
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Огляд досліджень та розробок
- 3. Зліт БПЛА
- 4. Посадка БПЛА
- 5. Повернення БПЛА
- Висновки
- Перелік посилань
Вступ
Авіаційні безпілотні комплекси в даний час набули великого поширення. Безпілотні літальні апарати допомогають вирішити цілий спектр наукових і прикладних задач, пов'язаних з геологією, екологією, метеорологією, зоологією, сільським господарством, з вивченням клімату, пошуком корисних копалин і т.д. Вони можуть стежити за міграцією птахів, ссавців, косяків риби, зміною метеоумов і льодовій обстановки на річках, за рухом суден, переміщенням транспорту і людей, вести аеро, фото і кінозйомки, радіолокаційну і радіаційну розвідку. [10]
1. Актуальність теми
Безпілотні літальні апарати набирають все більшої популярності і застосовуються в самих різних сферах діяльності, в різних кліматичних умовах, і вирішують найрізноманітніші завдання. Для початку, необхідно БПЛА запустити, потім його успішно повернути, і посадити (розглядаються БПЛА літакового типу). Способи зльоту і посадки безпілотників відомі. Також відомі їхні переваги і недоліки. Поки не створено ідеальної системи, актуальність даної теми буде мати вагу.
2. Огляд досліджень та розробок
На даний момент, у відкритому доступі існує безліч літератури і статей присвячених бепилотным літальним апаратам. Однак, не у всіх міститься інформація про зльот та посадку БПЛА. В процесі написання магістерської дисертації, мною були знайдені і вивчені такі роботи:
У книзі [1] розглянуті моделі, що описують різні види старту, зльоту і посадки БПЛА при відсутності та наявності вітрових збурень, представлених довільним вектором швидкості вітру. При опису процесів старту, зльоту і посадки БЛА поряд з оригінальними математичними моделями використовуються моделі їх руху. Безліч статей присвячених зльоту і посадці безпілотника посилаються на цю книгу.
У статті [2], на базі функціонального аналізу існуючих конструкцій пускових пристроїв безпілотних літальних апаратів з напрямними обґрунтовано необхідність розробки пускового пристрою раціональної конструкції з використанням гумового амортизатора. Наведено алгоритм розрахунку методом чисельного інтегрування складових процесу розгону літального апарату пусковим пристроєм пропонованої конструкції. Описано пристрій і робота конструктивних елементів двухшнуровой гумової катапульти, а також вимоги до літального апарату, що пред'являються конструкцією катапульти. На основі виконаних розрахунків і пробних пусків надані рекомендації щодо застосування пускових пристроїв подібної конструкції.
Також існує деяка кількість статей в інтернет, присвячених темі зльоту і посадки БПЛА.
3. Зліт БПЛА
На даний момент, застосовують такі способи зльоту БПЛА:
- запуск з рук;
- запуск з катапульти;
- запуск із злітної смуги.
Зі злітної смуги злітають в основному безпілотники які важать сотні кілограмів або тонн, до того ж необхідно наявність злітної смуги. Для зльоту малорозмірних безпілотних літальних апаратів широко використовуються пускові пристрої типу катапульти, що дозволяють забезпечити швидкий і ефективний зліт зазначених літальних апаратів з силовою установкою порівняно невеликої потужності.
Зліт з катапульти - це найпопулярніша система запуску БПЛА. Т. я. робота БПЛА відбувається в основному в необладнаних місцях злітно-посадковою смугою. Запуск моделі планера БПЛА здійснюється з допомогою катапульт різних систем і методів отримання пускової енергії. Вибір типу катапульти залежить від маси планера БПЛА, вимог до злітного майданчику і часу підготовки до зльоту, а також обмеження силового впливу на планер що запускається.
Катапульти бувають:
- пневматичні;
- гумові.
Для здійснення пуску моделей планерів БПЛА вагою від 15 до 50 кілограм зазвичай використовують пневматичні, або механічні катапульти. Пневматична катапульта володіє відносно невеликими габаритними розмірами і вагою. Так само плюсом є зручність експлуатації в зимові періоди часу. Механічні катапульти можуть використовувати енергію падаючого вантажу, лебідковий привід або інші пристрої. Пневматичні катапульти розганяють БПЛА з допомогою стисненного повітря. Плюсом є зручність експлуатації в зимові періоди часу. [3]
Найпоширенішими у класі моделей планерів БПЛА є еластичні системи катапультування. В основі принципу їхньої роботи полягає сила, отримана в результаті амортизації гумового шнура. Конструкція катапульти виконується модульною, що дозволяє зменшити габаритні розміри в транспортувальному стані та забезпечити швидку збірку на місці проведення запуску. Основні пропоновані до них вимоги: надійність, яка полягає в працездатності механізму в різних кліматичних умовах, виключення пошкодження дорогого літального апарату, надійності запуску; ергономічність, пов'язана з мінімізацією масогабаритних характеристик, простотою використання, мінімальним часом розгортання і згортання; високі експлуатаційні якості, які полягають в довговічності, ремонтопридатності, придатності до утилізації.
Рисунок 1 – Двушнурова гумова катапульта для запуска в полiт безпілотного літального апарату[2] (анимацiя: 5 кадрiв, 6 циклiв повторення, 51 кiлобайт)
Відомі способи зльоту малорозмірних безпілотних літальних апаратів з катапульти, обладнаної візком, переміщуваного розгінним пристроєм по напрямних, в цілому можуть бути охарактеризовані наступним чином. Перед запуском з допомогою стикувального пристрою літальний апарат приєднують до візка, розташованої на катапульті в стартовому положенні, а після її розгону будь-яким методом до необхідної швидкості літальний апарат від'єднують від візка, а візок зупиняють.
Запуск моделі планера БПЛА з допомогою фізичної сили людини, без спеціалізованих пристосувань здійснюється при масі моделі менш 5кг Основний плюс видно з назви, але в теж час основний мінус полягає в безпеці, на старті БПЛА включає повну потужність двигуна і його можна неутримати.
4.Посадка БПЛА
Посадка на парашут/подушку безпеки
Очевидний плюс парашута - це досить м'яка посадка, з умовою м'якою підстилаючої поверхні. Але тут же відразу виходить і мінус, по-перше, додаткова вага, по-друге, при спрацьовуванні парашута, БПЛА зупиняється і його політ залежить тільки від вітру. Якщо парашут розкривається на висоті 100 метрів, при швидкості вітру 14м/с, то апарат може унести на кілометр від передбачуваної точки посадки. Цей факт обмежує використання БПЛА з парашутною системою на деяких об'єктах. Якщо парашут після посадки не відстрілюється, він може надутися і потягти літак по землі, що може призвести до поломок. Великі безпілотні апарати (більше 15кг), мають подушку порятунку, яка пом'якшує удар при посадці, це дозволяє зробити парашутну посадку більш швидкою, не боячись за літак.
Посадка на корпус
Можлива тільки при малій вазі апарату і необхідної жорсткості. Такі системи добре експлуатуються на сильно вітряних об'єктах. При підльоті до точки посадки апарат включає реверс двигуна і сідає на корпус прямо в призначену точку, не залежно від швидкості вітру.
Спосіб посадки на аэрофінішер.(для великих апаратів).[7]
Спосіб полягає в тому, що на посадковому режимі траєкторію польоту літака формують так, щоб зачеплення за приймальний ділянку троса відбувалося при прольоті або після прольоту над цією ділянкою, після чого вимикають повітряний рушій і як можна інтенсивніше гальмують літак до заданої швидкості, при цьому регулюючи випуск приймального троса. При цьому для заданого діапазону швидкостей заходу на посадку в допустимих умовах експлуатації конкретного типу літака характеристики системи, захоплюючою трос, визначені так, щоб ширина заметаємої гнучким повідцем смуги захоплення була не менше точності управління по висоті траєкторією польоту цього типу літака. Після зачеплення за приймальний трос першого каскаду аэрофінішера проводиться інтенсивне поглинання кінетичної енергії літака за допомогою дії зосередженої сили на основний несучий елемент його конструктивно-силової схеми. Далі на другому каскаді аэрофинишера, зв'язаному з першим, гальмування безпілотника до повної зупинки здійснюється за рахунок розподіленого силового впливу на його поверхню демпфуючих елементів цього каскаду. Технічний результат спрямований на підвищення ефективності експлуатаційних властивостей безпілотного літального апарату.
Спосіб посадки на уловлюючу сiть [5]
У способі виконують посадку БЛА в уловлюючу сiть, причому формують кругову зону заходження на посадку, для чого в заданій точці посадки встановлюють ненаправлене джерело радіовипромінювання, а на борту БЛА встановлюють радиопеленгатор, виконують автономне введення БЛА в зону заходження на посадку, використовуючи штатне бортове навігаційне обладнання, виробляють прийом сигналів ненаправленного джерела радіовипромінювання і виконують його кутовий супровід в горизонтальній і вертикальній площинах бортовим радіопеленгатором, за даними якого з допомогою бортової системи управління формують команди самонаведення БЛА на джерело радіовипромінювання в горизонтальній площині. Одночасно виконують самонаведення БЛА на джерело радіовипромінювання в горизонтальній площині і політ БЛА на заданій висоті, по досягненні заданого кута візування джерела радіовипромінювання у вертикальній площині переводять БЛА в пікірування, за даними бортового радиопеленгатора з допомогою бортової системи управління формують команди самонаведення БЛА на джерело радіовипромінювання у вертикальній площині, виконують самонаведення БЛА на джерело радіовипромінювання у вертикальній і горизонтальній площинах до потрапляння в уловлюючу сiть, встановлену горизонтально над джерелом радіовипромінювання.
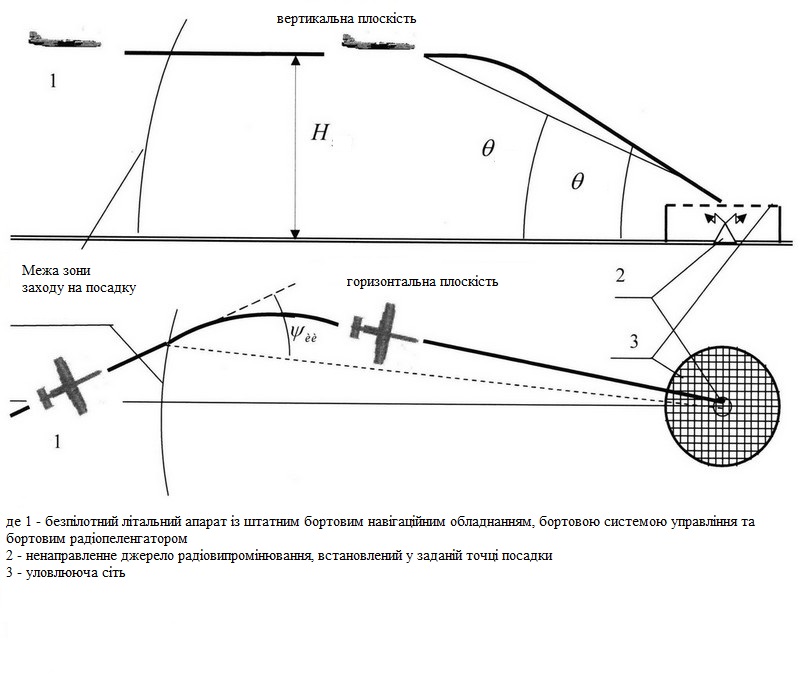
Рисунок 2 – Способ посадки на улавливающую сеть
5. Повернення БПЛА
Повернення безпілотного літального апарата здійснюється за допомогою польотного контролера.[9] А саме функція - Auto Return To Launch Mode (RTL) (автоматичне повернення на базу) - використовуючи установки фэйлсейва при втраті сигналу. При цьому літак буде автоматично повернуто на базу. По досягненні вихідної точки система ініціює автоматичний політ по колу над цим місцем.
Висновки
Все йде до того, що за безпілотної авіацією майбутнє, завдяки застосуванню в різних сферах. Це дозволяє економити безліч ресурсів. Не будуть стояти на місці у своєму розвитку і різні допоміжні системи, такі як системи зльоту і посадки, наприклад. До тих пір, поки не буде створено ідеальний засіб, що виключає всі недоліки існуючих.
На даний момент проводиться моделювання систем злету в програмному продукті Comsol.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: травень 2018 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список источников
- Моисеев В.С. Прикладная теория управления беспилотными летательными аппаратами: монография./ В.С. Моисеев – Казань: ГБУ «Республиканский центр мониторинга качества образования» (Серия «Современная прикладная математика и информатика»), 2013 – 768 с.
- И.В. Калужинов Двухшнуровая резиновая катапульта для запуска в полет беспилотного летательного аппарата / И.В. Калужников, В.А. Яценко - Открытые информационные и компьютерные интегрированные технологии. Сборник научных трудов: Национальный аэрокосмический университет им. Н.Е. Жуковского "Харьковский авиационный институт" № 51, 2011, с.75-82
- Аленченков Г.С. Стартовые устройства беспилотных летательных аппаратов, применяемых для мониторинга объектов сельского хозяйства – [Электронный ресурс]. Режим доступа: Botaniks.ru
- Российские и зарубежные беспилотники (БПЛА). – [Электронный ресурс]. Режим доступа: MILITARYARMS.RU
- Способ точной посадки беспилотного летательного аппарата. – [Электронный ресурс]. Режим доступа: findpatent.ru
- Выбор технических характеристик беспилотных летательных систем для решения задач картографирования. - [Электронный ресурс]. Режим доступа: http://wiki.gis-lab.info
- Cпособ посадки беспилотного самолета на аэрофинишер. – [Электронный ресурс]. Режим доступа: findpatent.ru
- Принципы выбора беспилотника под Ваши задачи. – [Электронный ресурс]. Режим доступа: съемкасвоздуха.рф
- RTL Mode (Return To Launch). – [Электронный ресурс]. Режим доступа: ardupilot.org
- Беспилотные самолеты. – [Электронный ресурс]. Режим доступа: transpobrand.ru