МНЛЗс шагающими балками
Авторы:Ю.А. Шамрай, Е.В. Ошовская, В.А. Сидоров
Донецкий национальный технический университет
Представлена модель кинематических параметров холодильника МНЛЗ с шагающими балками. Представлены результаты расчета траектории движения, и ускорений элементов конструкции.
Заключительная стадия процесса производства непрерывно литой заготовки включает их охлаждение, которое выполняется на специальных машинах – холодильниках. Холодильник реализует постепенное перемещение и кантовку заготовок, в результате чего выполняется их охлаждение. В технологических линиях современных МНЛЗ преимущественно используются конструкции холодильников с шагающими балками, в приводе которых применяются гидравлические цилиндры.
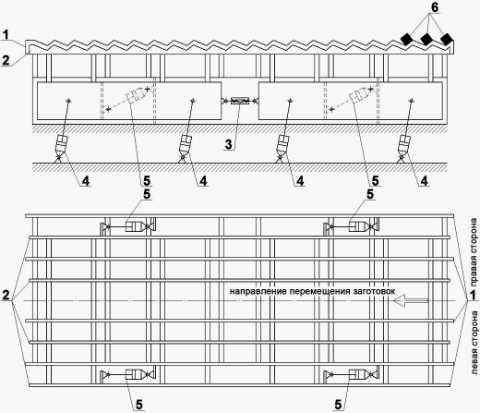
Типовая конструкция холодильника (рисунок 1) состоит из не-подвижных 1 и подвижных 2 балок, секции которых соединены фор-копфом 3; гидроцилиндров 4 вертикального перемещения и гидроцилиндров 5 горизонтального перемещения подвижных балок. Гидроцилиндры расположены симметрично относительно технологической линии МНЛЗ с левой и правой стороны холодильника.
Цикл движения холодильника включает подъем и перемещение подвижных балок вместе с заготовками (рабочий ход) и опускание и возврат подвижных балок в исходное положение (холостой ход). В исходном положении заготовка 6 находится на неподвижных балках 1. Далее подвижные балки 2 перемещаются вверх при помощи гидроцилиндров 4 и поднимают заготовки 6 выше уровня неподвижных балок 1. При помощи гидроцилиндров 5 выполняется горизонтальное перемещение подвижных балок 2 с заготовками 6. Затем гидроцилиндры 4 опускают подвижные балки 2, а гидроцилиндры 5 возвращают их в исходное положение для перемещения следующей заготовки.
Опыт эксплуатации холодильников данной конструкции пока-зал, что после 5 лет работы отмечается рост постепенных и внезапных отказов, как элементов гидропривода, так и опорных конструкций [1]. С целью изучения поведения конструкции при возникновении различных неисправностей гидропривода на первом этапе исследований авторами разработана математическая модель кинематических параметров холодильника МНЛЗ
, позволяющая воспроизводить движение его звеньев. В данной статье представлены основные зависимости, составляющие основу математической модели.
Рисунок 1. Схема холодильника МНЛЗ
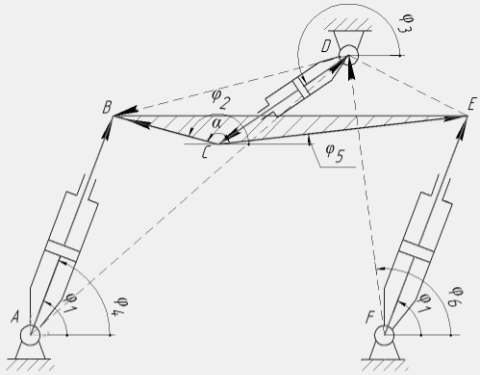
При разработке математической модели в конструкции холодильника была выделена структурная группа, представляющая собой рычажный механизм, расчетная схема которого приведена на рисунке 2. Звенья АВ и FE соответствуют гидроцилиндрам вертикального перемещения, а звено CD – гидроцилиндру горизонтального перемещения. Точки В, С и Е располагаются на подвижной балке и перемещаются плоскопараллельно. Длины звеньев СВ, СЕ и ВЕ постоянны. Четырехзвенник АВЕF образует паралелограмную систему. Положение каждого звена механизма в произвольный момент времени характеризуется углом φi. При подъеме и опускании подвижной балки звенья АВ и ЕF имеют переменную длину, которая зависит от хода гидроцилиндров, при этом звено CD имеет фиксированную длину и может поворачиваться вокруг точки D. При выдвижении и втягивании штока гидроцилиндра горизонтального перемещения изменяется длина звена CD, а звенья АВ и ЕF имеют постоянную длину и совершают качательное движение вокруг точек А и F соответственно. В исправном механизме lAB=lFЕ.
На основании графиков скорости Исходными данными математической модели выступают: 1) координаты точек А, F, D – (xA;yA), (xF;yF), (xD;yD); 2) координаты точек В, Е, C в начальном положении – (xВ0;yВ0), (xЕ0;yЕ0), (xC0;yC0); 3) начальные длины рычагов – lAВ0, lCD0, lFB0; 4) максимальный ход гидроцилиндра вертикального перемещения – sв.max; 5) максимальный ход гидроцилиндра горизонтального перемещения – sг.max; 6) график скорости штока гидроцилиндра вертикального перемещения как функция времени -Vв=f1(t); 7) график скорости штока гидроцилиндра горизонтального перемещения как функция времени -Vг=f3(t). Модель содержит следующие основные зависимости.
На основании исходных данных вычисляются геометрические параметры механизма, неизменные во время движения. А именно: – расстояния между шарнирами А, F, D, С, В, Е
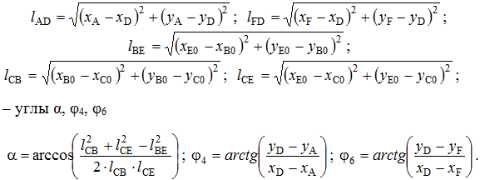
- углы α, φ4, φ6

Углы φ5 и φ2 определяются из системы уравнений, описываю-щих в виде функций положения два векторных контура ADCB и DCВ. Решение системы приводит к выражениям:

На основании графиков скорости Vв=f1(t) и Vг=f3(t) определяются зависимости хода штоков гидроцилиндров вертикального и горизонтального перемещения подвижных балок холодильника sв=f3(t) и sг=f4(t), а так же графики ускорений aв=f5(t) и aг=f6(t) Углы φ1 и φ3 вычисляются из системы уравнений, описывающих два векторных контура ADCB и FDCE, которая после преобразования сводится к уравнению четвертой степени вида

где A1, A2, …, A5 – коэффициенты, определяемые через неизменные геометрические параметры механизма и текущие длины звеньев lAВ, lCD, lFB, зависящие от хода штоков гидроцилиндров вертикального sв и горизонтального sг перемещения; z – переменная, z = cosφ1.
Действительный корень уравнения соответствует углу φ1, значение которого позволяет определить угол φ3, φ3 = f(φ1). Значения углов φ1 и φ3 однозначно определяют положение шарниров В, Е и С рычажного механизма:

Полученные параметры перемещения звеньев механизма далее используются для расчета их скоростей и ускорений в соответствии с методикой, приведенной в [2]. Представленные зависимости, составляющие математическую модель кинематических параметров холодильника с шагающими балками, были реализованы в виде программы в пакете MathCad. На рис. 3 показаны графики рассчитанных траекторий перемещения шарниров B и С, сравнение которых с траекториями, полученными графически при построении плана механизма в системе автоматизированного проектирования КОМПАС3D, подтвердило правильность выведенных зависимостей, погрешность составила менее 1%. Графики изменения кинематических параметров гидроцилиндров холодильника (звенья рычажного механизма АВ и DC) во времени для прямого и обратного хода показаны на рис.4.

Рисунок 3.Графики траекторий перемещения точек В и С (индекс: н – начальное; п – промежуточное; к – конечное положе-ние)



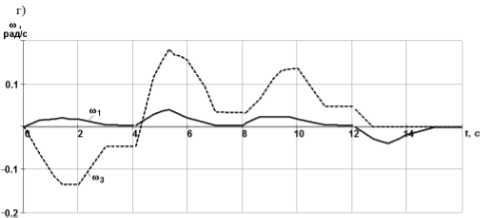

Рисунок 4. Графики изменения хода (б), линейного ускорения (в) штоков гидроцилиндров, угловой скорости (г) и углового ускорения (д) гидроцилиндров (звенья АВ и DC) во времени при заданных графиках скоростей (а) штоков
Выводы Таким образом, разработанная математическая модель кинемати-ческих параметров холодильника с шагающими балками и её программная реали-зация в пакете "MathCad" позволят изучить влияние неисправностей гидропривода (наличие утечек, несинхронность движения и др.) на силовое нагружение элемен-тов конструкции и разработать алгоритм диагностирования и мероприятия по повышению безотказности холодильника МНЛЗ.