Назад в библиотеку
УДК 004.3'12
СИСТЕМА СИГНАЛИЗАЦИИ АВТОМОБИЛЯ НА БАЗЕ
GSM/GPS/FPGA ТЕХНОЛОГИЙ
Грудинин А.А., Похомов А.А., Медведев К.В., Зинченко Е.Ю., Медгаус А.И.,
Зинченко Ю.Е.
Донецкий национальный технический университет
В настоящее время мы видим стремительный рост количества автомобилей на
дорогах. Развитые системы банковских услуг (кредиты, ссуды и т.п.) существенно
облегчили способы приобретения автомобилей. Но радужное настроение от купленного
автомобиля может измениться в связи с его кражей. Среди уличных преступлений в
последнее время лидируют кражи автомобилей. Они стали даже более популярными,
чем уличные грабежи. И тому есть простое объяснение: для большинства
злоумышленников кража машины наиболее легкий способ заработать.
В связи с такой ситуацией многие фирмы охранных средств вынуждены
разрабатывать все более сложные, тем самым и более дорогостоящие противоугонные
системы безопасности автомобиля. Но для конечного пользователя это не самый
лучший вариант.
Статистика автомобильных краж гласит, что взломщик тратит на кражу
автомобиля не более
15 минут. Можно легко представить квалификацию такого
человека. В связи с таким положением дел было предложено разработать систему
сигнализации, которая могла б указать месторасположение угнанного автомобиля, для
его дальнейшего поиска.
Разрабатываемая система является автономным модулем, который легко можно
спрятать, например, под капотом автомобиля или в любом другом «укромном» месте.
Единственным условием является наличие проводов питания. Основная идея
заключается в следующем: при определенном сигнале пользователя
(средствами
мобильной связи), активируется система определения локальных координат объекта,
соответственно определяются координаты и отправляются обратно пользователю. Для
реализации задуманного проекта используются различные цифровые компоненты,
согласованность их работы и является главной целью данной разработки. Система
безопасности состоит из следующих блоков:
GPS - модуль
GSM - модуль
FPGA - микроконтроллер
Блок преобразования напряжения
Структурная схема приведена на рис. 1. В качестве GPS - модуля используется
высокочастотный GPS - ресивер на базе современного чипсета SIRF Star III. Этот
чипсет применяется практически во всех современных GPS навигаторах.
Основные достоинства:
отличное качество приёма в условиях "городских каньонов" и леса;
Низкое энергопотребление (30 мА);
20 независимых каналов приема
Небольшие размеры (3 см х 3 см)
Несложный ASCII протокол обмена данными
18
GSM
GPS
модуль
Модуль
FPGA
микроконтроллер
Преобразователь
Автомобильная
напряжения
система
электропитания
Рисунок 1 - Структурная схема разрабатываемого устройства
Для синхронизации и обмена данными со спутниками системы глобального
позиционирования используется канал L1 работающий на частоте
1,575 MHz.
Используемая микросхема позволяет параллельно принимать информацию от
20
спутников одновременно.
Для определения месторасположения используется
американская система координат WGS-84. Для определения точного 2-D расположения
(широта и долгота) достаточно сигналов от 3 спутников, при наличии 4 спутника, есть
возможность определения еще и высоты относительно уровня моря (3-D формат).
Рисунок 1 - Принципиальная схема подключения GPS модуля к COM порту
Для подключения к FPGA микроконтроллеру используется COM порт. Передача
данных осуществляется по технологии RS232 SPI. Согласно RS232 высокий уровень
сигнала соответствует напряжению +3..+15, а нижний -3..-15 В. GPS модуль использует
пониженное питание
-
3.3 В., при этом передача данных осуществляется на
низковольтных уровнях - Low Voltage TTL. Уровни сигнала, которых не превышают
19
+-1,5 В. В связи с этим для согласованности можно использовать микросхему MAX232
или MAX3232, которые согласовывают уровни напряжения до
5В и
3.3В
соответственно. Для ситуации если пропадет основной источник питания, питание
автоматически переключается на питание от встроенного в модуль аккумулятора.
Принципиальная схема подключения GPS ресивера к COM порту микроконтроллера
приведена на рис.2.
GPS_RECEIVER
- GPS чипсет
(микросхема) обеспечивает работу со
спутниками, MAX3232 - микросхема согласования уровней сигналов, Battery
-
вспомогательный аккумулятор (опционально), VANT - сигнал управления внешней
энергозависимой антенной (опционально);
Для управления работой GPS модуля используется протокол NMEA - 0183.
NMEA - это формат передачи сообщений между корабельными приборами. Он
включает в себя систему сообщений для обмена информацией между навигационными
GPS приёмниками и потребителями навигационной информации. Все команды и
сообщения передаются в текстовом ASCII виде, относящиеся к GPS приёмникам
начинаются с $GP. В конце строки сообщения должны быть символы <CR> и <LF>. В
последнем поле сообщения может быть указана контрольная сумма текущего
сообщения, начинающаяся с разделителя *. Далее представлен пример команды для
определения месторасположения.
GLL - географическое положение — Широта/Долгота
1
2
3
4
5
6
7
$GPGLL,
1111.11,
a,
yyyyy.yy,
a,
hhmmss.ss,
A *hh
1. Географическая широта местоположения.
2. Север/Юг (N/S).
3. Географическая долгота местоположения.
4. Запад/Восток (E/W).
5. Гринвичское время на момент определения местоположения.
6. Статус A = данные верны
V = данные не верны
7. Контрольная сумма строки.
Пример сообщения
$GPGLL,5532.8492,N,03729.0987,E,004241.469,A*33
Другой основной составляющей системы является GSM модуль со встроенным
универсальным GSM модемом. GSM-модуль используется для передачи локальных
координат
(отправка SMS-сообщения) с удаленного объекта по средствам сотовых
сетей связи на телефон владельца объекта, его близких или службы охраны. В
предложенной системе в качестве GSM - модема используется мобильный телефон
фирмы Siemens. Это связанно с тем, что в телефонах данной фирмы доступ к модему
реализуется через COM порт, что существенно облегчает работу. Модем поддерживает
стандартный и расширенный наборы HAYES-команд.
Все команды и сообщения передаются в текстовом ASCII виде, относящиеся к
GSM приёмникам начинаются с AT префикса. После префикса AT (Attention Code)
может следовать одна или несколько команд. Эти команды пишутся на языке
промышленного стандарта и позволяют связаться с модемом. Модем всегда находится
либо в командном режиме, либо в режиме непосредственного управления (online-
режим). Как только включается модем, он переходит в командный режим работы.
20
Именно в этом режиме можно посылать управляющие АТ-команды. Ввод команд в
режиме непосредственной работы модема распознается как ввод данных.
Ниже представлены некоторые основные АТ-команды.
AT - Начало (префикс) командной строки.
Эти две буквы являются префиксом для остальных команд, и в тоже время
имеют самостоятельное значение. Это так называемая пустая команда. После
получения этой команды модем автоматически подстраивает скорость передачи и
формат знака к параметрам терминала.
ATD - Набор номера
Набираемые цифры: 0 1 2 3 4 5 6 7 8 9 # * A B C D
Разделители: ( ) <ПРОБЕЛ>
Модификаторы: T P W @ ! R S / ; ,
Эта команда начинает последовательность набора номера. Когда обнаружена
команда "D" (ATD), модем ждет 2 секунды и затем начинает набор номера. Модем
набирает 12 стандартных тоновых цифр. Эти цифры могут быть разделены символами-
разделителями, указанными выше. Модификаторы определяют способ, которым будет
осуществляться набор: Т - Тоновый набор (например: ATDT 0501265389).
Таким образом, GSM-модуль в данной системе имеет ряд преимуществ:
простота в управление
невысокая цена
компактность
Подключение GSM
- модуля осуществляется также через COM порт с
использованием микросхемы согласовывающей уровни сигналов.
Для синхронизации работы всех модулей, и программного управления
используется софтверный микроконтроллер MICROBLAZE. Микроконтроллер
реализован программно на базе FPGA. Фирма разработчик XILINK. Основные
характеристики и структурная схема приведены ниже.
Выбор именно софтверного микроконтроллера MICROBLAZE связан со
следующими преимуществами:
Оптимизированная структура микропроцессорного ядра, учитывающая
особенности ПЛИС, позволяющая минимизировать объем ресурсов кристалла,
требуемых для его реализации
Простота программирования
Наличие 2-х COM портов
Составная часть пакета Embedded Development Kit (EDK) - системы
разработки и отладки аппаратной части и программных средств встраиваемых
микропроцессорных
Возможность глубокой диагностики и настройки в связи с использованием
разработочной платы Xilinx Spartan-3E Starter Board
Полная совместимость компонентов ядра со средствами разработки проектов
и программирования ПЛИС ISE (Integrated Synthesis Environment) фирмы
Xilinx: Base ISE, Foundation ISE и Alliance ISE;
Простой аппаратный интерфейс
Возможность разработки микропроцессорных программ с применением
языков высокого уровня С/С++
Поддержка отладки
Основные элементы архитектуры микропроцессорного ядра MicroBlaze:
АЛУ;
21
блок регистров общего назначения;
регистр состояния (статуса);
программный счетчик (счетчик команд);
буфер команд (конвейерный регистр);
блок декодирования команд;
контроллер интерфейса шины команд;
контроллер интерфейса шины данных;
отладочная логика;
кэш-память команд;
кэш-память данных;
схема управления прерываниями.
Таблица 1 - Производительность и функциональные особенности MicroBlaze
Особенности
-MicroBlaze для Spartan-3
Процессор
32-разрядный RISC-процессор
Объем ОЗУ
8 Kb
Объем ПЗУ
8 Kb
Адресное пространство пользователя
64 Kb
Шина данных
32-разряда
Шина команд
32-разряда
АЛУ
32-разряда
Блок РОН
32х32-разряда
Система команд
106х32-разряда
Производительность
до 125 MIPS
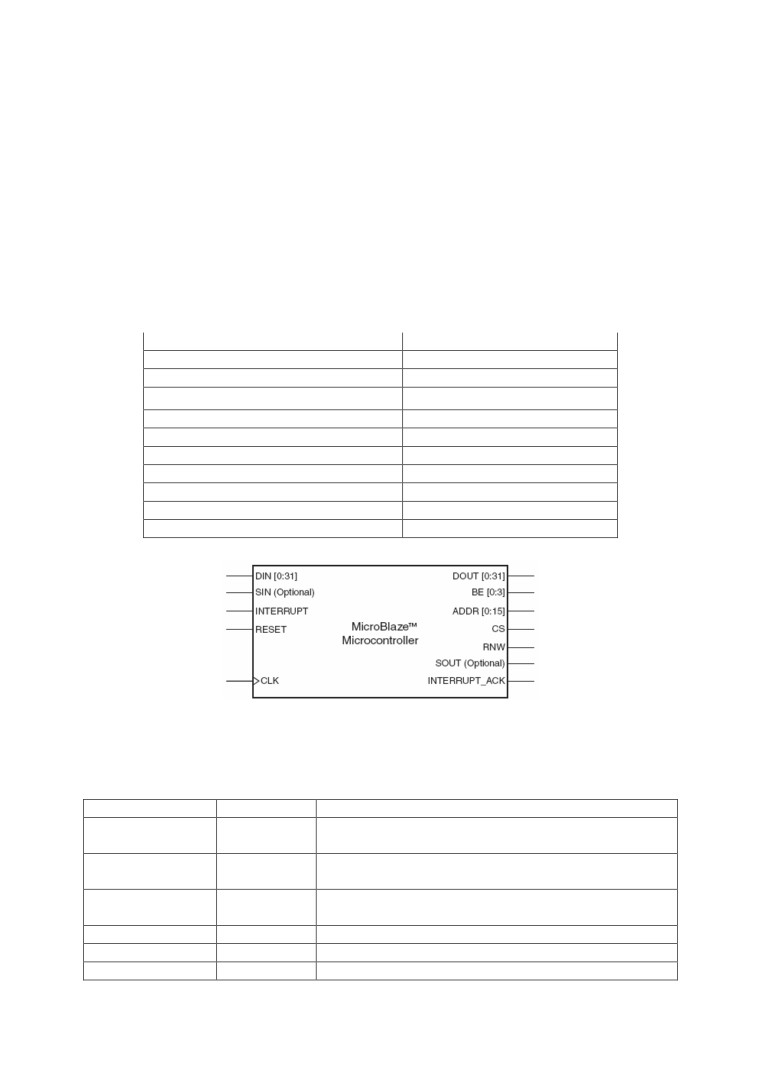
Рисунок - 3 Блок-схема софтверного микроконтроллера MICROBLAZE
Таблица 2 - Входные и выходные сигналы микроконтроллера MicroBlaze
Сигнал
Направление
Описание
Порт входных данных: исходных данных для
DIN [0:31]
Input
операций чтения
Последовательный ввод: UART входного сигнала
SIN
Input
(опционально)
Вход прерывания: генерирование прерывание
INTERRUPT
Input
микроконтроллера
RESET
Input
Вход сброса
CLK
Input
CLK-вход
DOUT [0:31]
Output
Порт выходных данных
22
Сигнал
Направление
Описание
BE [0:3]
Output
Byte Enables: показывает активные байты
ADDR [0:15]
Output
Адрес пользователя
Chip Select: активный высокий уровень для
CS
Output
операций чтения и записи
Read Not Write: активный высокий уровень для
RNW
Output
чтения и активный низкий уровень для записи
Последовательный порт: UART выходного сигнала
SOUT
Output
(опционально)
Подтверждение о прерывании: высокий уровень
NTERRUPT_ACK
Output
когда прерывание обслуживается
Литература
[1] Vincotech. A description of Vincotech`s GPS receivers a1084 v1.0. User`s
manual.
[2] NIMA. National Imagery and Mapping Agency. Technical report. Department of
Defense World Geodetic System 1984 (WGS-1984)
[3] Зотов В. Проектирование встраиваемых микропроцессорныхсистем на
основе ПЛИС фирмы Xilinx. М.: Горячая линия-Телеком. 2006.
[4] Зотов В. Система команд микропроцессорного ядра MicroBlaze
//
Компоненты и технологии. 2004. №№ 1-3.