
Реферат за темою випускної роботи
Зміст
- 1. Призначення, основні характеристики та коло вирішуваних завдань металошукачем
- 2. Огляд методів і засобів виявлення металевих предметів
- 2.1 Метод індукційного балансу – IB/TR
- 2.2 Метод зриву резонансу – OR
- 2.3 Автогенераторний металошукач
- 2.4 Імпульсні металошукачі
- 2.5 Однокотушечний металошукач індукційного типу
- Висновки
- Перелік посилань
1. Призначення, основні характеристики та коло вирішуваних завдань металошукачем
Металошукачем є індуктивний прилад, що дозволяє виявити предмети з металу в слабо провідному середовищі. Він може працювати в воді, визначати цінне вміст стіни, ґрунту, деревини, одягу, продуктів харчування і багажу. Стрімкий розвиток мікроелектроніки забезпечило справжніх шукачів цінних предметів сучасним компактним і надійним металошукачем [1].
Дані прилади використовуються фахівцями в професійних видах діяльності, а також їх набувають заради розваги. Наприклад, зараз дуже модно відправлятися з подібним технічним оснащенням на пошуки скарбів, монет, дорогоцінних металів, захоплюючих пригод.
Рисунок 1.1 – Використання металошукача
При виборі металошукача (металодетектора) необхідно чітко розуміти в якому середовищі він буде працювати. Також важливо враховувати, який обсяг предмета і на якій глибині він буде шукати. Металодетектори, технічні характеристики яких дозволяють легко виявити монету під триметровим шаром ґрунту можуть не побачити її на поверхні, і навпаки.
Розглянемо основні технічні характеристики [2]:
- робоча частота;
- чутливість;
- діскрімінатор;
- балансування ґрунту;
- цілевказування;
- вага;
- додаткові функції.
Принцип дії і робоча частота дають основну характеристику можливостей пристрою. Вони показують, до якого типу можна віднести прилад: від простого ґрунтового до професійного. Без спеціальних навичок настройки, професійний металодетектор мало чим відрізняється від більш простих моделей, тому новачкам краще починати з бюджетних ґрунтових металошукачів. Ефективності їх роботи буде достатньо для успішного пошук цінностей.
Чутливість – показує на якій глибині пристрій здатний знайти предмет, розміром з монету. Подивившись в технічний паспорт, можна побачити дві цифри - мінімальну і максимальну глибину виявлення. Найчастіше, цей показник варіюється від 10-50 см до 60-150 см. Однак є глибинні моделі, створені для виявлення предметів під 5-ти метровим шаром землі.
Діскрімінатор – дозволяє металодетекторів реагувати тільки на певний вид металу. Чи знаєте ви скільки железосодержащего сміття можна знайти під землею? Фольга від сигаретних пачок, алюмінієві банки, кришечки від пляшок – детектор реагує на все це, значно додає роботи оператору. Налаштувавши дискримінатор, можна пропускати все це сміття і зосередитися на пошуках тільки золота, або тільки міді. Завдяки дискримінатори, можна значно спростити роботу оператора, тому на цей показник слід звернути особливу увагу. Чим більше кількість програм закладено в пам'ять діскрмінатора, тим легше працювати з металошукачем.
Балансування ґрунту – дозволяє налаштувати пристрій на той тип ґрунту, в якому знаходиться мішень. Перепади мінералізації ґрунту можуть давати помилкові сигнали, що ускладнює роботу приладу. Більшість детекторів налаштовують цей показник автоматично.
Цілевказівку можна віднести до додаткових функцій. Суть цієї програми зводиться до налаштування пошуку на певний розмір мішені.
Всі перераховані вище технічні характеристики допомагають зрозуміти можливості металодетектора. Однак успішність його роботи залежить від налаштувань, які вносить користувач. Розглянемо їх докладніше.
Завдання металошукача залежать від його типу і робочого напрямки [3]:
- Ґрунтовий металошукач – призначений для пошуку скарбів, монет і ювелірних виробів, металобрухту. Як правило, побудований за індукційної технології. Має безліч налаштувань, DSP-процесор, дискримінатор металів – спеціальну функцію для визначення металу, з якого імовірно складається об'єкт в землі. Глибина виявлення об'єктів від 20 см до 1 метра;
- Військовий металошукач (міношукач) – призначений для пошуку переважно хв. Як правило, побудований на принципі
прийом-передача
. Має мінімум налаштувань. Глибина виявлення міни від 20 см (радянський міношукач ІМП) до 1 метра (сучасні військові міношукачі ІМП-2); - Доглядових металошукач – ручний металошукач призначений для служб безпеки. Служить для виявлення на тілі людини металевих предметів (пістолет, ніж). Дальність виявлення пістолета Макарова – до 25 см;
- Арочний (рамковий) металошукач – доглядових металошукач, який використовується для контролю великих потоків людей, наприклад, в метро, на вокзалах. Являють собою рамку, через яку проходить людина;
- Глибинний металошукач – призначений для пошуку великих глибинних цілей, таких, як скриню з золотом. Має дві рознесені один від одного котушки, або одну велику рамку з котушкою. Заснований на принципі
прийом-передача
. Відмінною особливістю даного виду металошукачів є те, що він реагує не тільки на метали, а й на будь-які зміни в глибині ґрунту (переходи від однієї ґрунту до іншої, старі фундаменти будівель і т. д.). Глибина виявлення об'єктів від 50 см до 3 метрів; - Магнітометр – призначений для пошуку феромагнітних предметів (наприклад, залізо). Даний вид металошукачів найкомпактніший і найчутливіший, так як пошукова головка може поміститися на долоні. Також магнітометри можуть застосовуватися і для пошуку золота, міді, алюмінію. Але для цього потрібен додатково збудник, який буде робити з неферомагнітних металів, образно кажучи, електромагніти.
2. Огляд методів і засобів виявлення металевих предметів
Кожен металошукач по-своєму індивідуальний. Одна з відмінностей і виразів індивідуальності металошукача – це вибір методу, на якому буде засновано побудову металошукача. Існує безліч методів реалізації.
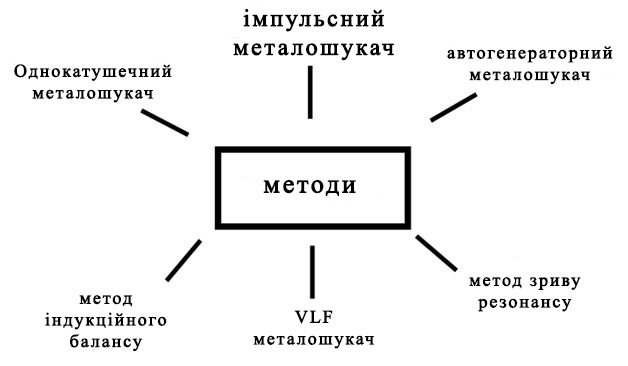
Рисунок 2.1 – Методи реалізації металошукача
2.1 Метод індукційного балансу – IB/TR
Пошукову головку утворюють дві котушки, розташовані в одній площині і збалансовані так, що при подачі сигналу в передавальну котушку на виходах приймальної присутній мінімальний сигнал. Передає котушка часто включається в контур LC-генератора. Вимірюваним параметром є амплітуда сигналу на приймальній котушці і фазовий зсув між переданим і прийнятим синусоїдальними сигналами. Такі металошукачі мають робочу частоту 80-100 kHz. Вони можуть виявляти невеликі об'єкти на порівняно великій глибині (30-35 см), проте вони не приносять користі при пошуку на сильно мінералізованих фунтах і морських пляжах [4].
Метод індукційного балансу з використанням дуже низьких робочих частот – VLF/TR
Було виявлено, що при зниженні робочої частоти нижче 20 kHz можна відбудуватися від впливу фунта, глибина дії приладу при цьому дещо знижується, зате різко зростає стабільність роботи, і зникають помилкові сигнали. Такі прилади отримали назву VLF/TR, що розшифровується як металошукач типу передавач-приймач, що працює на дуже низьких частотах [5].
VLF – метод дозволяє побудувати високочутливі прилади з хорошим розрізненням металів за рахунок аналізу фазових характеристик. Схемотехніка приладів досить складна, котушки вимагають прецизійної балансування. На основі цього методу зараз будується більшість серійних приладів, у тому числі і комп'ютеризованих. Дискримінація об'єктів і відбудова від ґрунту в таких приладах здійснюється порівняно просто за допомогою фазозсувних ланцюгів.
Принцип TR (або його різновид VLF/TR) передбачає аналіз фазових характеристик сигналу, тому ці прилади легко розрізняють чорні і кольорові метали, відбудовуються від сміття і ґрунту. Вони мають високу чутливість і роздільну здатність, яка залежить від діаметра пошукової котушки - чим вона більша, тим глибше виявлення, але тим важче шукати дрібні предмети.
Недолік таких приладів полягав в тому, що відбудування від ґрунту не можна було виконувати одночасно з дискримінацією і оператор за допомогою перемикача повинен вибирати або той, або інший режим. Такі прилади випускалися в США і Англії протягом 10 років аж до 1980 р, коли вони були замінені на так звані динамічні металошукачі.
В кінці 70-х рр. XX ст. американець Дж. Пейн розробив схему, що дозволяє проводити одночасно і дискримінацію і відбудування від ґрунту.
Перші пристрої такого типу необхідно було дуже швидко переміщати для досягнення прийнятної глибини їх дії, що було для оператора вельми втомлює. Біліше пізні моделі (за рахунок ускладнення схеми) дозволяли працювати вже з меншими швидкостями переміщення котушки без втрати глибини.
На початку 80-х рр. металошукачі стали важкими і складними в налаштуванні. По суті, один прилад включав в себе чотири металошукача різних типів. Американська фірма Fisher Researh Laboratory своєчасно відреагувала на прохання шукачів скарбів зробити більш простий, але не менш чутливий прилад і на основі останніх досягнень мікроелектроніки розробила металошукач 1260-х з автопідстроюванням порога, що працює на дуже низькій частоті. Він мав лише кілька органів управління і не вимагав ніякої ручної настройки. Це легкий, зручний в роботі і чутливий до дрібних об'єктів прилад, успішно діє на поганих мінералізованих ґрунтах. Його модифікація 1266-х випускалася до 2003 р.
Цей металошукач став називатися динамічним
, хоча, по суті, він відноситься до типу VLF/TR. Попередні статичні металошукачі типу VLF/TR практично перестали проводитися, і всі провідні фірми швидко переключилися на виробництво приладів, які використовують вказаний динамічний принцип. Численні дрібні компанії, які не встигли це зробити, були змушені припинити своє існування. З тих пір в світі залишилося лише близько десятка фірм, які виробляють металошукачі.
Метод індукційного балансу з рознесеними котушками – RF
Це високочастотний варіант TR, де передає і приймальна котушки утворюють не плаский трансформатор, а рознесені в просторі і розташовані перпендикулярно один до одного. Приймальна котушка приймає відбитий від металевої поверхні сигнал, що випромінюється передавальною котушкою. Цей метод використовується в глибинних приладах і характеризується нечутливістю до дрібних об'єктів і неможливістю розрізняти чорні і кольорові метали [6].
2.2 Метод зриву резонансу – OR
Аналізованих параметром є амплітуда сигналу на котушці коливального контуру, налаштованого близько до резонансу з подаються на нього сигналом від генератора. Поява металу в поле котушки викликає або досягнення резонансу або відхід від нього, в залежності від виду металу, що призводить до збільшення або зменшення амплітуди коливань на котушці. Цей метод, так само як і BFO розроблявся радіоаматорами.
2.3 Автогенераторний металошукач
Відомі автогенераторні металошукачі для виявлення металевих включень в масі неелектропровідних матеріалу виконані у вигляді лампового генератора з виносним коливальним контуром, котушка індуктивності, яка служить параметричних датчиком металу. До недоліків відомих автогенераторних металошукачів слід віднести їх низьку чутливість і погану перешкодозахищеність [7].
В описуваному металошукачі ці недоліки усунуті завдяки тому, що симетричні котушки зібраного за схемою диференціального трансформатора датчика включені одна – в ланцюг позитивного зворотного зв'язку, а інша – в ланцюг негативного зворотного зв'язку. Схема налаштована з переважанням позитивного зворотного зв'язку.
Наближення металу до датчика збільшує амплітуду коливань генератора, а подальше просування металу при наближенні його до котушки, включеної в ланцюг негативного зворотного зв'язку, зменшує амплітуду цих коливань.
Автогенераторний металошукач з індуктивним диференціальним датчиком металу, що відрізняється тим, що, з метою збільшення надійності, чутливості і перешкодозахищеності, вказаний датчик утворює ланцюг позитивного і негативного зворотного зв'язку і відрегульований па переважання позитивного зворотного зв'язку з тим, щоб наближення виявленого металу викликало збільшення амплітуди коливань автогенератора , а подальше просування металу – зменшення амплітуди вказаних коливань.
2.4 Імпульсні металошукачі
Принцип роботи імпульсних металошукачів, заснований на тимчасовому поділі сигналів випромінювання і прийомі відбитого сигналу. Тобто в котушку на короткий проміжок часу закачується імпульс великої амплітуди (десятки або сотні вольт), при впливі і металевий об'єкт такими імпульсами, на поверхні металу виникають вихрові струми. Ці струми і є джерелом сигналів для металошукача. Їх реєстрацію металошукач виробляє в перервах між імпульсами. Тому котушка металошукача служить відразу і приймальні і передавальної [8].
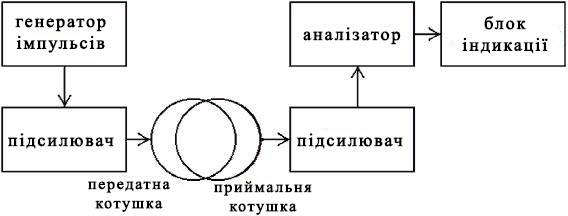
Рисунок 2.2 – Принципова схема імпульсного металошукача
Імпульсні металошукачі є найбільш чутливими, серед всіх типів металодетекторів, і мають найкращу глибину пошуку.
2.5 Однокотушечний металошукач індукційного типу
Прилад даного типу має в складі датчика одну котушку будь-якій зручній форми, збуджується змінним сигналом. Поява поблизу датчика металевого предмета викликає поява відбитого, який наводить
в котушці додатковий сигнал електричний. Залишається цей додатковий сигнал тільки виділити [9].
Металошукач індукційного типу отримав право на життя, головним чином, через основного недоліку приладів за принципом передача-прийом
– складність конструкції датчиків. Ця складність призводить або до високої вартості і трудомісткості виготовлення датчика, або до його недостатньої механічної жорсткості, що зумовлює появу хибних сигналів при русі і знижує чутливість приладу. Якщо поставити собі за мету, усунути у приладів за принципом передача-прийом
цей недолік, то можна прийти до незвичайного висновку – випромінююча і приймальня котушки у металошукача повинні бути об'єднані в одну! Справді, дуже небажані переміщення і вигини однієї котушки відносно іншої в даному випадку відсутні, так як котушка тільки одна і вона одночасно і випромінює, і приймальня. У наявності також гранична простота датчика. Платою за ці переваги є необхідність виділення корисного відбитого сигналу на тлі значно більшої сигналу збудження випромінює/приймальні котушки.
Індукційні металошукачі поєднують в собі високу чутливість і селективність металошукачів за принципом передача-прийом
і простоту конструкції датчика металошукачів на биття.
Актуальною стає задача компенсації температурного дрейфу параметрів котушки датчика металошукача.
Висновки
виходячи з вивченого мною матеріалу, можна виділити імпульсний металошукач. Його плюси: простота в розробці, вони є найбільш чутливими, принцип роботи передача-прийом
дає можливість знаходити метали на досить великих глибинах. Мінуси: не можна налаштувати пошук на дискримінацію металів. Даний тип металошукача і був обраний для магістерської роботи.
Під час написання даного реферату магістерська робота ще не має завершеного статус. Остаточне завершення планується на літо 2018 р. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати. Звертатися можна за допомогою електронної пошти: rozhkov.alex@inbox.ru.
Перелік посилань
- Наука и техника. Назначение металлоискателя [Электронный ресурс]; Режим доступа: https://don-news.net/nauka-i-tehnika/3511-naznachenie-metalloiskatelja.html.
- Принцип работы металлоискателя. [Электронный ресурс]; Режим доступа: http://perstni.com/magazine/metalloiskateli/printsip-raboti-metalloislkatelya.html.
- Википедия. Металлоискатель. [Электронный ресурс]; Режим доступа: https://ru.wikipedia.org/wiki/Металлоискатель.
- Типы металлоискателей. [Электронный ресурс]; Режим доступа: http://habaroved.net/forum/77-148-1.
- Энциклопедия радиоэлектроники и электротехники. Различные виды металлоискателей и их принцип действия. [Электронный ресурс]; Режим доступа: http://www.diagram.com.ua/list/metalloiskateli/metalloiskateli092.shtml.
- Принцип действия металлоискателя. [Электронный ресурс]; Режим доступа: http://www.sledovnet.ru/article_27.html.
- Принцип действия металлоискателей. [Электронный ресурс]; Режим доступа: http://www.plongeur.ru/page_215.html.
- Импульсный металлодетектор. [Электронный ресурс]; Режим доступа: https://acdc.foxylab.com/node/47.
- А. Щедрин Новые металлоискатели для поиска кладов и реликвий. [Электронный ресурс]; Режим доступа: http://izmer-ls.ru/met/sche1-1.html.