
Реферат за темою випускної роботи
Дослiдження електропривода вентилятору на базі синхронної машини з постійними магнітами
Зміст
- Вступ
- 1. Актуальність теми
- 2. Конструкції і типи СДПМ
- 3. Алгоритми управління
- 3.1 Управління по датчикам Холла
- 3.2 бездатчикового управління по прямому вимірюванню зворотного ЕРС
- 3.3 бездатчикового управління за непрямим виміру зворотного ЕРС
- 4. Вибір апаратної частини
- 4.1 Силова частина
- 4.2 Цільова платформа
- Висновки
- Список джерел
Вступ
У даній статті розглядається розробка і доцільність модернізації алгоритму управління контролера (ESC) для СДПМ з трапецеидальной формою зворотного ЕРС вживаного у якостi тягового електроприводу гвинтомоторної групи. Аналіз і вибір оптимального алгоритму управління за різними критеріями (тяга / струм, якість регулювання / вартість і ін.).
1. Актуальність теми
Електропривод з вентиляторною характеристикою найбільш поширений і зустрічається практично всюди. Навіть у вас вдома напевно знайдеться такий механізм (куллер в ПК, кондиціонери, пилососи). У загальному випадку, для даних механізмів, підходять абсолютно всі типи електродвигунів, однак, найбільший інтерес представляє застосування синхронного двигуна з постійними магнітами, дане твердження обумовлено тим, що:
- СДПМ мають найвищий ККД (приблизно на 2% більше, ніж високо ефективний (IE3) асинхронний електродвигун [1])
- Мають найкращі, серед всіх типів електродвигунів, співвідношеннями потужність / вага, момент / інерція і ін.
- Має менший в порівнянні з АД діапазон регулювання швидкості, що відповідає вимогам механізму з вентиляторним характером навантаження.
З розвитком напівпровідникової і мікропроцесорної техніки з'явилася можливість застосовувати СДПМ в якості регульованого електроприводу (з діапазоном регулювання від нульових до обмежених специфікацією на двигун швидкостей навіть для бездатчикового систем), що істотно розширило область їх застосування аж до авиамоделизма, робототехніки, машинобудування.
При використанні СДПМ як привід гвинтомоторної групи, зокрема, для авиамоделизма гостро стоїть питання часу роботи від АКБ який можливо вирішити розробкою такої системи управління, яка дозволила б досягти максимуму тяги при мінімумі споживаного струму. Так само система управління повинна бути робастною тому ,що на двигун постійно діють обурення різного характеру (пориви вітру, вібрації від сусідніх двигунів і ін.).
2. Конструкції і типи СДПМ
2.1 По розташуванню ротора
Ротор може располагатся всередині статора (Inrunner) або зовні (Outrunner) . Двигуни із зовнішнім ротором, як правило, мають менший момент інерції.
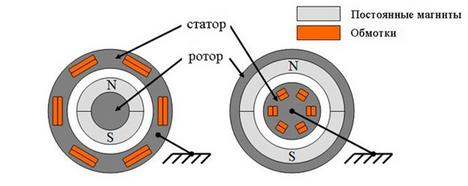
Рисунок 1 – Класифікація СДПМ по розташуванню ротора
2.2 По конструкції ротора
- Електродвигуни з явно вираженими полюсами
- Електродвигуни з неявно вираженими полюсами
Електродвигун з неявно вираженими полюсами має рівну індуктивність по поздовжній і поперечній осях Ld = Lq, тоді як у електродвигуна з явно вираженими полюсами поперечна індуктивність не дорівнює поздовжньої Lq != Ld [2].
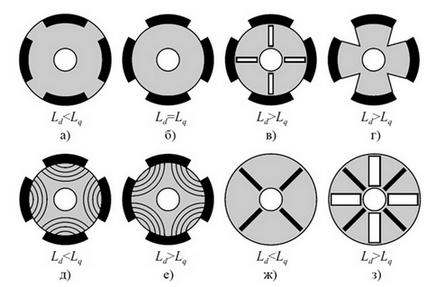
Рисунок 2 – Перетин роторів з різним ставленням Ld / Lq. Чорним позначені магніти. На рисунку д , е представлені аксіально-розшаровані ротори, на рисунку в і з зображені ротори з бар'єрами.
2.3 По розташуванню магнітів
- Синхронний двигун c поверхневої установкою постійних магнітів ( англ. SPMSM – surface permanent magnet synchronous motor )
- Синхронний двигун з вбудованими (інкорпорованими) магнітами ( англ. IPMSM – interior permanent magnet synchronous motor )
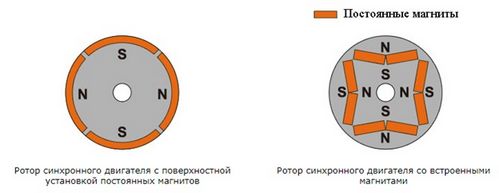
Рисунок 3 – Класифікація СДПМ по розташуванню магнітів
2.4 По конструкції статора
Залежно від конструкції статора синхронний двигун з постійними магнітами буває:
- З розподіленої обмоткою
- З зосередженої обмоткою
Розподіленої називають таку обмотку, у якій число пазів на полюс і фазу Q = 2,3, ..., k. Зосередженої називають таку обмотку, у якій число пазів на полюс і фазу Q = 1. При цьому пази розташовані рівномірно по окружності статора. Дві котушки, що утворюють обмотку, можна з'єднати як послідовно, так і паралельно. Основний недолік таких обмострум – неможливість впливу на форму кривої ЕРС [ 2 ].

Рисунок 4 – Зовнішні відмінності зосередженої і розподіленої обмострум СДПМ
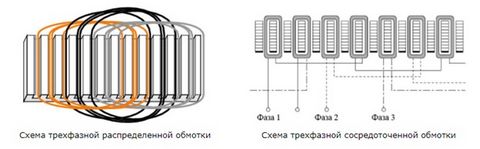
Рисунок 5 – Схемотіческіе відмінності зосередженої і розподіленої обмострум СДПМ
2.5 За формою зворотного ЕРС
Форма зворотнього ЕРС електродвигуна може бути:
- трапецеїдальних
- синусоїдальна
Форма кривої ЕРС в провіднику визначається кривої розподілу магнітної індукції в зазорі по колу статора. Відомо, що магнітна індукція в зазорі під явно вираженим полюсом ротора має трапеціїдальну форму. Таку ж форму має і наводиться в провіднику ЕРС. Якщо необхідно створити синусоидальную ЕРС, то полюсним наконечником надають таку форму, при якій крива розподілу індукції була б близька до синусоїдальної. Цьому сприяють скоси полюсних наконечників ротора [3].
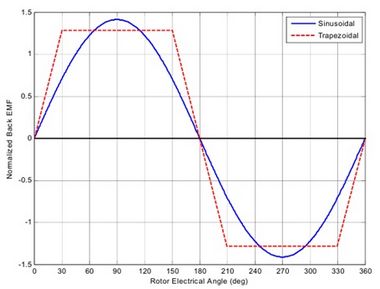
Рисунок 6 – Відмінності у формі зворотного ЕРС СДПМ
3. Алгоритми управління
Як розглянутого двигуна прийнятий СДПМ типу OUTRUNNER , з явно вираженими полюсами, поверхневої установкою магнітів, розподіленої обмоткою і трапецеидальной формою зворотного ЕРС. Подібні двигуни іноді називають безколекторними електродвигунами постійного струму (БКЕПТ) .
Алгоритми управління БКЕПТ / СДПМ з трапецеидальною зворотньою ЕРС можна розділити на:
- Управління без зворотного зв'язку (актуальний тільки для застосувань де навантаження зараннее відомо і не змінюється в процесі роботи та низькі вимоги до надійності)
- Управління з застосуванням датчиків положення ротора (датчики Холла, енкодери, тахогенератори і ін.)
- Бездатчикового управління, при якому для ідентифікації положення ротора використовується:
- Вимірювання зворотного ЕРС на одній з фаз
- Аналіз відгуку на ВЧ сигнал для двигунів з Lq != Ld (HFI method)
Можна не враховувати форму зворотньої ЕРС двигуна і застосувати алгоритми управління для СДПМ з синусоїдальної зворотного ЕРС (скалярний, полеорентірованное, пряме керування моментом) при цьому пульсації моменту можуть досягати 17% [ 2 ].
Бездатчикового управління, в залежності від способу вимірювання зворотної ЕРС можна розділити на:
- Пряме (Direct) вимір зворотного ЕРС (визначення моменту переходу ЕРС через 0 за який приймається напруга середньої точки. Через застосування ШІМ обов'язкові подільники напруги і фільтри низьких частот)
- Непряме (Indirect) вимір зворотного ЕРС (Так як фільтрація сигналу при прямому вимірі вносить затримку на високих швидкостях а смуга пропускання фільтра призводить до загасання сигналу на низьких швидкостях застосовують непрямі методи визначення зворотної ЕРС)
- Інтегрування зворотного ЕРС
- Інтегрування 3-й гармоніки напруги
При використанні СДПМ з трапецеидальной зворотного ЕРС в якості приводу гвинтомоторної групи рекомендується застосовувати тільки бездатчикового алгоритми управління тому наявність датчиків істотно знижує надійність системи через важкі умови експлуатації (вібрації, високі динамічні навантаження, висока вологість і велика кількість бруду і пилу), що є неприпустимим. Однак, алгоритм управління по датчикам Холла є найбільш наочним для розуміння фізичних принципів управління СДПМ та буде так само розглянуто як приклад.
Одним з недоліків бездатчикового управління СДПМ є проблема запуску і роботи на низьких швидкостях коли амплітуда зворотної ЕРС порівнянна з амплітудою шумів від датчиків. Варто зауважити, що для механізмів з вентиляторним навантаженням ця проблема не критична тому немає необхідності розвивати великий момент на нульових і низьких оборотах. Для вирішення цієї проблеми використовують такі методи:
- Бездатчикового пуск:
- Початкове вирівнювання ротора шляхом завдання фіксованого вектора струму безпечної аплітуди
- Очікування позиціонування ротора відповідно до вектором струму статора
- Розгін без зворотного зв'язку до моменту коли величина зворотної ЕРС стане достатньою для визначення положення ротора
- Визначення початкового положення ротора в зупиненому стані:
- На кожну з фаз по черзі подаються короткі імпульси.
- Аналізується відгук на кожен з імпульсів щодо середньої точки
- За різницею відгуків визначається початкове положення ротора
3.1 Управління по датчикам Холла
Для оцінки стану ротора в корпус двигуна вбудовуються три датчика Холла. Датчики встановлені під кутом 120 ° по відношенню один до одного. За допомогою даних датчиків можливо виконати 6 різних перемикань. Комутація фаз залежить від стану датчиків Холла. Подача напруги живлення на обмотки змінюється після зміни станів виходів датчиків Холла. При правильному виконанні синхронізованою комутації крутний момент залишається приблизно постійним і високим.
З метою спрощеного опису роботи трифазного БКЕПТ (СДПМ з трапеціїдальной зворотного ЕРС) розглянемо тільки його версію з трьома обмотками. Як було показано раніше, комутація фаз залежить від вихідних значень датчиків Холла. При коректної подачі напруги на обмотки двигуна створюється магнітне поле і ініціюється обертання. Найбільш поширеним і простим способом управління комутацією, який використовується для управління БКЕПТ, є схема включеніяотключенія, коли обмотка або проводить струм, або ні. В один момент часу можуть бути запитані тільки дві обмотки, а третя залишається відключеною. Підключення обмострум до шин живлення викликає протікання електричного струму. Даний спосіб називається трапецеидальной комутацією або блокової комутацією [ 5 ].
Для управління БКЕПТ використовується силовий каскад, що складаються з 3 півмилі. Схема силового каскаду показана на рисунку 7
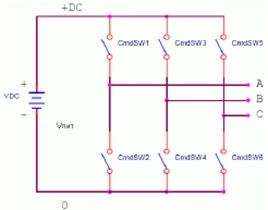
Рисунок 7 – Силовий каскад
За лічених значень датчиків Холла визначається, які ключі повинні бути замкненими.
Таблиця 1 – Комутація ключів за годинниковою стрілкою.
| Значення датчиків Холла (Hall_CBA) | фаза | ключі |
|---|---|---|
| 101 | A-B | SW1, SW4 |
| 001 | A-C | SW1, SW6 |
| 011 | B-C | SW3, SW6 |
| 010 | B-A | SW3, SW2 |
| 110 | C-A | SW5, SW2 |
| 100 | C-B | SW1, SW4 |
Від сили магнітного поля залежить потужність і частота обертання двигуна. Регулювати частоту обертання і крутний момент двигуна можна за рахунок зміни струму через обмотки. Найбільш поширений спосіб управління струмом через обмотки є управління середнім струмом. Для цього використовується Широтноімпульсна модуляція (ШІМ), робочий цикл якої визначає середнє значення напруги на обмотках, а, отже, і середнє значення струму і, як наслідок, частоту обертання. Швидкість може регулюватися при частотах від 20 до 60 кГц. Обертається поле трифазного, триобмоткового БКЕПТ показано на рисунку 8
Рисунок 8 – Сходи комутації i обертання поля
(анімація: 6 кадрів, 10 циклів, 63.7 кілобайт)
Процес комутації створює обертове поле. На ступені 1 фаза А підключається до позитивної шині живлення ключем SW1, фаза В підключається до загального за допомогою ключа SW4, а фаза С залишається непідключеної. Фазами А і В створюються два вектора магнітного поструму (показані червоною і синій стрілками, відповідно), а сума цих двох векторів дає вектор магнітного поструму статора (зелена стрілка). Після цього ротор намагається слідувати магнітному поструму. Як тільки ротор досягає деякого положення, в якому змінюється стан датчиків Холла зі значення 010
на 011
, Виконується відповідним чином перемикання обмострум двигуна: фаза В залишається незапітанной, а фаза З підключається до загального. Це призводить до генерації нового вектора магнітного поструму статора (ступінь 2). Якщо слідувати схемі комутації, показаної на рисунку 8 і в таблиці 1, то отримаємо шість різних векторів магнітного поструму, відповідних шести ступеням комутації. Шість ступенів відповідають одному обороту ротора. [ 5 ]
3.2 Управління по прямому вимірюванню зворотного ЕРС
Переважна більшість контролерів (ESC) для приводів гвинтомоторної групи працюють за наведеним нижче алгоритмом або використовують інший без принципових відмінностей.
На рисунку 9 показані осцилограми трапецеидальной зворотного ЕРС і відповідні напруги управління 3фазним БКЕПТ. На кожному ступені комутації, обмотка однієї фази підключається до позитивного напруги живлення, інша – до негативного, а третя залишається непідключеної. Зворотній Е.Д.С. непідключеної фази в результаті перетинає нуль при перетині середнього значення позитивного і негативного напруги. Перетину нуля відзначені на рисунку 9, як ПН
. Перетин нуля виникає завжди в центрі між двома комутаціями. На постійній швидкості або повільно змінюється швидкості період часу від однієї комутації до перетину нуля і час від перетину нуля до наступної комутації рівні. Це використовується в якості основи в даній реалізації пристрою управління без використання датчиків.
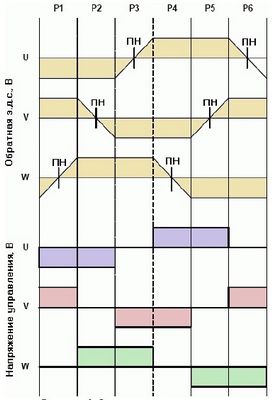
Рисунок 9 – Осцилограми сигналів
Частота обертання / крутний момент двигуна управляються за допомогою широтноімпульсної модуляції (ШІМ). З метою виконання надійних вимірювань в умовах випромінювання з боку ШІМ підвищеного рівня шуму важливо розуміти роботу ШІМ і її взаємодія з аналоговоціфровим перетворювачем. ШІМ використовується в так званому режимі фазової корекції. В даному режимі лічильник працює в двох напрямках, що робить вихід ШІМ симетричним в межах одного періоду ШІМ. Крім того, сравниваемое значення, яке визначає робочий цикл ШІМвихода, буферизується з метою неможливості його поновлення всередині циклу ШІМ. На рисунку 2 показано співвідношення між значенням лічильника, порівнюваним значенням і ШІМвиходом. Кожен період ШІМ на рисунку виділено пунктирними лініями. На рисунку також показується, що переповнення таймера виникає при досягненні таймером нуля. Дана подія може використовуватися для автоматичного запуску перетворення АЦП. Якщо значення робочого циклу ШІМ дуже мало, то є точка, в якій ШІМвиход буде стабільним протягом тривалого часу. Це використовується в цілях гарантування оцифровки напруги непідключеної фази в умовах низьких шумів з боку ШІМ.
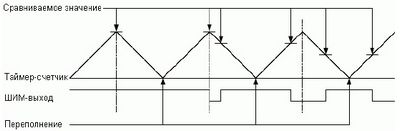
Рисунок 10 – Генерація ШІМ
Перетин нуля виникає, коли Е.Д.С. відключеної фази перетинає рівень напруги, що дорівнює середньому значенню напруги двох ліній живлення. В даних рекомендаціях щодо застосування покладається, що негативне живлення прийнято за загальну ланцюг. Це означає, що рівень перетину нуля дорівнює половині напруги живлення двигуна. Залежність цього рівня від напруги живлення двигуна робить неприйнятним використання фіксованого порога для визначення перетину нуля. Замість цього, в якості джерела опорного напруги АЦП доцільно використовувати напруга живлення двигуна (або його отмасштабовані в напрямку зменшення версія). Перед подачею до АЦП напруга живлення двигуна необхідно відфільтрувати. Для цих цілей можна використовувати схему ДН / ФНЧ. Коефіцієнт розподілу вибирається таким чином, щоб вихідна напруга була в необхідних межах АЦП, між 1В і AVCC. Напруги 3 фаз повинні бути підключені до входів АЦП за допомогою трьох схем ДН / ФНЧ. Фільтри повинні мати той же коефіцієнт передачі, що і фільтр опорного напруги АЦП. Це дозволить використовувати весь діапазон перетворення АЦП. Фільтр низьких частот повинен забезпечувати якомога повнішу фільтрацію високочастотного шуму, але при цим не повинен вносити істотних затримок сигналу зворотного ЕРС.
Щоб зрозуміти, як реалізована комутація, корисно розглянути тимчасову діаграму подій, які виникають між двома комутаціями. На рисунку 11 показано в деталях осциллограмма напруги непідключеної фази між двома комутаціями [ 6 ].

Рисунок 11 – Детальна тимчасова діаграма комутації
3.3 Управління за непрямим виміру зворотного ЕРС
Так як схема прямого виміру зворотного ЕРС має ряд недоліків:
- Фільтрація сигналу при прямому вимірі вносить затримку на високих швидкостях а смуга пропускання фільтра призводить до загасання сигналу на низьких швидкостях.
- Моменти комутації можуть
плавати
в динамічних режимах (розгін / гальмування)
Буде розглянуто схема непрямого вимірювання ЕРС на основі інтегрування зворотного ЕРС. Алгоритм непрямого визначення зворотної ЕРС відрізняється від прямого тільки програмної реалізацією і ніяк не впливає на схемотехнику (вона ідентична описаної в п. 3.2.) При прямому способі вимірювання ЕРС визначається момент переходу через 0 після проводиться витримка часу (timing) яка залежить від поточної швидкості і індуктивності двигуна (на високій швидкості комутацію потрібно здійснювати раніше, щоб струм встиг досягти максимального значення в потрібний момент) після інвертор переходить до наступного стану. Головна проблемма даного методу в тому, що через наведені вище недоліків витримка часу залежить від швидкості і схильна до впливу шумів.
Непрямий (Indirect) спосіб працює наступним чином:
- Визначається момент переходу через 0 як при прямому способі.
- Замість витримки часу, АЦП мікроконтролера починає робити вибірки через фіксовані інтервали і підсумувати отримані результати.
- Коли сума вибірок АЦП стане рівною або більше ніж вибраних користувачем уставка, відбувається скидання інтегратора і перемикання інвертора до наступного стану.
Основна перевага даного способу в меншій чутливості до шумів і адаптації до зміни швидкості. Дане твердження засноване на тому, що площа під прямий між точками перетину нуля і уставки спрацьовування (утворює форму трикутника) не змінюється при розгоні / гальмуванні, не залежить від швидкості і затримка, в електричних градусах, між визначенням переходу через 0 і переходом до наступного стану інвертора завжди постійна. Оскільки при низькій швидкості обертання ротора величина ЕРС мала і інтегратор накопичує потрібну величину довше а на високій ЕРС вище і відповідно інтегратор досягає значення уставки раніше.
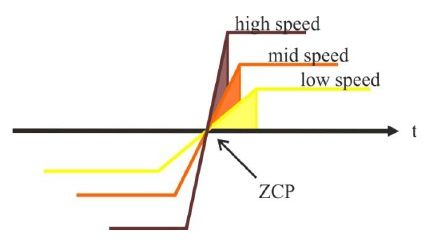
Рисунок 12 – Ділянки інтегрування зворотного ЕРС
4. Опис апаратної частини
4.1 Силова частина
Типова структурна схема пристрою представлена на рисунку 4.1 і включає в себе наступні елементи:
- Інвертор (трифазна мостова схема на N-канальних МОН транзисторах)
- Драйвер інвертора
- Датчики зворотного ЕРС (подільники напруги фазних висновків і ФНЧ)
- Датчики струму
- Датчик напруги ланки постійного струму
- Джерело живлення мікроконтролера
- Мікроконтролер
Так само в пристрої, в обов'язковому порядку, повинні бути присутніми комунікаційний інтерфейс, налагоджувальні висновки. Кожен структурний елемент має соответствующею схему включення, повна принципова схема пристрою представлена в дипломній роботі.
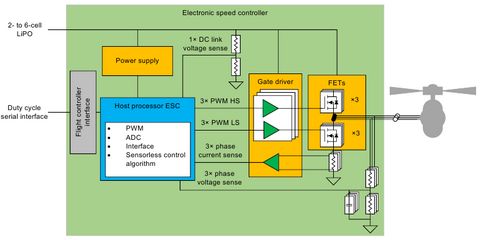
Рисунок 13 – Структурна схема контролера
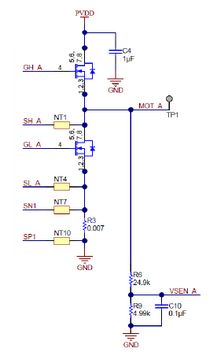
Рисунок 14 – Схема стійки інвертора
4.2 Цільова платформа
В якості керуючого пристрою для контролера (ESC) був обраний мікроконтролер STM32F103 короткі технічні характеристики якого представлені в таблиці 2.
Таблиця 2 – Характеристики обраного мікроконтролера.
| параметр | значення |
|---|---|
| ядро | ARM Cortex M3 |
| тактова частота | до 72МГц |
| FLASH-пам'ять | 32 ... 128кб |
| SRAM-пам'ять | до 20Кб |
| інтерфейси | SPI, I2C, USART, USB 2.0, CAN |
| АЦП | до двох 12 біт / 16 каналів |
| таймери | 7, включаючи 1 motor control |
| струм споживання | до 2мкА в режимі очікування |
| температурний діапазон | -40 ° C ... 125 ° С |
| типи корпусів | VFQFPN36, LQFP48, LQFP64, LQFP100 |
| напруга живлення | 2 ... 3,6 |
Даний мікроконтролер був обраний в якості цільової платформи завдяки наступним перевагам:
- Наявність швидкого, гнучко конфiгуруэмого, motor control таймера який має 4 регістра порівняння / каналу ШІМ з комплементарними парами і можливістю апаратної генерації мертвого часу між ними. Обгрунтування: Для застосовуваних з даними ESC двигунами необхідна висока частота ШІМ (більше 20 КГц) для збереження режиму безперервних струмів так як вони мають дуже малу електромагнітну постійну часу.
- Два швидких (1.15 мкс при Тактуваннi 72 МГц), 12-бітних АЦП з можливістю одночасної вибірки по декількох каналах. Обгрунтування: Для зниження впливу шумів, вибірки АЦП з різних датчиків одного типу необхідно проводити одночасно.
- Достатня продуктивність для реалізації складних алгоритмів керування. Обгрунтування: Необхідно забезпечити можливість реалізації поле орієнтованого алгоритму управління в бездатчикового режимі.
- Різноманітність комунікаційних інтерфейсів. Обгрунтування: Різні польотні контролери можуть посилати керуючий сигнал на ESC по різних прострумолах.
- Низька ціна (порівнянна з 8-бітними микроконтроллерами).
Висновок
Застосовувані в масовому виробництві контролери (ESC) приводів гвинтомоторних груп використовують не оптимальні з точки зору виробленої тяги на одиницю споживаного струму і, як наслідок, з точки зору енерго ефективності алгоритми управління двигунами. Більш того, високі пульсації моменту та тяги доповнені зовнішніми збуреннями можуть привести до втрати стійкості, зайвим вібрацій і суттєво ускладнять завдання стабілізації мульти роторної системи. Застосування алгоритмів непрямого визначення зворотної ЕРС якого алгоритму поле орієнтованого управління дозволить позбавиться від вище описаних недоліків або істотно знизить їх вплив на систему.
Список джерел
- Markus Lindegger. Economic viability, applications and limits of efficient permanent magnet motors.– Switzerland: Swiss Federal Office of Energy, 2009
- Design and Prototyping Methods for Brushless Motors and Motor Control.– MIT, 2010
- Синхронные двигатели с постоянными магнитами. //
Инженерные решения
Режим доступу: Инжиниринговая компанияИнженерные решения
- Калькулятор тяговооруженности мультироторных систем. //
eCalc
Режим доступу: Интернет ресурсeCalc
- AVR492: Управление бесколлекторным электродвигателем постоянного тока с помощью AT90PWM3.– Atmel
- AVR444: Управление трехфазным бесколлекторным электродвигателем постоянного тока без датчиков.– Atmel
- STM32F103 Datasheet: DocID13587 Rev 17.– ST Microelectronics, 2015
- STM32F103 Reference manual: DocID13902 Rev 16.– ST Microelectronics, 2015
- Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends.– Department of Signal Theory, Communications and Telematic Engineering, University of Valladolid(UVA), 47011 Valladolid, Spain, 2010
- Sensorless Detection of Rotor Position of PMBL Motor at Stand Still / Roustiam Chakirov, Yuriy Vagapov, and Andreas Gaede / WCECS 2007, October 24-26, 2007, San Francisco, USA