
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Аналіз водовідливу як об'єкта автоматизації
- 3.1 Технологічні групи управління
- 3.2 Технологічний процес відкачування води
- 4. Вибір базової апаратури автоматизації технологічного процесу водовідливу
- 4.1 Модернізація апаратури автоматизації
- Висновки
- Перелік посилань
Вступ
Останнім часом у вугільній промисловості спостерігається прагнення до освоєння більш глибоких горизонтів, яке дає поштовх до створення нових і вдосконалення вже наявних машин і механізмів для видобутку, транспортування корисних копалин, а так само водовідливу і вентиляції.
Шахтний водовідлив є одним з найважливіших технологічних процесів в шахті, від безперебійної роботи якого залежить безпека роботи в умовах шахти. Також, водовідливні установки є великими енергоспоживачами.
До шахтним насосних агрегатів і насамперед працючих в умовах відпрацювання родовищ, небезпечних по газу і пилу, пред'являються підвищені вимоги щодо безпечної експлуатації та захисту навколишнього середовища. Ці вимоги враховуються в конструкціях сучасних нових і модернізованих насосів [1].
1. Актуальність теми
Експлуатація стаціонарних шахтних водовідливних установок включає: управління электронасосными агрегатами – пуск і зупинку в залежності від прийнятої організації роботи та контроль за основними параметрами, що визначають режим роботи (тиск в патрубках, подачу насоса, напругу і силу струму, що живлять електродвигун, температуру підшипників, витрату води через розвантажувальний пристрій), технічне обслуговування, перевірку і забезпечення нормального стану вузлів, засувок, зворотних клапанів, пускової і контролюючої апаратури, організації та проведенні поточних профілактичних ремонтів та встановлення строку направлення насосів на заводи для проведення капітального ремонту.
Таке явище, як кавітація, негативно впливає на насоси і процес водовідливу в цілому. Тому боротьба з нею є важливим аспектом у процесі експлуатації водовідливних установок.
2. Мета і задачі дослідження та заплановані результати
Метою дослідження і розробки є підвищення ефективності в роботі шахтної головної водовідливної установки шляхом застосування системи автоматизації, яка здійснює контроль і управління роботою водовідливної установки.
Вимоги до системи автоматизації головної водовідливної установки:
- заливання водою насоса і всмоктуючого трубопроводу, і автоматичний пуск насосного агрегату в залежності від рівня води у водозбірнику;
- автоматичний останов насосного агрегату в залежності від рівня води у водозбірнику;
- автоматичне включення додаткового насоса при досягненні аварійного рівня води або виходу з ладу робочого насоса;
- автоматичне суміщення технологічних перерв в роботі водовідливу з встановленими періодами максимуму електричного навантаження в енергосистемі;
- контроль замулення попереднього відстійника і автоматичну чистку його гідроелеваторною установкою;
- автоматичний контроль за величиною активної потужності, яку споживає приводний електродвигун насоса;
- автоматичний контроль за величиною коефіцієнта корисної дії водовідливної установки;
- автоматичний контроль процесу заливки і подачі насоса;
- автоматичний контроль температури підшипникових вузлів насосів;
- можливість передачі інформації і сигналізації диспетчеру шахти про стан та режим роботи насосного агрегату та рівня води у водозбірнику водовідливної станції.
Виконання системою автоматизації наведених вимог дозволить прогнозувати аварійні ситуації і, як наслідок, вчасно усувати аварії, шляхом відключення насосного агрегату та проведення відповідних ремонтних робіт. Так як роботи по запобіганню аварійних ситуацій завжди менш трудомісткі, ніж роботи по ліквідації їх наслідків, впровадження системи автоматизації дозволить заощадити частину коштів на заробітну плату та запасних матеріалах.
3. Аналіз водовідливу як об'єкта автоматизації
Основними функціями системи управління є запуск, зупинка і автоматичне регулювання електронасосних агрегатів в залежності від рівня води у водозбірнику, які визначають ефективність відкачування води з шахти.
Заданий верхній рівень є імпульсом для підготовки і запуску агрегату в роботу, нижній – для зупинки.
При роботі на приплив раціональний рівень води у водозбірнику підтримується незмінним автоматичним регулюванням подачі насоса, рівним приливу.
3.1 Технологічні групи управління
Можна виокремити дві групи технологічних схем: перша – проточну частину основного насоса перед пуском необхідно заповнити рідиною, друга – проточна частина основного насоса завжди заповнена рідиною.
Згідно технологічної групи визначається порядок запуску агрегату: у першій групі перед вмиканням електродвигуна основного насоса необхідно з допомогою допоміжних засобів заповнити водою його проточну частину і тільки після закінчення заливки включити електродвигун; у другій групі при подачі сигналу про запуск агрегату відразу слід включити електродвигун основного насоса. Таким чином, у другій групі технологічних схем спрощене автоматичне управління електронасосним агрегатом.
Найбільш поширеною є схема, при якій насосна установка 5 (рис. 1, а) перебуває в камері, розташованій вище рівня води у водозбірнику. Вертикальне відстань від осі насоса до нижнього рівня рідини повинна бути не більше допустимої геометричної висоти всмоктування. Визначається вона сумою висот центру насоса над грунтом камери hn, різницею відміток грунту камери і нижнього рівня води hг.к.
Всмоктуючий трубопровід 6, обладнаний зворотним (прийомних) клапаном і гратами. Клапан 8 перешкоджає витіканню води з проточної частини основного насоса при заливці, а решітки охороняють від надходження в трубопровід твердих частинок крупністю більшою 0,3 – 0,5 ширини вихідної щілини робочого колеса.
На нагнітальному трубопроводі обладнуються клапан і зворотний клапан 2. Призначення зворотного клапана – зберігати воду в нагнітальному трубопроводі при простої насосів, не допускати зворотного руху води при зупинці насосів і захищати насос від гідравлічного удару при позаплановому зупинку. Засувка, зазвичай керована з електро – або гідравлічним приводом, служить для зміни режимів роботи агрегату.
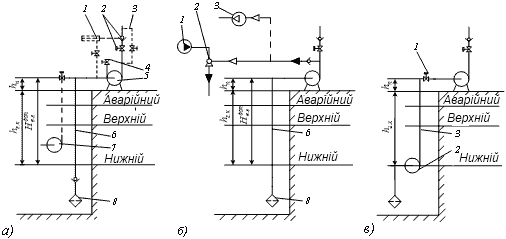
Рисунок 1 – Технологічні схеми при розташуванні насосів вище рівня води у водозбірнику
У неробочий період вода через наявні нещільності в підводящому вузлі протікає і перед пуском проточна частина основного насоса виявляється незаповненої.
Проточна частина насоса і підводящого трубопроводу заповнюється двома принципово різними способами: подачею води в насос і в підводящий трубопровід з видаленням з них повітря; створенням вакууму в системі, при цьому заповнення водою здійснюється під дією атмосферного тиску (рис. 1, б).
При першому способі заповнення водою проточної частини основного насоса перед його запуском здійснюється за однією з трьох схем: занурювальним електронасосом 7 (див. рис. 1, а), що подає воду в проточну частину основного насоса; водою з нагнітального ставу через пропускний пристрій 3 в обхід зворотного клапана і засувки 2; водою з постійно заповненого резервуара 1.
Процесом заливки керують з допомогою запірних пристроїв, що перебувають на трубопроводі. Він може здійснюватися автоматично, дистанційно або вручну.
У цій системі обов'язково наявність на всмоктую чому трубопроводі зворотного клапана 8.
Повітря в процесі заливки видаляється через випускний пристрій 4 (кран, зворотний клапан, вантуз).
Порядок запуску наступний: при отриманні імпульсу від датчика верхнього рівня (автоматично чи вручну включається один з пристроїв 1, 3 або 7 і насос заповнюється водою. Коли заливка закінчується, що визначається з допомогою реле тиску або з часу, включається електродвигун основного насоса і відкривається засувка на нагнітання.
Переваги першого способу: зручність, простота технічного обслуговування, проведення поточних та профілактичних ремонтів, монтажу та демонтажу обладнання з застосуванням механізації.
Недоліки: реальна ймовірність виникнення кавітації внаслідок значної геометричної висоти всмоктування, збільшення опору на вході (клапан, сітка) при забрудненні можливе сітки; зниження надійності заливки і невизначеність часу заповнення через можливість збільшення витоків через зворотний клапан 8 при заклинюванні або забруднення; ускладнення організації запуску основного насоса необхідністю заливки перед пуском шляхом включення допоміжних засобів.
Другий спосіб заливки здійснюється створенням вакууму в проточній частині основного насоса і підвідному трубопроводі. Вакуум створюється струменевим вакуум-насосом 2 (рис. 1, б) водокольцевым – 3. Максимальний вакуум відповідає допустимій вакуумметричній висоті всмоктування. У цій системі немає потреби в зворотному (приймальному) клапані та пристрої для випуску повітря.
Переваги другого способу такі ж, як і першого, але ще і підвищується надійність заливки і знижується ймовірність виникнення кавітації із–за відсутності на трубопроводі зворотного підвідного клапана, і надходження в насос повітря в період нормальної роботи через пристрій 4 (рис. 1, а).
Недоліки: значна відстань від рівня води до осі насоса, що створює ймовірність появи кавітації; ускладнення організації запуску основного насоса, так як для попередньої заливки необхідно включати насос 1 (рис. 1, б) для струминного вакуум-насоса або вакуум-насоса 3, що ускладнює управління електронасосним агрегатом.
Якщо допустима геометрична висота всмоктування менше, ніж необхідна глибина нижнього рівня води у водозбірнику, або від'ємна, то необхідно застосовувати пристрої, які підкачують - погружні насоси 2 (рис. 1, в). Підкачуючі пристрої виконують функцію заповнення проточної частини основного насоса перед пуском.
3.2 Технологічний процес відкачування води
Технологічний процес відкачування води на поверхню шахти характеризується такими режимами роботи головної водовідливної установки [2]:
- пуск;
- робочий режим;
- аварійний режим;
- зупинка.
Режим пуску починається з постійного контролю рівня води у водозбірнику. При досягненні водою в водозбірнику верхнього допустимого рівня необхідно підготувати водовідливну установку до роботи. Для цього треба перед включенням насосного агрегату здійснити заливку всмоктувального трубопроводу 4 насоса і 3 водою. Закінчення процесу заливання насоса необхідно контролювати. Після заливки необхідно включити насосний агрегат на 3 закриту засувку 1 в напірному трубопроводі і відкрити її тільки після набору насосом номінальних обертів. В цьому випадку, коли насос запускається на закриту засувку, процес пуску проходить найбільш сприятливо. Якщо пуск проходить нормально, то насос приймає навантаження, в нагнітальному трубопроводі 6 встановлюється номінальний тиск, насос працює з заданою продуктивністю і режим пуску завершується.
У робочому режимі потрібен контроль за процесом відкачування води з допомогою контролю різних параметрів роботи водовідливної установки: гідравлічних і електричних. У тому числі: рівень води у водозбірнику, замулення попереднього відстійника, тиск та подачу насоса, активну потужність, яку споживає приводний електродвигун, витрату електроенергії, коефіцієнт корисної дії водовідливної установки. У випадку, коли рівень води підвищується і досягає аварійного рівня, то це означає, що приплив води в водозбірник перевищив нормальний і подачі одного насоса недостатньо. Тоді необхідно включити паралельно в роботу наступного насосний агрегат, повторивши перед цим всі операції режиму пуску, які були виконані для першого насоса. Це один з частих випадків аварійного режиму роботи, який може виникнути в процесі відкачування води.
Аварійний режим характеризується виявом відхилень від нормального режиму роботи водовідливної установки з метою уникнення негативних явищ і повернути технологічного процесу водовідливу до робочого режиму. До аварійного режиму можуть призвести ряд обставин: перегрів підшипників насоса або приводного електродвигуна, зниження продуктивності насоса, зниження тиску в трубопроводі, досягнення водою аварійного рівня у водозбірнику. У цих випадках, крім останнього, насосний агрегат відключається і до роботи вступає резервний.
Аварійний режим може виникнути і в процесі пуску. Якщо після включення приводного електродвигуна в мережу насос не розвиває номінальний тиск або номінальну подачу, то засувка закривається і електродвигун відключається від мережі, після чого здійснюється запуск другого насосного агрегату.
Якщо процес відкачування йде нормально, то рівень води знижується до контрольованого нижнього рівня. При його досягненні треба закрити засувку і відключити насосний агрегат.
4. Вибір базової апаратури автоматизації технологічного процесу водовідливу
Для контролю рівня води у водозбірнику до складу системи автоматизації приймаємо електродні датчики типу ЕД [3].
Важливим показником відхилення режиму роботи насосів від нормального є подача, тобто її зміна. Дослідження показують, що при втратах напору в трубопроводі від 5 до 15% від геометричної висоти контроль подачі тиску при застосуванні технічних манометрів дає похибку до 50% [4]. Для системи автоматизації приймаємо реле подачі типу РПН в якості контролю витрати води.
Для автоматичного контролю заливки водою насоса використовують мембранні реле. Для цієї мети приймаємо реле РДВ [3]. Чутливим елементом реле є мембрана. Мембрана бере тиск стовпа води і передає його через шток на мікроперемикач. Перевагами реле мембранного типу є: висока чутливість, швидке реагування на зміну розрядження в усмоктувальному трубопроводі, економічність у виготовленні і тривалий міжремонтний термін.
Для автоматичного контролю перегріву підшипникових вузлів насосів і двигунів водовідливних установках застосовують температурні реле. Для цієї мети застосовуємо термодатчик типу ТДЛ – 2 [4]. Принцип дії датчика заснований на властивості сплаву Вуда, який плавиться при температурі 700С. Перевагами цього датчика є невеликі габарити, візуалізація спрацьованого приладу, простота конструкції і велика надійність.
Апаратура ВАВ.1М призначена для автоматичного дистанційного і місцевого керування головними високовольтними, низьковольтними водовідливними установками, а також автоматичного і місцевого управління поодинокими водовідливними установками шахт, небезпечних по газу і пилу [5, 6]. Апаратура вибухобезпечна.
4.1 Модернізація апаратури автоматизації
Обрана базова апаратура ВАВ.1М виконує всі основні вимоги до автоматизації водовідливної установки. Проте в її функції не входить захист насосної установки від кавітації. Тому одним з напрямків вдосконалення системи автоматизації водовідливної установки є оснащення її додатковим пристроєм, який виконує дану функцію.
Рисунок 2 – Виникнення кавітації в трубопроводі
(анімація: 17 кадрів, нескінченний цикл повторення, 106 кілобайт)
Дана проблема може бути вирішена у разі застосування принципово нових технічних засобів і рішень у схемі апаратури автоматизації - дискретна інтегральна схемотехніка.
До функцій, які будуть реалізовані розроблювальним пристроєм, можна віднести:
- керуючі (прикриття засувки);
- інформаційні (про можливість виникнення кавітації і „рада диспетчеру“ про відключення насоса).
На підставі проведених досліджень, сформульованих завдань управління, а також з урахуванням технічних вимог і принципів побудови пристрою автоматизації, зобразимо структурну схему системи захисту насосної установки від кавітації БЗК, де потовщеними лініями зазначено пристрій БЗК та його взаємозв'язок з іншими блоками (рисунок 3).
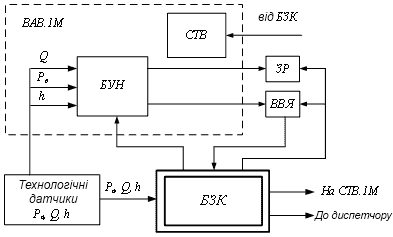
Рисунок 3 – Структурна схема системи захисту насосної установки від кавітації БЗК
Таким чином, пристрою БЗК в апаратурі ВАВ.1М буде відведена функція вироблення керуючих впливів в залежності від виникнення аварійних ситуацій в підвідному трубопроводі.
Висновки
Кавітація – це головний ворог для насоса, боротьба з яким ведеться довгі роки. Збиток заподіяний цим явищем позначається на працездатності насосного агрегату, додатковими витратами на обслуговування і простоєм технологічного процесу.
В даний момент, застосовувана апаратура для автоматизації водовідливу не має абсолютного захисту від кавітації, але постійно проводяться дослідження та пропонуються нові технічні рішення.
Таким чином, при подальшій роботі над даною темою буде спроектовано пристрій, який дозволить отримувати інформацію про можливості виникнення кавітації, прогнозувати аварійні ситуації і економити споживану електроенергію шляхом зменшення кількості пусків.
Під час написання даного реферату магістерська робота ще не завершена. Остаточне завершення: червень 2018 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Попов В.М. Шахтные насосы (теория, расчет и эксплуатация): Справочное пособие – М.: Недра, 1993.– 224 с.
- Тимошенко Г.М. Научные основы проектирования и эксплуатации насосных установок в переходных режимах. Киев; Донецк: Вища шк. Головное изд–во, 1986. – 127 с.
- Попов В.М. Водоотливные установки: Справочное пособие. - М: Недра, 1990.–294 с.
- Груба В.И. Технические средства автоматизации в горной промышленности: Учебное пособие/ В.И. Груба, Э.К. Никулин, А.С. Оголобченко. Под общей редакцией докт. техн. наук, проф. В.И. Грубы. – Киев: ИСМО, 1998. – 373 с.
- Толпежников Л.И. Автоматическое управление процессами шахт и рудников, – М.: Недра, 1985. – 352 с.
- Карелин В.Я. Насосы и насосные станции – М.: Недра, 1979. – 376 с.
- Гейер В.Г., Тимошенко Г.М. Шахтные вентиляторные и водоотливные установки – М.: Недра , 1987.–229 с.