление возможности избегания ошибок обслуживающего персонала.
АПВОС, АПВУС и НАПВ в работе не рассматриваются, так как они срабатывают после нарушение устойчивости системы.
2.1 Анализ эффективности АПВ на повышение запасов динамической устойчивости
Как известно, восстановление нормальной работы при успешных и неуспешных АПВ ограничивается возможным нарушением динамической устойчивости ЭЭС [3].
При трехфазном АПВ на одиночной ЛЭП в режиме паузы АПВ на электростанции или эквивалентном генераторе происходит практически полное сбрасывание мощности,
т.е.. активная мощность падает до нуля, а по окончании паузы при успешном АПВ мощность скачком увеличивается в связи с переходом на угловую характеристику
мощности нормального исходного режима. При выполнении практического критерия динамической устойчивости, основанного на правиле площадей
, генератор после
нескольких циклов качаний вновь работает в нормальном режиме. В случае неуспешного ТАПВ генератор будет вырабатывать и отдавать активную мощность в соответствии
с характеристикой аварийного режима.
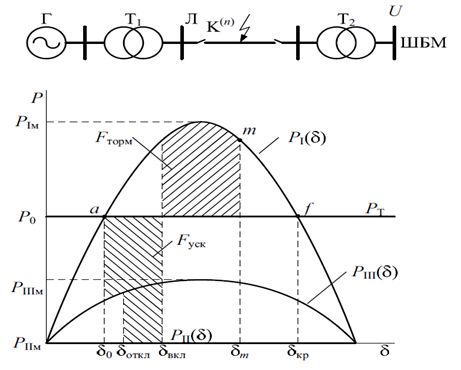
Рисунок 1 – Успешное ТАПВ на одноцепной ЛЭП
При неуспешном ТАПВ ЛЭП вновь отключается на продолжительное время и в этом случае обеспечение устойчивости системы одиночной ЛЭП не имеет смысла.
В неполнофазном режиме при ОАПВ угловая характеристика мощности генератора имеет достаточно большой максимум. Начинается процесс торможения ротора, который происходит в режиме с отключенной одной фазой (рис.2).
При успешном ОАПВ происходит переход на характеристику мощности нормального режима и мы видим процесс восстановления исходного установившегося режима.
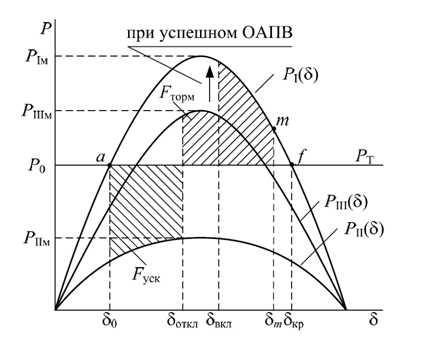
Рисунок 2 – Успешное ОАПВ на одноцепной линии ЛЭП
При неуспешном ОАПВ осуществляется трехфазное отключение поврежденной линии и связь электрической станции с приемной энергосистемой теряется.
Отсутствие АПВ приводит к нарушению параллельной работы ЭЭС. В случае успешного АПВ запасы динамической устойчивости повышаются и возможно удержание системы в синхронизме. В случае неуспешного АПВ условия устойчивости существенно ухудшаются по сравнению со случаем отказа от применения АПВ [4]. Случай, когда неуспешное ТАПВ приводит к нарушению динамической устойчивости, в то время как она могла быть обеспечена при отказе от АПВ, приведен на рис.4.
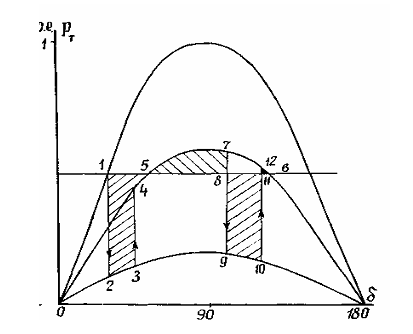
Рисунок 4 – К оценке СДУ ЭЭС при неуспешном ТАПВ
3. Общая характеристика ЭТ
Электрическое торможение генераторов (ЭТ) – это средство противоаварийной автоматики, которое обеспечивает управляющее воздействие импульсного типа и осуществляется с помощью включения в электрическую цепь резисторов. Включение резисторов можно делать параллельно или последовательно.
При переходных процессах в электрической системе возникают возмущения, которые ведут к нарушению динамической устойчивости системы. При этом возникает возможность появления асинхронного хода, выпадения генераторов из синхронизма и т.д. Все это может привести к тяжелым последствиям для ЭЭС и электропотребителей. Для избежания этого требуется усовершенствование работы средств ПА и применение дополнительных управляющих устройств, воздействие которых направлено на переходные процессы. Одним из таких средств является электрическое торможение (ЭТ) синхронных генераторов [5], под которым понимается целенаправленное подключение нагрузочных (тормозных) сопротивлений либо изменение параметров схемы системы, например, сопротивлений некоторых заранее выбранных элементов схемы, влияющих на изменение нагрузки генераторов.
3.1 Анализ эффективности ЭТ на повышение запасов динамической устойчивости
Для пояснения принципа работы ЭТ и способов включения или отключения сопротивлений рассмотрим моментно-угловые характеристики рис.5, на котором рассматривается
ослабление связи в следствии отключения линии электропередач при КЗ на ней. По достижению определенного значения угла δвкл, который соответствует моменту включения
сопротивления ЭТ (рис.5,а), происходит изменение Рт и переход на другую моментно-угловую характеристику г
с пониженной максимальной мощностью Рт [6].
При достижении угла отключения δотк резистор отключается и начинается возврат к исходному (нормальному) значению и характеристике в
.
Если электрическое торможение имеет малую длительность (tотк - tвкл < tmix), то после отключения резистора угол δ может превысить критическое значение, которое соответствует точке 6. В этом случае в первом цикле будет нарушение устойчивости системы.
При избыточной длительности ЭТ (tотк - tвкл > tmax) произойдет нарушение устойчивости во втором цикле качаний. Для пояснения этого случая на рис.5,б рассмотрен вариант отключения резистора при δотк < δвкл , т.е. после прохождения не только максимума угла δ, но и значения угла, при котором было осуществлено включение [7].
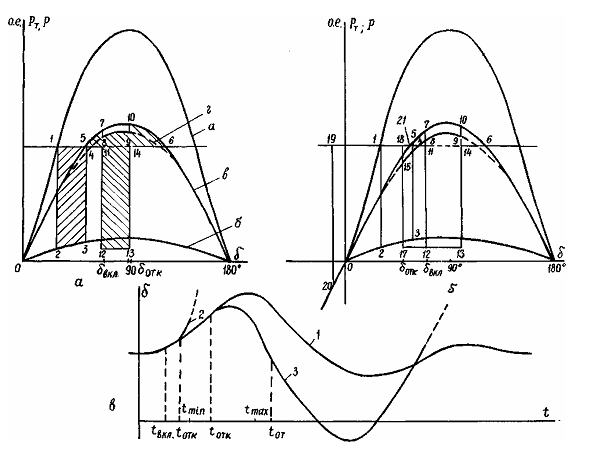
Рисунок 5 – Моментно-угловые характеристики при ЭТ
Для достижения положительных результатов требуется достаточно точное управление ЭТ. В настоящее время существуют несколько вариантов устройств управления, которые основываются на программном управлении и на управлении, зависящем от изменения режимных параметров. При этом обычно изменяемым является время tотк, а tвкл принимается минимально возможным. Следует отметить, что использование установок электрического торможение генераторов ограниченно ввиду их большой стоимости. Электрическое торможение помогает обеспечить динамическую устойчивость электрической системы и качественный послеаварийный переходный процесс [7]. Но существуют трудности при реализации управления ЭТ, таких как передача измеренных параметров режима на большие расстояния с сохранением быстродействия.
4. Программная среда для расчетов
Расчеты дипломной работы производились в MathCAD. Это программное обеспечение позволило выполнить численные и аналитические вычисления, построить графики моментно-угловых характеристик при использовании различных способов противоаварийных управлений, а так же оценить устойчивость системы после тяжелых возмущений.
Выводы
Выполненный в магистерской диссертации анализ позволяет сделать вывод, что применение в электроэнергетических системах такой противоаварийной автоматики как ТАПВ, ОАПВ и ЭТ позволяет повысить надежность энергосистемы. Разработанное программное обеспечение позволяет оценить динамическую устойчивость системы при использовании ПА коммутационного типа. Исследования дает возможность оценить параметры настройки АПВ и ЭТ в различных аварийных ситуациях при больших возмущениях в конкретных условиях работы системы.
Замечания
На момент написания данного реферата магистерская работа еще не завершена. Предполагаемая дата завершения: май 2017 г. В данный реферат будут вноситься изменения по мере выполнения работы. Окончательную работу можно будет получить у автора или его руководителя после указанной даты завершения написания.
Список источников
- Кощеев, Л. А. Автоматическое противоаварийное управление в электроэнергетических системах / Л. А. Кощеев. – Изд-во УДК 621.311/621.316 – с. 94-96.
- Глускин, И. З. Противоаварийная автоматика в энергосистемах / И. З. Глускин, Б. И. Иофьев, А. А. Меклина, Л. Н. Чекаловец. – М.:
Знак
. 2009. – 568 с. - Хрущев, Ю. В. Электромеханические переходные процессы в электроэнергетических системах: учебное пособие / Ю. В. Хрущев, К. И. Заподовников, А. Ю. Юшков; Томский политехнический университет. – Томск: Изд-во Томского политехнического университета, 2010. – 160 с.
- Веников, В.А. Переходные электромеханические процессы в электрических системах / В. А. Веников. – М.: ВШ, 1985. – 536 с.
- Овчинников, В. В. Библиотека электромонтера. Автоматическое повторное включение / В. В. Овчинников. – М. Энергоатомиздат 1987 – 410 с.
- Колесник, Г.П. Переходные электромеханические процессы в электроэнергетических системах : учеб. пособие / Г. П. Колесник; Владим. гос. ун-т. – Владимир : Изд-во Владим. гос. ун-та, 2008. – 116 с.
- Жданов, П. С. Вопросы устойчивости электрических систем / П. С. Жданов. – Изд-во М., Энергия, 1979. – 456 с.