Измерение уровня жидкости в топливном баке ракеты
1. Введение
Топливо резервуара окислителя и горючего резервуара поступает в камеру сгорания ракетного двигателя. Одновременная подача топлива в заданной пропорции обеспечивает эффективную работу ракетного двигателя. Синхронная подача топлива в заданной пропорции обеспечивает эффективную работу ракетного двигателя. Эффективная работа зависит от точного измерения уровня топлива в баке. Для этой цели топливный бак имеет систему управления топливом. Система представляет собой вертикальный измерительный канал с датчиками внутри канала для фиксации свободного уровня жидкости в канале (рис. 1) .
Вертикальный канал и топливный бак являются сообщающими сосудами. Снижая уровень топлива в баке, уровень топлива уменьшается в канале. Когда уровень топлива в канале достигает датчика, происходит активация датчика. Сигнал поступает в систему управления топливом. В результате расход топлива меняется. Таким образом, уровень топлива в канале определяет уровень топлива в баке. Проблема в том, что свободная поверхность топлива не совпадает в канале и резервуаре. Ошибка измерения уровня топлива приводит к неэффективному расходу топлива. В результате ракетный двигатель работает не оптимально, а в танках - «лишнее» количество топлива.
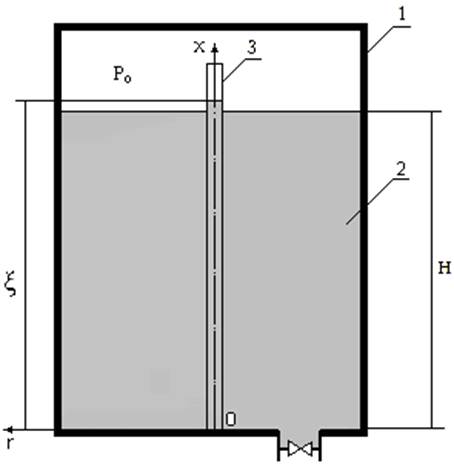
Рис 1.
Схема топливного бака. 1- резервуар, 2- топливо, 3- измерительный канал,
![]() - давление газа,
- давление газа,
![]() - уровень жидкости в канале,
- уровень жидкости в канале,
![]() - уровень жидкости в баке,
- уровень жидкости в баке,
![]() - координатная ось.
- координатная ось.
Рассматривается проблема математического моделирования потока жидкости в вертикальном канале системы управления уровнем топлива ракеты. Поток жидкости в вертикальном измерительном канале описывается нестационарным уравнением движения параболического типа. Нестационарное уравнение движения было решено многими исследователями. Проблемы, обсуждаемые в [ 1 - 3 ], могут быть называемый классикой. Статья [ 1 ] рассматривает поток ламинарной текучей среды в цилиндрическом канале от остановки. Пульсирующее движение представлено в [ 2 ]. Результаты расчета периодического движения сравниваются с экспериментальными данными. Уравнения движения решаются операционным исчислением.
В [ 5 ] показано, что при практическом использовании ракетных двигателей соотношение окислителя и горючего нарушается. Что приводит к большему или меньшему открытию дроссельной заслонки. Статья [ 6 ] представляет нелинейную математическую модель для моделирования пульсирующего потока. Управляющие уравнения численно решаются с помощью комбинированной схемы, включающей двухступенчатый метод Лакса-Вендроффа с вариантом трапецеидального интегрирования метода характеристик на трубы . Справедливость математической модели и методологии была проверена путем сравнения аналитических прогнозов с экспериментальными результатами.
Работа [ 7 ] представляет нестационарный поток неньютоновской жидкости из-за мгновенного закрытия клапана. с помощью численного подхода решаются соответствующие управляющие уравнения. Для интегрирования по времени используется схема Рунге-Кутты четвертого порядка, а для дискретизации пространственных производных используется центральная разностная схема. Для проверки предложенной математической модели и численного решения проведено сравнение с соответствующими экспериментальными результатами из литературы.
В работе [ 8 ] представлен метод характеристик (MOC) для моделирования нестационарного потока в конвейере. Однако относительно сложный метод неявного (MOI) обеспечивает преимущества безусловной конвергенции и взаимной независимости между параметрами времени и пространства. Это исследование объединяет MOC и MOI для моделирования процессов нестационарного течения трубопровода и переходных процессов гидроэнергетики.
В документе [ 9 ] представлены результаты исследования реакции несжимаемой жидкости в круговой микротрубке на внезапное время- независимый перепад давления. Решения задачи были получены аналитически с использованием метода преобразования Лапласа и численно с использованием метода Больцмана решетки.
Документ [ 10 ] представлены устойчивые и нестационарные потоки в слабо изогнутой трубе для широкого диапазона чисел Рейнольдса, которые рассматриваются с прямым численным моделированием. В статье [ 11 ] полностью разработанный импульсный поток несжимаемой ньютоновской жидкости (сырой нефти) через трубопровод моделируется и анализируется с использованием метода конечных элементов и сравнивается с результатами, основанными на аналитическом решении. Поток генерируется периодическим градиентом давления, наложенным на постоянный поток Пуазейля. Результаты показывают хорошее согласие аналитических и численных решений на основе метода конечных элементов для ньютоновской жидкости при нестационарных режимах.
В статье [ 12 ] динамическое взаимодействие между трубой и нестационарными потоками анализируется на основе экспериментов и численных моделей. В статье [ 13 ] представлен метод характеристик для решения одномерной модели потока жидкости в трубопроводных сетях.
Целью данного исследования является разработка математической модели потока жидкости в вертикальном измерительном канале системы измерения уровня топлива ракеты .
2. Математическая постановка задачи
В начальный момент времени
![]() , уровень топлива в баке и в канале одинаковый (
, уровень топлива в баке и в канале одинаковый (
![]() ).
Свободный верхний конец цилиндрического канала расположен над уровнем топлива в баке, поэтому возможен поток топлива из бака в канал в этом месте. Нижнее основание цилиндрического канала совпадает с дном бака, и топливо свободно передается между резервуаром и каналом. Над свободной поверхностью топлива (
).
Свободный верхний конец цилиндрического канала расположен над уровнем топлива в баке, поэтому возможен поток топлива из бака в канал в этом месте. Нижнее основание цилиндрического канала совпадает с дном бака, и топливо свободно передается между резервуаром и каналом. Над свободной поверхностью топлива (
![]() ) в резервуаре, и канал поддерживает постоянное давление
) в резервуаре, и канал поддерживает постоянное давление
![]() (давление наддува).
(давление наддува).
Уровень топлива в баке зависит от закона
![]() .
.
![]() - понижение скорости подачи топлива в баке. Известно, что уровни жидкости в резервуаре и канале не совпадают. Необходимо определить уровень жидкости в цилиндрическом канале в произвольное время. Введем систему координат, начало которой было помещено в центр нижней базы цилиндрического канала.
- понижение скорости подачи топлива в баке. Известно, что уровни жидкости в резервуаре и канале не совпадают. Необходимо определить уровень жидкости в цилиндрическом канале в произвольное время. Введем систему координат, начало которой было помещено в центр нижней базы цилиндрического канала.
В качестве модели для потока используется нестационарное движение вязкой несжимаемой жидкости в цилиндрическом канале
![]() (1)
(1)
граничные условия задачи
![]()
начальное условие задачи
![]() ,
,
где
![]() - скорость жидкости в канале,
- скорость жидкости в канале,
![]() - давление,
- давление,
![]() - плотность,
- плотность,
![]() - время,
- время,
![]() -
кинематическая вязкость
,
-
кинематическая вязкость
,
![]() - ускорение силы тяжести.
- ускорение силы тяжести.
3. Метод решения проблемы
Средняя скорость топлива в цилиндрическом канале
![]() . Умножая левую и правую части уравнения (1) на r. Запишем отдельные члены уравнения движения
. Умножая левую и правую части уравнения (1) на r. Запишем отдельные члены уравнения движения
![]() ,
, ![]() ,
,
![]() ,
,
![]() (2)
(2)
где
![]() трение,
трение,
![]() трение стенки,
трение стенки,
![]()  
динамическая вязкость,
 
динамическая вязкость,
![]() радиус цилиндрического канала
.
радиус цилиндрического канала
.
Мы используем формулы (2) и записываем уравнение (1) в виде (скошенные скобки со средней скоростью в дальнейшем опущены)
![]()
or
![]() (3)
(3)
Выберите в цилиндрическом канале объем жидкости двумя поперечными сечениями на расстоянии
![]() . Запишите баланс давления и трения
. Запишите баланс давления и трения
![]() .
.
Получаем следующее выражение
![]() (4)
(4)
where
![]() коэффициент трения при трении.
коэффициент трения при трении.
Тогда мы используем уравнение Дарси-Вейсбаха
![]() ,
,
, объединяющей уравнение Дарси-Вейсбаха и уравнение (4)
![]() ,
,
, где мы находим
![]() (5)
(5)
Подставим (5) в уравнение (3) и получим следующее выражение
![]() (6)
(6)
Рассчитаем градиент давления следующих условий: давление линейно уменьшается от давления наддува
![]() над свободной поверхностью топлива до давления
над свободной поверхностью топлива до давления
![]() . Градиент давления
. Градиент давления
![]() (7)
(7)
где
![]() координаты свободной поверхности топлива в измерительном канале.
координаты свободной поверхности топлива в измерительном канале.
В силу формулы (7) уравнение движения (6) принимает вид
![]() (8)
(8)
мы добавляем начальные условия и получаем задачу Коши
![]() (9)
(9)
4. Результаты
Выполнено численное решение задачи:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() . Решение краевой задачи задается численно в приложениях Mathcad пакета. Результаты решения показаны на графиках (Рис. 2 - Рис 4)
. Решение краевой задачи задается численно в приложениях Mathcad пакета. Результаты решения показаны на графиках (Рис. 2 - Рис 4)
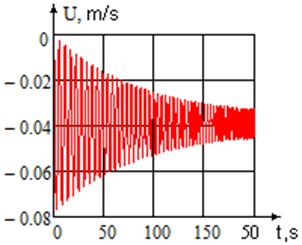
Рис 2. Изменение средней скорости жидкости в канале.
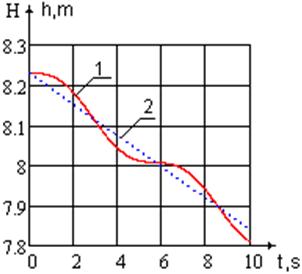
Рис 3. Уровень жидкости: 1- в канале, 2- в баке .
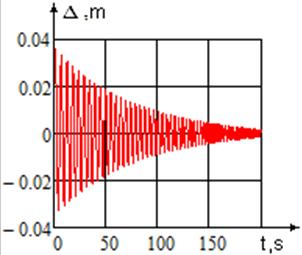
Рис 4.
Ошибка измерения уровня жидкости в диапазоне
![]() s,
s,
![]() .
.
5. обсуждение
Мы можем видеть (рис. 2), что средняя скорость жидкости в канале имеет уменьшающиеся амплитудные колебания. Уровень жидкости в цилиндрическом канале колеблется относительно уровня жидкости в топливном баке (рис. 3). Причиной колебаний является инерция жидкого столба в канале. В начальный момент жидкость имеет очень большое ускорение, что вызывает большую инерционную силу. Следовательно, сила инерции является причиной колебаний жидкости в канале. Суммирование в уравнении движения, которое определяет процесс колебаний, является градиентом давления.
Флуктуации имеют переменный период. Математический эксперимент показывает, что период колебаний уменьшается со временем: во временном интервале
![]() период колебаний
период колебаний
![]() ; в интервале времени
; в интервале времени
![]() период колебаний
период колебаний
![]() . По характеристикам потока, существенно зависящим от ускорения, поэтому для
. По характеристикам потока, существенно зависящим от ускорения, поэтому для
![]() и
и
![]() в диапазоне
в диапазоне
![]() амплитуда колебаний уменьшается до
амплитуда колебаний уменьшается до
![]() , а период сводится к
, а период сводится к
![]() . По сравнению с сопротивлением канала сопротивления сопротивление было незначительным, поэтому для
. По сравнению с сопротивлением канала сопротивления сопротивление было незначительным, поэтому для
![]() и
и
![]() в диапазоне
в диапазоне
![]() амплитуда колебаний практически не изменяется
амплитуда колебаний практически не изменяется
![]() и период колебаний уменьшается до
и период колебаний уменьшается до
![]() .
.
На графике (рис. 4) показана погрешность измерения уровня жидкости в зависимости от времени. Мы видим, что величина ошибки является периодической функцией, в которой амплитуда и период колебаний со временем снижаются. Максимальная ошибка при определении уровня топлива в баке наблюдается в начале полета ракеты и достигает значения
![]() . Ошибка измерения уровня жидкости не является регулярной, что затрудняет ошибки настройки в программном обеспечении.
. Ошибка измерения уровня жидкости не является регулярной, что затрудняет ошибки настройки в программном обеспечении.
Обратите внимание, что датчик может работать как в положительном, так и в отрицательном отклонении от фактического положения уровня топлива в баке. В этом случае ошибка удваивается. Учитывая размер диаметра ракеты, мы говорим о сотнях топливных килограммов.
6. Вывод
Результаты показывают, что датчики уровня могут предоставлять ложную информацию в зависимости от места привязки. Ошибка не является систематической. Экспериментальные исследования отнимают много времени и стоят дорого. Поэтому математический эксперимент является наиболее эффективным методом решения проблемы. Задача состоит в том, чтобы сигнал от датчика соответствовал фактическому уровню жидкости. Для этой цели датчики должны быть установлены в точках пересечения функций
![]() и
и
![]() .
.
Следует отметить, что математическая модель течения жидкости в вертикальном канале систем управления не учитывает флуктуации жидкости в ракете топливного бака и некоторые особенности конструкции ракеты. Такое исследование будет сделано в следующей статье.