Аннотация
У статті наведено результати дослідження системи управління електроприводом з плавним регулюванням демпфірування пружних механічних коливань . Показано, що найбільш ефективне усунення коливальних процесів досягається формуванням коефіцієнта демпфірування згідно з сигналом заданої швидкості.
Введение
Ряд промышленных установок содержат упругие механические звенья с сосредоточенными или распределенными параметрами (шахтные подъемные и конвейерные установки, различные грузоподъемные краны, промышленные манипуляторы и др.). в таких системах, как правило, возникают низкочастотные упругие колебания, которые отрицательно влияют на прочность и долговечность соответствующих механизмов. Кроме того, в случае позиционных электроприводов прак тически становятся невозможным реализация точного останова рабочего органа в заданном положении. В этой связи важной проблемой является обеспечение гашения колебаний в переходных режимах и их исключение после останова машины, используя возможности системы управления электроприводом
Анализ предыдущих исследований
Исследованию промышленных установок с упругими звень ями как сложных электромеханических систем по священо большое количество работ, в которых рассматриваются вопросы, главным образом, относящиеся к определению динамических нагрузок в отдельных звеньях. Уделялось внимание также созданию позиционных систем управления, учитывающих динамику упругой трансмиссии [1]. Известны работы, направленные на построение оптимальных по динамическим нагрузкам систем управления механизмами с постоянной и переменной частью упругих механических колебаний [2, 3]. В этих работах устранение колебаний осуществлялось соответствующим демпфированием движущего момента в зависимости от периода собственных колебаний упругой системы. Результаты выполненных исследований с точки зрения их практического применения нельзя распространить на любые системы с упругими связями, так как базировались или на постоянную частоту колебаний или на учет их изменения в процессе эксплуатации.
Цель работы
Использование плавного демпфирования упругих колебаний в переходных режимах, обеспечивающие оптимальные динамические режимы при высокой точности отработки заданных диаграмм скорости и положения
Материал и результат исследования
Вопросы плавного изменения демпфирования известны из теории автоматического управления, в частности, из раздела «нелинейные законы управления» [4].
Важным отличием нелинейных законов от линейных является то, что они придают системе управления принципиально новые свойства. Если при линейном законе всегда используется сигнал, пропорциональный входной переменной или ее производной и т.д., то при нелинейном законе может существенно изменятся и сам характер действия системы управления на объект в зависимости от величины входного воздействия. Другими словами, если для линейной системы изменение отклонения - это изменение только масштаба, то в нелинейной системе при этом может существенно изменятся и форма процессов, вплоть до принципиальных качественных изменени й картины процессов. Эти свойства нелинейных законов следует максимально использовать в технике автоматического управления и регулирования.
Частным случаем автоматической системы с функциональным нелинейным законом управления является система с плавным демпфированием колебаний. Система с коэффициентом демпфирования, изменяющимся пропорционально ошибке регулирования приведена на рис. 1. Улучшение переходного процесса достигается при помощи введения в систему дополнительной обратной связи с изменяю щимся коэффициентом демпфирования в течение переходного процесса.
При использовании такой обратной связи в начале переходного процесса при больших отклонениях системы e=Xвх-Хвых - коэффициент демпфирования мал. По мере приближения выходной величины Хвых к действительному значению коэффициент демпфирования увеличивается, так как увеличи вается разность сигналов (β - α). Сигнал α является сигналом линейной отрицательной обратной связи; β - реализуется перемножением двух переменных:K1e и K3*dХвых/dt
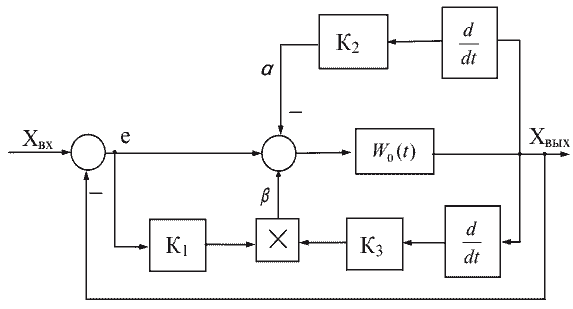
Рисунок 1 – Система с плавным изменением демпфирования по ошибке регулирования.
Уравнение динамики системы имеет вид:

Приведенную на рис. 1 схему системы управления нельзя отнести к универсальной, так как ошибка регулирования е не всегда может быть использована для формирования коэффициента демпфирования. Например, в системе подчиненного регулирования с ПИ-регулятором скорости ошибка регулирования будет близкой к нулю, однако колебания упругого момента будут. Поэтому более целесообразным является использование не ошибки регули рования, а сигнал нарастания (уменьшения) управляющего сигнала.
На рис. 2 приведена типовая система подчиненного управления электроприводом с задающей моделью (ЗМ) и двухмассовой упругой механической системой. Регулятор скорости (PC) и регулятор тока (РТ) приняты пропорционально-интегральными. В качестве электродвигателя (Д) принят двигатель постоянного тока независимого возбуждения с тиристорным преобразователем мощности (ТП). J1J2 – соответственно моменты инерции ведомой и ведущей масс; CУ – коэффициент упругости, СДф – коэффициент демпфирования колебаний.
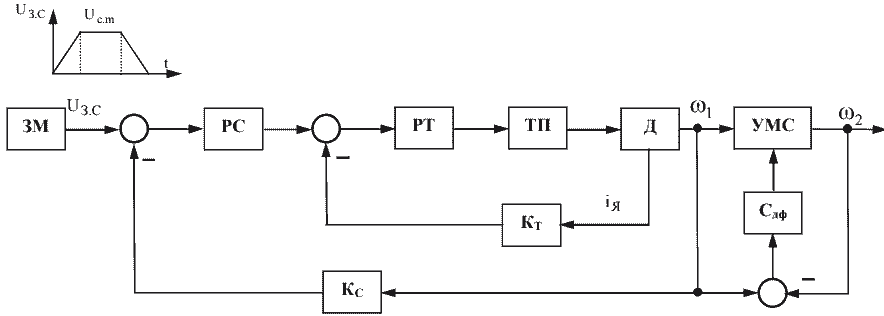
Рисунок 2 – Simulink-модель системы управления с плавным демпфированием упругих колебаний.
Известно, что при определенном значении СДф колебаний в системе не будет. Однако в электромеханических системах с упругими звеньями типа стальных канатов, упруго-вязких конвейерных лент реализовать нельзя, так как нельзя осуществлять подачу сигнала, пропорционального СДф.
Управляющим воздействием на систему принят сигнал UЗ.С , пропорциональный заданной диаграмме скорости.
Современые технические средства позволяют контролировать скорости и перемещения сосредоточенных масс. Поэтому целесообразно сигнал, пропорциональный разности скоростей ведущей (ω1), и ведомой (ω2) масс, подавать на один из входов системы управления, например, на вход регулятора тока
В принятой системе подчиненного регулирования передаточные функции регуляторов тока и скорости равны:

передаточная функция тиристорного преобразователя

Передаточная функция замкнутого контура тока

Коэффициент пропорциональности тока (ЭДС) Cд = 2,63; моменты инерции масс: J1 = 23; J1 = 4;6 параметры упругого звена: CУ = 60; СДф = 100.
Задающая модель (ЗМ) формирует два управляющих воздействия, пропорциональных заданным диаграммам скорости и положения (в случае позиционного электропривода) при ограничениях максимальной скорости, ускорения и положения. Основным входным воздействием является разность сигналов

где UПm- сигнал заданного положения; UП – текущее (контролируемое) перемещение; UПа – расстояние до конечного положения рабочего органа с момента начала замедления.
Таким образом, замедление начинается с момен та равенства нулю ΔUЗ причем положение и скорость контролируются на всем периоде замедления благодаря уменьшению до нуля сигнала UП.a.
Плавное увеличение коэффициента демпфирования осуществляется пропорционально изменению сигнала заданной скорости в период разгона и замедления.
Функциональная схема устройства формирования коэффициента демпфирования (УФКД) представлена на рис. 3. На вход функционального преобразователя (ФП) подается сигнал заданной скоро сти UСЗ , а управляющий сигнал ΔUЗ , определяющей начало замедления системы определяется автоматически в ФП. Выходной сигнал ФП, изменяю - щийся от 0 до 1 перемножается с максимальным значением коэффициента демпфирования Cдф.m (штриховой линией показана диаграмма ОАВС сигнала заданной скорости). В точке В сигнал демпфирования снижается до нуля и начинает увеличиваться до максимального значения согласно диаграмме скорости и к концу рабочего цикла KДф достигает максимального значения СДф.
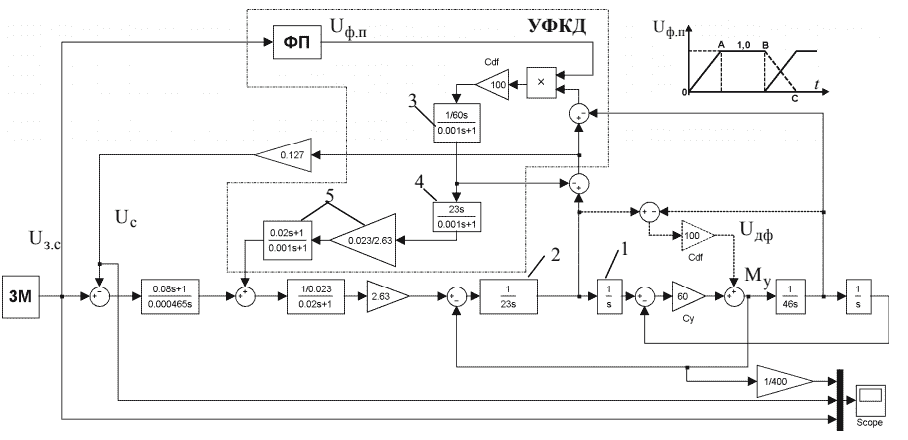
Рисунок 3 – Simulink-модель системы управления с плавным демпфированием упругих колебаний.
Для реализации такого режима с использованием системы управления согласно правилам преобразования структурных схем сигнал UДф=(ω1-ω2)СДф - переносится на вход регулятора тока (исходная схема включения демпфирующего элемента показана на рис. 3 штриховыми линиями). Перенос воздействия UДф через интегрирующие звенья 1 и 2 реализован соответственно блоками 3 и 4, а через передаточную функцию замкнутого контура тока и коэффициент 2,63 с помощью блока 5. При этом идеальное дифференцирование реальными дифференцирующими звеньями с малыми постоянными времени, равным 0,001с.
Блоки 3, 4, 5 совместно с нелинейными функциональными элементами составляют УФКД упругих колебаний в переходных режимах. Это устройство, реализуемое на цифровом микроконтроллере, обеспечивает плавное изменение упругого момента от 0 до максимального значения в переходных режимах.
На рис. 4 показаны графики изменения сигналов скорости (Uз.с, Uс) и упругого момента Му при плавном изменении демпфирования (а) и при отсутствии демпфирования (б). В первом случае график действительной скорости практически совпадает с заданной при отсутствии колебаний упругого момента. Во втором случае наблюдаются существенные упругие колебания, причем наибольшая их амплитуда достигается после останова двигателя. Это свидетельствует о том, что после остановки двигателя ведомая масса упругой системы (как правило, это рабочий орган) будет совершать колебательные процессы. Поэтому, например, в шахтных клетевых подъемных установках используются специальные посадочные устройства, удерживающие массу в неподвижном состоянии.
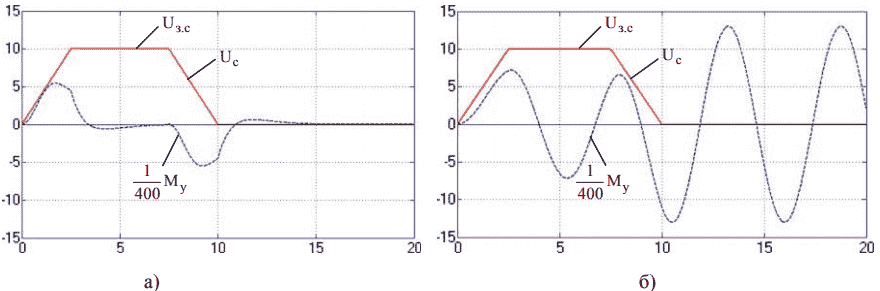
Рисунок 4 – Графики изменения сигналов скорости и упругого момента в переходных режимах:
а) при плавном изменении демпфирования; б) при отсутсвии демпфирования.
Одним из современных требований к электроприводам шахтных подъемных установок, лифтам высотных зданий является остановка концевого груза (клети или кабины) на заданном уровне без применения механического тормоза с последующим его наложением на неподвижную систему.
Для реализации таких режимов предлагаемый способ демпфирования упругих колебаний имеет особое значение. Подход к решению данной задачи основан на использовании функциональных законов управления. Управляющий сигнал является нелинейной функцией от входного воздействия при гибких обратных связях по упругому моменту, которыми являются скорости перемещения сосредоточенных масс.
Выводы
1. Для электромеханических систем, в которых рабочий орган соединен с электродвигателем с помощью упругого звена малой жесткости, важным является гашение упругих колебаний в переходных режимах (особенно в период замедления до полной остановки), используя систему управления.
2. Устранение колебательных процессов наиболее эффективно достигается на основе нелинейных законов управления по управляющему воздействию и реальной скорости механизма. Установлена возможность использования в качестве входного воздействия ошибки регулирования или непосредственно входного сигнала в период пуска и замедления.
3. Плавное демпфирование с использованием входного сигнала является универсальным способом и может распространяться на любые системы электропривода. Передача входного сигнала, эквивалентного желаемому коэффициенту демпфирования, может быть реализована с помощью микроконтроллера различными способами в зависимости от типа привода
Литература
1. Чермалых В.М., Родькин Д.И., Каневский
В.В. Системы электропривода и автоматики рудничных стационарных машин и установок. – М.:
Недра, 1976. – 400 с.
2. Чермалых А.В., Данилин А.В., Майданский И.Я. Моделирование систем оптимального по
динамическим нагрузкам управления электроприводом // Електромеханічні і енергозберігаючі системи. – Кременчук, 2007. – С. 61-65.
3. Чермалых В.М., Алтухов Е.И., Данилин
А.В., Козаченко А.В. Моделирование сложных
электромеханических систем с переменной частотой упругих колебаний // Вісник КППУ. – Кременчук. 2008. – Вип. 3/2008 (50). - С. 168 – 171.
4. Хлыпало Е.И. Нелинейные системы автоматического регулирования. М.: Энергия, 1967. –
450 с.
5. Дьяконов В. Simulink 4. Специальный
справочник. – СПб.: Питер, 2002. – 528 с