Замкнутые системы управления электроприводом с двигателем постоянного тока последовательного возбуждения на основе нейронных сетей
Авторы: В.В. Войтенко, Ю.Н. Кутовой
Источник: Вестник Харьковского политехнического университета, VII Университетская научно-практическая студенческая конференция магистров, 2014, с. 150-151
Двигатели постоянного тока последовательного возбуждения широко применяются в различных машинах и механизмах. Однако, при прямом пуске электродвигателя мощностью выше 1 кВт ток, протекающий через обмотку якоря, достигает больших значений, что приводит либо к пробою изоляции обмотки, либо к короткому замыканию. Вследствие этого, электродвигатель выходит из строя. Для ограничения значений токов обмоток якоря и возбуждения при пуске двигателя на допустимом значении, как правило, применяются разомкнутые релейно-контакторные схемы, которые предоставляют возможность пуска электродвигателя в функции времени, тока или скорости. Однако, выше описанный способ запуска электродвигателей, имеет ряд недостатков: невозможно поддерживать заданную скорость при изменении момента нагрузки; снижается надежность работы всего электропривода из-за невысокой надежности релейно-контакторной аппаратуры; повышается расход электроэнергии из-за добавочных потерь на сопротивлениях включаемых последовательно с обмоткой якоря, а также в катушках реле; увеличиваются эксплуатационные расходы, расходы на ремонт и др.
Поэтому актуальной задачей является создание замкнутой системы управления такими электродвигателями. Такое управление требует введения внешних обратных связей по всем основным координатам электропривода. Устранить вышеуказанный недостаток можно введением в систему такого нелинейного регулятора, который имел бы на входе информацию по легко измеряемым одной или нескольким координатам и обеспечивал бы требуемое управление электроприводом. К таким регуляторам могут быть отнесены нейроконтроллеры [1-3].
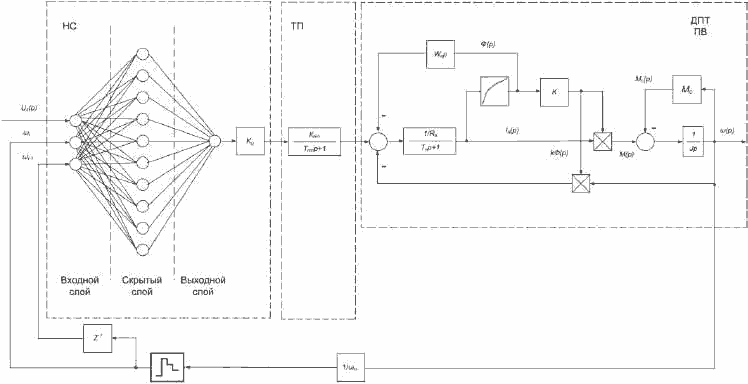
В ходе исследования решена задача построения замкнутой нейросетевой системы управления двигателем постоянного тока последовательного возбуждения. Структурно-алгоритмическая схема такой нейросетевой системы управления приведена на рис. 1. Переходные процессы в двигателе постоянного тока последовательного возбуждения с нейросетевой системой управления представлены на рис. 2.
С помощью нейронной сети удалось построить замкнутую систему управления двигателем постоянного тока последовательного возбуждения.
Как показало моделирование системы управления максимальное значение якорного тока по отношению к номинальному составляет примерно 2,5, что является безопасным режимом работы двигателей такого типа.
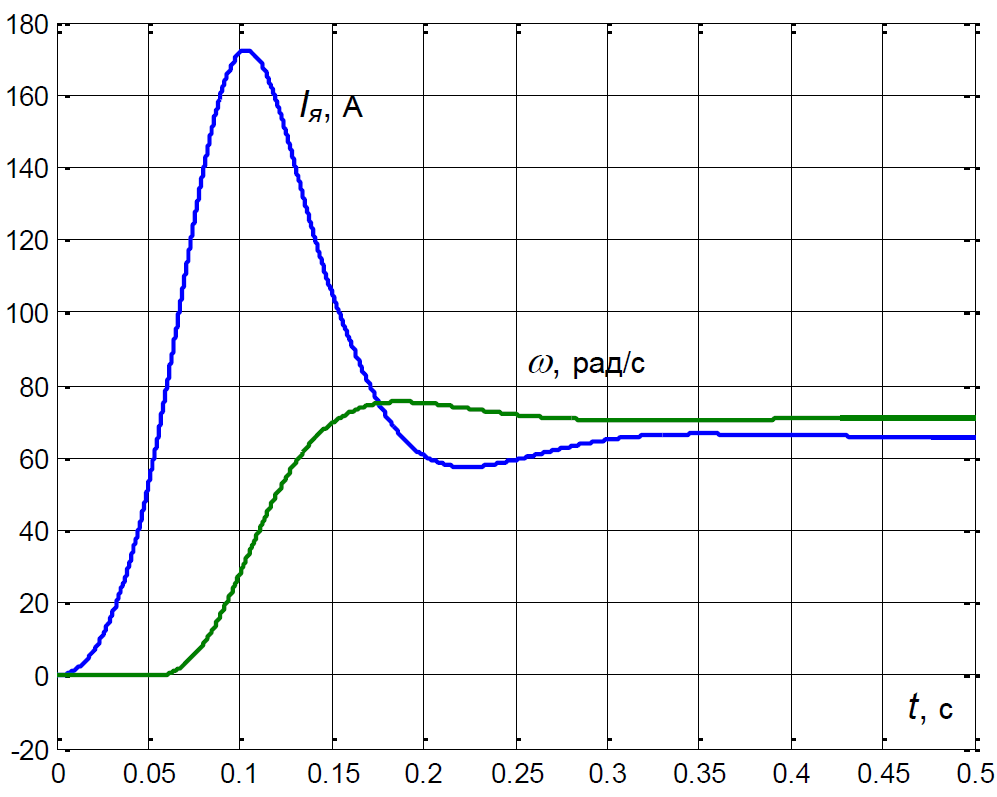
При этом, максимальное значение скорости превышает заданное на 6,7 %. За счет применения замкнутой системы управления также удалось повысить быстродействие системы примерно в 2 раза, по сравнению с быстродействием системы, реализованной при помощи релейно-контакторной аппаратуры.
Приведенное выше решение задачи управления двигателем постоянного тока последовательного возбуждения на базе нейронных сетей является новым и весьма перспективным способом регулирования электромеханическими объектами в современных условиях с требуемыми параметрами качества переходных процессов.
Список литературы:
- De Jong K. A. Genetic Algorithms: A 10 Year Perspective //In: Procs of the First Int. Conf. on Genetic Algorithms, 1985. – pp. 167 – 177.
- Rumelhart D. E., Hinton G. E., Williams R. J. Learning representation by back–propagating errors // Nature. – 1986. – vol. 323. – pp. 533 – 536.
- Holland J. H. Adaptation in natural and artificial systems. An introductory analysis with application to biology, control, and artificial intelligence. – London: Bradford book edition, 1994. – 211 p.