Постановка проблемы. В технологических процессах часто встречается такой вид запаздывания, который называется транспортным. Такое запаздывание образуется, когда, например, вещество или энергия перемещаются с определенной скоростью из одной точки в другую без какого-либо изменения их свойств и характеристик [1]. Чистое запаздывание существенным образом влияет на протекание процесса в системе управления, так как может вызывать проблемы с обеспечением устойчивости, робастности и качества управления. Например, при резком нарушении уровня засыпи шихты на колошнике доменной печи, вызванное запаздыванием подачи материала, может произойти аварийная ситуация или же качество выплавки чугуна ухудшится [2]. С этой целью необходимо обеспечить компенсацию времени запаздывания для устранения выше названных проблем. В [3] авторами решена данная актуальная задача на основе предиктора Смита. Система с предиктором Смита обеспечивает высокую статическую и динамическую устойчивость и точность при изменении задания по уровню засыпи, а также нечувствительна к ступенчатому изменению погонной плотности шихты, подающейся на конвейерную ленту. Целью же данной публикации является исследование и анализ компенсации запаздывания на основе прогнозирующей модели с помощью MPC–регулятора (Model Predictive Control).
Методика решения. Одним из современных формализованных подходов к анализу и синтезу систем управления, базирующихся на математических методах оптимизации, является теория управления динамическими объектами с использованием прогнозирующих моделей [4]. Данный поход является улучшением классического управления с отрицательной обратной связью, в котором учитывается предсказание поведения объекта управления на различные типы входных воздействий. Регулятор полагается на эмпирическую модель процесса для того, чтобы предсказать дальнейшее его поведение, основываясь на предыдущих значениях переменных состояния. Кроме того, возможен учет транспортного запаздывания, учет изменений критериев качества в ходе процесса и отказов датчиков системы измерения.[5]
MPC Toolbox может обрабатывать модели, включающие в себя задержки во входных и выходных каналах [6]. Алгоритм MPC использует знания о динамических характеристиках технологического процесса. Все взаимодействия между переменными процесса рассчитываются на основе непрерывного решения в реальном масштабе времени. Основные элементы схемы управления динамическим объектом, в соответствии со стратегией MPC это: эквивалентная модель в пространстве состояний, учитывающая внутренние взаимосвязи между переменными состояния, на основе которой строится прогноз в пределах горизонта предсказания (оценка состояния, включая возмущение) в реальном масштабе времени; предсказание будущих состояний на основе модели; оптимизация в реальном масштабе времени будущей траектории движения системы с учетом действующих ограничений методом квадратичного программирования; выполнение первого шага управляющей последовательности [7].
При формировании эквивалентной модели объекта управления в пространстве состояний за основу была принята модель по каналу управления и возмущения, полученная в [3] и проверенная на условие управляемости и наблюдаемости. При формировании MPC-контроллера заданы основные его параметры: горизонт предсказания, интервал управления и горизонт управления. Горизонт предсказания – это временной интервал, на котором будут предсказываться выходные сигналы для их учета в управляющем сигнале. Он должен быть достаточно большим, чтобы учесть основную динамику модели. Интервал управления – это реалистичный шаг для вычисления управляющего сигнала (величина дискретизации шага MPC контроллера). Горизонт управления должен быть меньше или равным горизонту предсказания, для того чтобы также учесть основную динамику объекта. Он выбирается исходя из времени регулирования самой модели.
При выборе выше описанных параметров возникает проблема, связанная с попыткой контроллера противодействовать так называемому эффекту задержки
, вследствие чего на переходных характеристиках управляющего воздействия и уровня засыпи на колошнике наблюдались резкие скачки (рис.1).
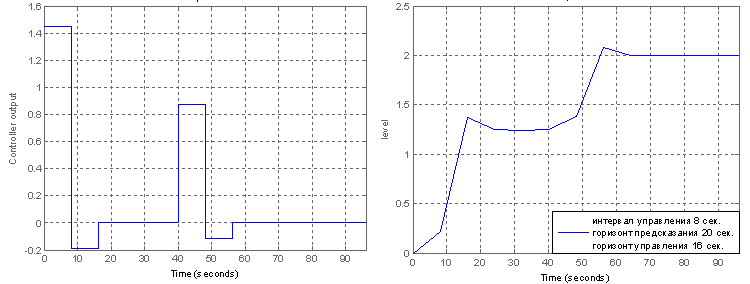
Рис. 1. Переходные характеристики выхода МPC-регулятора и уровня засыпи на колошнике без применения стратегии Blocking
Для устранения данной проблемы была выбрана стратегия Blocking, описанная в [8]. При исследовании влияния изменения интервала управления на переходной процесс темпа загрузки шихты в доменную печь, время запаздывания в системе составляет τ =5 с. Интервал управления τu был выбран равным 3, 5, 10 секундам соответственно, а горизонт предсказания tпр=20 с, исходя из того, что время переходного процесса темпа загрузки с ПД-регулятором составляет 16 секунд [3]. Получены следующие переходные процессы выхода регулятора и уровня засыпи на колошнике (рис.2).
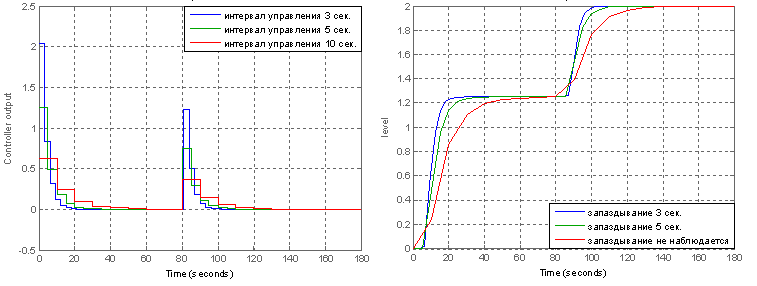
Рис. 2. Переходные характеристики выхода МPC-регулятора и уровня засыпи на колошнике с применения стратегии Blocking
Анализируя переходные характеристики (рис. 2), можно сделать выводы:
- при τu=3 с, τ=3 с, время переходного процесса 26 с, перерегулирования не наблюдается, изменение уставки уровня с 1,25 до 2 метров на 80 секунде система отрабатывает за 23 секунды;
- при τu=3, τ=5 с, время переходного процесса 46 секунд, перерегулирования также не наблюдается, изменение уставки уровня с 1,25 до 2 метров на 80 секунде система отрабатывает за 30 секунд;
- при τu=10 с запаздывание не наблюдается, время переходного процесса 55 секунд, перерегулирования не наблюдается, изменение уставки с 1,25 до 2 метров на 80 секунде система отрабатывает за 50 секунд.