Аннотация
Шичанин Л.В., Лавшонок А.В. РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ СТАБИЛИЗАЦИЕЙ ПОЛОЖЕНИЯ ПОДЪЕМНИКА УСТАНОВКИ СУХОГО ТУШЕНИЯ КОКСА(УСТК). Рассмотрена система управления подъемником обеспечивающая стабилизацию перекоса платформы при неравномерном распределении нагрузки.
В настоящее время охлаждение кокса выполняется двумя способами: сухое и мокрое тушение. Для технологии сухого тушения используется установка сухого тушения кокса(УСТК) которая имеет в своем составе подъемник выполняющий функцию транспортировки кокса из коксовых печей в камеры тушения.
На текущий момент система управления подъемником, состоящая из платформы закрепленной на 4 лебедки движением которых управляют 4 независимых привода (АДКЗ – редуктор - барабан), управляется в ручную от командоконтроллера оператора и не имеет автоматического режима, встроенных систем защиты и стабилизации ,что может привести к возможным перегрузкам отдельных двигателей и перекосу платформы.
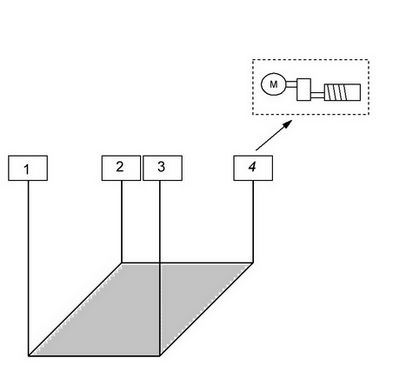
Рисунок 1 – Функциональная схема подъемника УСТК
Целью данного проекта является разработка системы управления подъемником для обеспечения согласования их перемещения и устранения возможных перекосов платформы и перегрузок двигателей под действием неравномерно распределенной нагрузки.
Для этого была построена обобщенная модель платформы с распределением нагрузки на 5 условных точек приложения сил (1 центральная и 4 угловых) а тяговые усилия приводов на канатах на 4 точки, с учетом того ,что упругостями канатов мы пренебрегаем.
На рисунке F1,F2,F3,F4 – силы тяги двигателей, Fa,Fb,Fc,Fd,F0 – точки распределения массы на платформе.
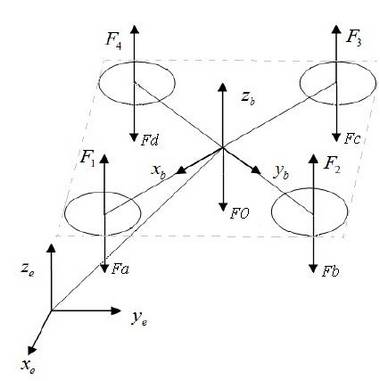
Рисунок 2 – Распределение сил на платформе
Для данной модели были составлены уравнения равновесия системы:
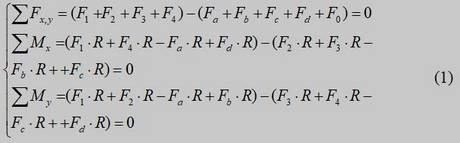
Данная система из 3-х уравнений описывает зависимость нагрузки на канаты или необходимый момент создаваемый каждым из приводов от нагрузки распределенной по 5 условным точкам платформы.
Были рассмотрены следующие варианты реализации системы стабилизации:
- УПРАВЛЕНИЕ В ФУНКЦИ ТОКА. Определение углов отклонения платформы при помощи измерения токов статора(нагрузки на привод) каждого из двигателей, расчетом просадки скорости соответствующей данной нагрузке и введением соответствующих корректирующих воздействий.
- УПРАВЛЕНИЕ В ФУНКЦИИ СКОРОСТИ. Определение углов отклонения платформы при помощи установки датчиков скорости.
- УПРАВЛЕНИЕ ПРИ ПОМОЩИ КОНЦЕВЫХ ВЫКЛЮЧАТЕЛЕЙ. Определение углов отклонения платформы при помощи установки 4-х концевых выключателей на уровне меньшем чем уровень критического перекоса платформы при максимально возможной разности нагрузок на привода, измерения времени между срабатыванием выключателей и введением соответствующих корректирующих воздействий.
- УПРАВЛЕНИЕ ПРИ ПОМОЩИ ГИРОСКОПА. Определение углов отклонения платформы при помощи установки гироскопа на дне платформы.
Краткий анализ предложенных способов:
- Варианты 1 и 2 позволяют определять отклонение на всем интервале движения платформы.
- Так как все двигатели одинаковой мощности имеют мелкие различия в своих характеристиках (из-за технологических особенностей производства) то вариант 1 не позволяет определять отклонение платформы с достаточной точностью.
- Вариант 2 имеет более высокую стоимость по сравнению с остальными и не всегда может быть реализован по технологическим условиям.
- Варианты 1 и 2 не учитывают упругостей канатов, что отрицательно влияет на точность измерений и стабильность системы в целом.
- Вариант 4 требует установку шины питания и передачи данных для гироскопа.
- Вариант 3 относительно дешев, прост в реализации и имеет высокую надежность( точность не зависит от условий окружающей среды ).
Из всех предложенных был выбран вариант 3 так как недостатки других способов являются весьма критичными для реализации а данный способ помимо перечисленных достоинств позволяет получать обратную связь непосредственно от объекта управления.
Описание выбранного метода: УПРАВЛЕНИЕ ПРИ ПОМОЩИ КОНЦЕВЫХ ВЫКЛЮЧАТЕЛЕЙ.
В шахте в которой перемещается платформа будут установлены 2 комплекта концевых выключателей из 4х штук в каждом (по 1 на каждую сторону) которые при помощи системы управления будут фиксировать время достижения каждой из сторон платформы контрольной точки и определять величину и угол перекоса платформы с последующим вводом корректирующего воздействия.
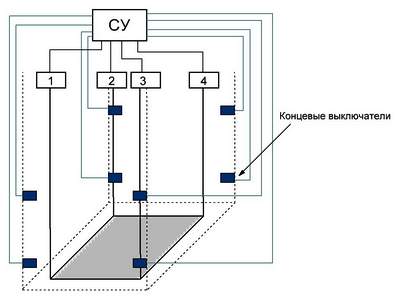
Рисунок 3 – Структурная схема системы управления подъемника УСТК
Алгоритм функционирования устройства управления представлен на рисунке 5:
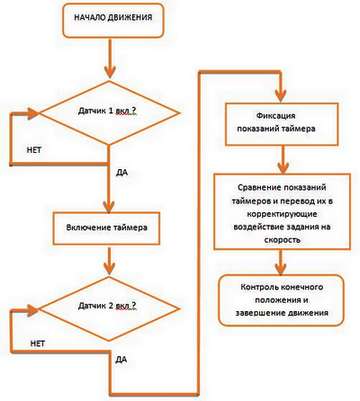
Рисунок 4 – Алгоритм работы системы управления
Моделирование производилось в графической среде имитационного моделирования Simulink(Matlab). Была составлена математическая модель приводной части подъемника и получены графики на которых отчетливо видно насколько изменяется скорость и перемещение каждой из сторон платформы в зависимости от нагрузок на двигатели которые в нашем случае выражены в виде неравномерно распределенной массы на платформе.
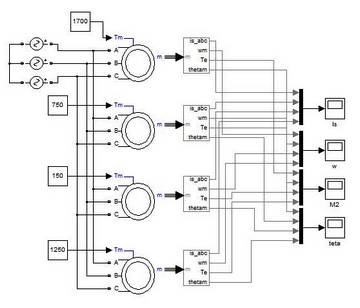
Рисунок 5 – Математическая модель силовой части подъемника
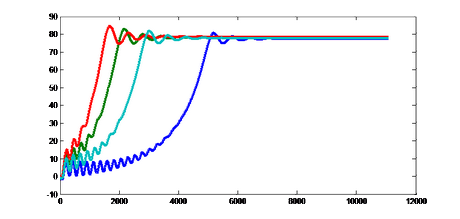
Рисунок 6 – Графики скорости двигателей
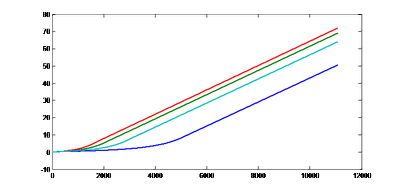
Рисунок 7 – Графики углового перемещения двигателей
Получена модель силовой части подъемника установки сухого тушения кокса. В силовой части использованы модели асинхронного двигателя с короткозамкнутым ротором. В ходе моделирования получены графики переходных процессов наблюдаемых в скорости и угловом перемещении. Стабилизация углового положения является сложной и интересной задачей которую можно решить множеством способов но при этом необходимо учитывать технологические особенности объекта. Системы автоматического управления движением с обратными связями широко используются в современных машинах как одно из наиболее эффективных средств повышения точности и быстродействия.
Список использованной литературы
1. А. C. 1965464 СССР. Устройство для управления процессом разгрузки кокса из камер УСТК / М. А. Юрченко, О. Н. Панкратьев // Открытия. Изобретения. 1984. № I, с. 231.
2. SimPowerSystems: Моделирование электротехнических устройств и систем в Simulink / И.В. Черных // Режим доступа: ЦИТМ Экспонента