
Abstract
Сontents
- Introduction
- 1. Theme urgency
- 2. Aims and objectives of the study
- 3. Communication System Overview
- 4. Overview of the radio module for creating a communication system
- Conclusion
- References
Introduction
The rapid development of unmanned aerial vehicles (UAV) and the development of radio electronics make it necessary to constantly review the requirements for the communication channel and ground control systems (NKU). To date, it has become possible to control the autopilot in the complete absence of communication between the aircraft and the ground control complex. However, this does not mean that the radio link may be excluded from the UAV. Because of the increased complexity and the cost of the complex, during its operation, constant monitoring of the condition of airborne aircraft is required. In addition, sometimes there is a need to adjust the flight parameters of the UAV.
1. Theme urgency
The development of UAV is one of the most promising avenues for the development of modern aviation [1]. UAVs are gaining popularity. They are used for aerial photography, patrolling, geodetic surveying, monitoring of various objects, support for search and rescue operations, protection of the boundaries of private property and even for the delivery of home purchases. All these tasks can be solved by unmanned vehicles around the clock practically in all weather conditions and without risk to human life [7].
The ability to provide a stable connection is one of the most important characteristics that determine the operational capabilities of the UAV control complex and ensures that the information obtained by the UAV is communicated in real time mode to operational personnel [1]. In addition, the actual task is also the transfer of payload data of the aircraft to the NKU. In this case, it is required to provide a large data transfer with the given bandwidth requirements, bit error probability, etc.
2. Aims and objectives of the study
The aim of this dissertation is to research and search for new opportunities for the introduction of a UAV communications system for use in industrial facilities.
To achieve results, the following tasks were identified:
- general analysis of communication systems;
- choice of hardware and modeling environment;
- modeling of the communication system;
- testing of the received system and its analysis;
- elimination and minimization of errors that have arisen.
The basic problems at the decision of tasks in view:
- choice of radio module and frequency range;
- low data transfer rate;
- permission to use airspace and frequency range.
3. Communication System Overview
Many modern UAV systems require the availability of high-speed data transmission lines for the performance of assigned tasks [2]. A common technology for information transmission is the continuous translation of the image as it is received in a digital or analog format, the structure of which does not change during the entire flight.
It should be taken into account that the continuous translation of images has the following features:
- the possibility of a visual absence of the required features;
- the possibility of obtaining false information;
- the possibility of detecting a UAV and its breaking, because of the constant emission of the signal.
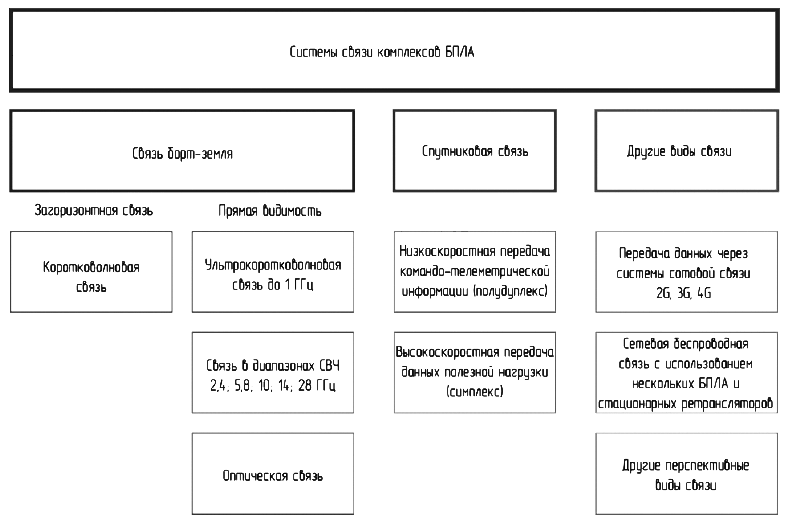
As a rule, there are at least two communication systems on board the UAV: ??duplex/half duplex equipment serves for the transmission of command and telemetry information and a simplex system for the transfer of payload information [3]. The transfer of command and telemetry information from the NKU to the UAV is carried out frequently at low speed, as well as the transmission of telemetric information from the UAV to the NKU. The payload information transmission equipment is designed for one-way high-speed information transfer of payload from the UAV on the NKU. In Fig. 1 shows possible options for the implementation of communication systems for UAV systems [3].
4. Overview of the radio module for creating a communication system
Currently, the market provides an extensive selection of radio modules capable of providing solutions to problems of interest to us. Next, one of the modules will be considered, which is proposed to achieve the goal.
To ensure communication between the UAV and the NKU, the technology LoRaWAN (Long Range Wide Area Networks) will be used. LoRaWAN is an open, network-effective network communication protocol that provides a significant advantage over Wi-Fi and cellular networks due to the ability to deploy inter-machine communications. On the basis of this protocol, an easy-to-use hardware and software package was created that allows the creation of systems with the possibility of wireless data transmission [5].
The speed of data transfer using the LoRaWAN protocol in the LoRa system lies in the range 0.3 - 11 kbps. For Europe, one GFSK-channel (Gaussian Frequency-Shift Keying, GFSK) is available to transfer information with a data stream of 50 kbit/s. In North America, due to the limitations imposed by the FCC (Federal Communications Commission), the minimum data rate is 0.9 kbit/s, but the terminal chip or the so-called PHY (integrated circuit designed to perform physical level network model OSI) is able to provide more options. Thus, the SX1272 IC supports data rates from 0.3 to 37.5 kbps, and the SX1276 supports from 0.018 to 37.5 kbps [5].
To extend the life of the battery/battery in the end device and the total network bandwidth, the LoRaWAN network server controls the data rate and the RF output of each end device individually [5]. Control is carried out using Adaptive Data Rate (ADR) algorithm [5]. This is critical for high network performance and allows you to implement its necessary scalability. The network can be deployed with minimal investment in its infrastructure and with the capacity that is required for this particular application. If many gateways are deployed, then ADR technology will shift the data rate upwards, which will scale the network capacity in the range of 6 to 8 times [5].
Adaptive Data Rate (ADR) is a method in which the actual data rate is regulated in such a way as to ensure reliable delivery of data packets, to ensure optimal network performance and the necessary scale for downloading it. For example, nodes closer to the gateway will use a higher data rate (hence, the active transmission time will be reduced by the radio channel) and lower power output [6]. Only the most remote nodes will use the low data rate and high transmitter output power. ADR technology can make the necessary changes to the network infrastructure and thus compensate for various losses on the signal transmission path. To extend the life of the end-device battery and the overall network bandwidth, the LoRa network infrastructure manages the data rate, and the RF output is adjusted by using ADR technology for each end device individually.
LoRa technology significantly increases receiver sensitivity and, like other spread spectrum modulation methods, uses the entire bandwidth of the channel for signal transmission, which makes it resistant to channel noise and insensitive to offsets caused by inaccuracies in frequency tuning using inexpensive reference quartz resonators. The LoRa modem on the combined GMSK channel has the ability to suppress interference up to 19.5 dB (due to Gaussian filtering). In other words, it can receive and demodulate signals at 19.5 dB below the level of interference or noise. This immunity to interference makes it possible to use a simple and inexpensive system with LoRa modulation in places where there is a heavy spectral situation, or in hybrid communication systems. In these cases, the use of LoRa technology allows to extend the coverage range of communication, while other variants of modulation here are powerless.
The output power directly at the chip output is +20 dBm, and on the antenna, after matching and filtering, as a result of unavoidable losses, it is already +19 dBm ± 0.5 dB. Different states and even their regions have different rules for the maximum permissible capacity. To achieve the permitted maximum and, correspondingly, the maximum coverage area, the LoRaWAN protocol allows setting different output power values acceptable for different locations of the system [5].
Due to its high sensitivity, LoRa technology is suitable for devices with low energy consumption requirements and high communication stability over long distances.
 Рис. 2 – The connection between the NKU and the UAV via the LoRa protocol
Рис. 2 – The connection between the NKU and the UAV via the LoRa protocol(animation: 11 frames, 7 repetitions, 29 kilobytes).
Conclusion
Thus, the embedded communication system, based on the LoRaWAN protocol, will be able to provide a large radius of communication with the drone and will provide continuous transmission of large volumes of data.
At the current stage of the study, the following results were obtained:
- various types and ways of communication of UAVs are investigated, their advantages and disadvantages are studied;
- selected components to create a communication system;
- the available frequency ranges are defined.
When writing this essay, the master's thesis is not yet complete. Final completion: May 2018. The full text of the work and materials on the topic can be obtained from the author or his supervisor after the specified date.
References
- Антонов О. Е. Настоящее и будущее БПЛА [Электронный ресурс] // Режим доступа: http://flot.com/...
- Боев Н.М. Анализ командно-телеметрической радиолинии связи с беспилотными летательными аппаратами // Вестник Сибирского государственного аэрокосмического университета им. акад. М.Ф. Решетнева. – 2012. – Вып. 2 (42). – С. 86-91.
- Боев Н.М. Адаптивное изменение параметров цифровых систем связи комплексов беспилотных летательных аппаратов // 22-я Международная Крымская конференция "СВЧ-техника и телекоммуникационные технологии", 10–14 сент., 2012 г.: Материалы конф.: в 2 т. – Т. 1.
- Самарский А.А., Гулин А.В. Численные методы: Учеб. пособие для вузов. – М.: Наука. Гл. ред. физ-мат. лит., 1989. – 432 с.
- lora-alliance [Электронный ресурс]: LoRaWAN For Developers – электронные данные, – режим доступа https://www.lora-alliance.org/ – дата доступа: ноябрь 2017.
- MIT Technology Review [Электронный ресурс]: Six Ways Drones Are Revolutionizing Agriculture – электронные данные, – режим доступа https://www.technologyreview.com/ – дата доступа: ноябрь 2017.
- ZALA AERO GROUP [Электронный ресурс]: Применение беспилотников (беспилотных летательных аппаратов, БПЛА) – электронные данные, – режим доступа http://zala.aero/primenenie/