Рисунок 1 – Технологическая схема шахтной гидротранспортной установки
УДК 622.648.2-52
Источник: Автоматизация технологических объектов и процессов. Поиск молодых. Сборник научных работ ХV научно-технической конференции аспирантов и студентов в г. Донецке 25-26 мая 2016 г. - Донецк, ДонНТУ, 2016. – 341 с.
Ермолинский А.А., магистрант, Оголобченко А.С., доц., к.т.н.
(ГОУ ВПО «Донецкий национальный технический университет», г. Донецк, ДНР)
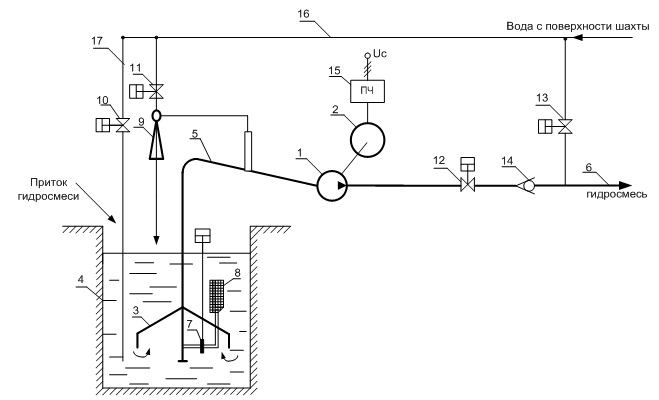
Шахтная гидротранспортная установка предназначена для напорного трубопроводного транспорта гидросмеси по горизонтальным горным выработкам шахты с гидравлическим способом добычи угля. Гидротранспортная установка представляет собой узел сосредоточения гидросмеси (пульпосборника) с нагнетателем (например, углесосный агрегат). Гидросмесь в пульпосборник поступает от забоя по безнапорному каналу и изменяется по величине в зависимости от режима работы забоя. Как правило, ёмкость пульпосборника недостаточная для компенсации возможных колебаний притока гидросмеси. На рисунке 1 приведена технологическая схема шахтной гидротранспортной установки.
Рисунок 1 – Технологическая схема шахтной гидротранспортной установки
На рисунке 1 обозначено: 1 – углесос; 2 – приводной электродвигатель; 3 – всасывающее устройство; 4 – зумпф; 5 – всасывающий трубопровод; 6 – напорный трубопровод (пульповод); 7 –шибер регулировочный; 8 – трубопровод подпитки; 9 – гидроэлеватор; 10 – задвижка на разбутовочном трубопроводе; 11 – задвижка на трубопроводе заливки углесоса; 12 – задвижка на пульповоде; 13 –задвижка на трубопроводе для промывки водой пульповода ; 14 – обратный клапан; 15 – частотный преобразователь; 16 - трубопровод воды с поверхности шахты;17 - трубопровод разбутовочной воды;
Для гидротранспортной установки локальный критерий управления Ф1 (Тэ) может быть представлен как [1]:
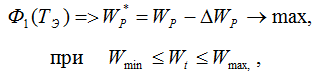
где: Wt - текущий объем пульпосборника, заполненного гидросмесью; Wmin , Wmax -соответственно верхнее и нижнее значение емкости пульпосборника; Wp – регулирующая емкость пульпосборника; W*p - объем эффективно используемой части регулирующей емкости Wp, характеризующий амплитуду колебаний уровня гидросмеси в пульпосборнике, м3; dWp - объем неэффективно используемой части регулирующей емкости Wp, который обусловлен максимальной величиной абсолютной погрешности принятого способа управления гидротранспортной установкой, м3; Тэ - период определения эффективности;
Для автоматического управления шахтной гидротранспортной установкой в настоящее время известна аппаратура типа АУУ[1]. Однако аппаратура имеет ряд недостатков, так алгоритмом управления не предусмотрено достижение указанной цели управления (1), аппаратура выполнена на "устаревшей" элементной базе и не соответствует современным требованиям к системам управления. Нами предлагается компьютеризированная система автоматического управления гидротранспортной установкой (система САУГ), структурная схема которой приведена на рисунке 2.
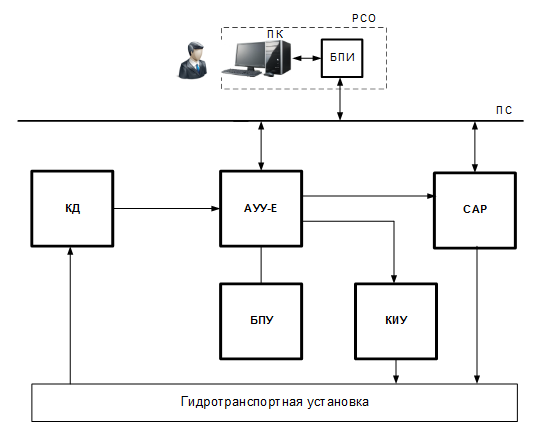
Рисунок 2 – Структурная схема компьютеризированной системы автоматического управления гидротранспортной установки
Система управления САУГ двухуровневая. На верхнем уровне управления расположена рабочая станция оператора гидротранспортного комплекса (РСО), которая представляет собой промышленный компьютер ПК с блоком преобразования БПИ интерфейса RS485 в интерфейс RS232. Комплекс устройств станции РСО с использованием SCADA-системы, например MasterSCADA v3.6, выполняет следующие функции:
На нижнем уровне управления находятся: комплекс датчиков КД; комплекс исполнительных устройств КИУ; устройство управления углесосным агрегатом типа АУУ-Е; блок питания БПУ - внешний источник искробезопасного постоянного напряжения; система автоматического регулирования подачи углесоса (система САР).
Физическую и логическую связь между промышленными контроллерами и станцией РСО в единую систему автоматического управления обеспечивает промышленная сеть, например, Profibus [2].
Комплекс датчиков КД включает в себя следующие датчики:
Комплекс исполнительных устройств КИУ состоит из электрогидравлических задвижек и регулировочного шибера всасывающего устройства углесоса. Система автоматического регулирования подачи углесоса САР представляет собой систему регулирования частоты вращения асинхронного электродвигателя углесоса с целью изменения подачи гидротранспортной установки. Необходимость регулирования обусловлена поддержанием работы гидротранспортной установки при ограниченной емкости зумпфа пульпосборника и неравномерном притоке гидросмеси от забоев. Как известно, способы автоматического регулирования подачи гидротранспортных установок по технической сущности делятся на две группы [1]: регулирование без предварительного перевода углесоса на воду и регулирование с предварительным таким переводом. Рекомендуется применение второго способа регулирования. Этот способ основан на использовании специального всасывающего устройства УВ-5, с помощью которого возможно перевести работу углесоса с гидросмеси на воду без остановки углесоса. Суть способа регулирования заключается в предварительном переводе углесоса на воду, полной промывке транспортного трубопровода на максимальной подаче углесоса за счет воды, содержащейся в пульпосборнике, с последующим снижением подачи углесоса до максимально возможного значения («зарегулированный» режим). Время работы гидротранспортной установки на пониженной подаче зависит от величины производительности забоев, запаса емкости пульпосборника и от величины минимальной подачи углесоса в «зарегулированном» режиме. По истечении времени работы гидротранспортной установки в «зарегулированном» режиме, система САР переводит работу углесосного агрегата на номинальный режим работы, а всасывающим устройством на работу по гидросмеси («разрегулированный» режим работы).
Один из вариантов структурной схемы системы автоматического регулирования подачи углесоса САР приведенный на рисунке 3. На рисунке 3 обозначено: W1 (р) и W2 (р) - передаточные функции соответственно регулятора внутреннего и внешнего контура; WПЧ (р) - передаточная функция преобразователя частоты; WЕ (р) и WМ (р) - передаточные функции в соответствии с электромагнитной и механической составляющими двигателя; WТВ (р) - передаточная функция пульповода.

Рисунок 3 – Структурная схема системы САР подачи углесоса
В результате моделирования на ЭВМ, с использованием пакета MatLab, получены графики переходных процессов для различных типов регуляторов и показано, что наиболее приемлемые показатели качества имеет система САР с ПИД-регулятором, настроенным на модульный оптимум.
Устройство управления углесосным агрегатом типа АУУ-Е выполняет следующие функции:
Структурная схема устройства управления углесосным агрегатом типа АУУ-Е приведена на рисунке 4. В состав устройства входят следующие блоки: БЗС - блок согласования и защиты, БМК - блок микроконтроллера, ИМ - интерфейсный модуль, БВК - блок вывода команд управления, БП - блок памяти, ПУИ - пульт управления и индикации оператора гидротранспортной установки; БПУ – блок питания устройства управления Блок БЗС предназначен для согласования входных сигналов от датчиков с параметрами микроконтроллера и защиты микроконтроллера при возможных повреждениях линий связи. Блок микроконтроллера БМК представляет из себя микроконтроллер, основной функцией которого является обработка входных сигналов и формирование управляющих команд. Интерфейсный модуль ИМ предназначен для обеспечения передачи данных между устройствами системы управления с использованием интерфейса RS-485. Блок БВК предназначен для согласования выходных сигналов от микроконтроллера с параметрами исполнительных устройств.
Пульт ПУИ предназначен для:
Блок памяти БП предназначен для накопления данных при управлении углесосным агрегатом.
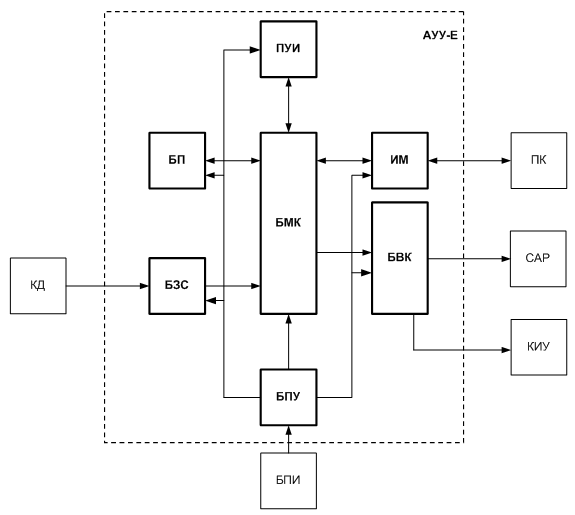
Рисунок 4 – Структурная схема устройства управления углесосным агрегатом типа АУУ-Е
Нами разработана принципиальная электрическая схема устройства на базе микроконтроллеров ATmega 64 и ATmega 16. Проведен анализ и выбор существующих технических средств автоматизации для предложенной структуры компьютеризированной системы автоматического управления гидротранспортной установкой.