Аннотация
Borisov А. аnd othеr. Prinсiple аnd gеnеrаI Struсturе af а sуstеm оf оatorпаtеd соntrоI bу о соmplос mining conveуor liпе нlith intеrmеdiаtе bankеrs. In thе аrtiсlе аrе presеnted a prinсiplе аnd genеrаl struсture of а sуstеm of аutomаtеd сontrol bу а сomplех miпing сonveyor liпе wlth intеrmediate bunkers, providing its сontiпuous, rhуthmiсаl work with loаding сlosе to nominаl аt the ехpеnse of optimum сontrоl af stoсks in bunkеrs аnd shаrp variations goods trаffiсs
Работа добычных участков шахт характеризуется неравномерным поступлением угольного потока из забоев. В этих условиях для сглаживания резких колебаний величины угольного потока в местах погрузки и перегрузки его на магистральные конвейерные линии используют бункерные устройства, оборудованные данными питателями (дозаторами). Однако, при ручном управлении слояшой конвейерной системой с бункерными устройствами, забои в случаях необходимости одновременной разгрузки нескольких бункеров и интенсивном потоке угля вынуждены прерывать работу, а в случае резкого уменьшения потока и отсутствия угля в бункере должны останавливаться подбункерные конвейеры или вся конвейерная линия. При этом из–за отсутствия автоматического контроля и управления системой, несмотря на значительные емкости бункеров, обеспечить надежную, бесперебойную и ритмичную работу конвейерной системы не удается.
На рис.1.а и рис.1.б приведены принцип и общая структура системы автоматизированного утправления, обеспечивающие непрерывную, ритмичную работу сложных конвейерных линий с производительностью (загрузкой) близкой к номинальной.
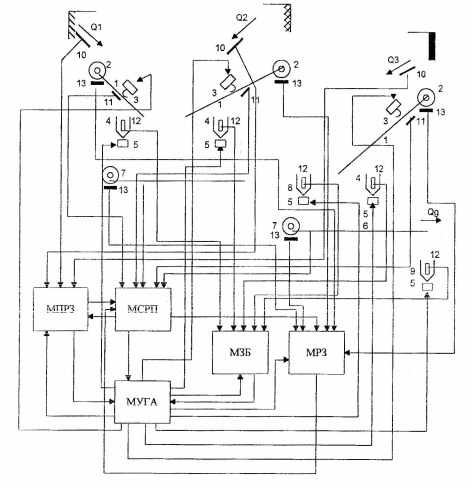
Рисунок 1.а – Структурная схема САУ конвейерной линии
Структура технологической части (рис.1.а) включает: забои Q1-Q3 как источники угольного потока; подающие конвейеры 1 с приводами 2 и с плужковыми сбрасывателями 3, для направления потока либо в бункеры либо мимо их непосредственно на последующие конвейеры; бункерные устройства 4 с подбункерными конвейерными питателями 5 для регулирования потока избункеров; магистральные конвейерные пинии 6 с приводами 7 и промежуточным бункером 8, концевой бункер 9 скипового подъема.
Система автоматизированного контроля и управления содержит: датчики 10 информации о работе забоев (комбайнов); модель МПРЗ прогнозирования работы забоев по предыстории, состоянию или экспертами; датчики 11 веса груза (или только его наличия) на ленте конвейера; модель МСРП статистического и расчетного прогнозирования потоков грузов на входах конвейерных линий; датчики 12 уровня угля в бункерах для оценки имеющихся запасов; модель МЗБ оценки запасов, имеющихся в бункерах на данный момент; датчики 13 мощности загрузки приводных двигателей, пропорциональной грузу, находящемуся на ленте работающего конвейера; модель МРЗ оценки распределенного запаса груза на лентах конвейерных линий; модель МУГА управления грузопотоками и адаптации системы.
Задача оптимизации грузопотоков ставится следующим образом. Рассматривается сложная система конвейерного транспорта, включающая источники потока грузов, транспортные звенья, емкости для приема грузов, перегрузочные устройства для подачи грузов в основное магистральное транспортное звено с заданной пропускной способностью. Потоки грузов от источников стохастические, переменные с прогнозируемым значением на данном интервале. Известно среднее (плановое) суммарное значение потока груза от источников равное пропускной способности транспортной системы. Известны необходимые запасы по пропускной способности подаюших звеньев и магистрального транспортного звена, обеспечивающие перспективное развитие угледобычи.
В виду большой дисперсии, резких колебании грузопотоков, может оказаться, что в момент прекращения грузопотока запас его в емкости будет малым или отсутствовать, что может вызвать остановку конвейерной линии, а при резком увеличении потока и большом запасе угля в емкости возможно переполнение бункера и остановка забоя. Задача заключается в поддержании непрерывного баланса между входными (в том числе и будущими) потоками из забоев, запасами грузов сосредоточенными в бункерах и распределенными конвейерных линиях как источниками будущих потоков, и выходны управляемыми потоками таким образом, чтобы обеспечивалась непрерывная работа конвейерной системы с пропускной способностью близкой номинальной.
На рис.1.б приведен график, иллюстрирующий предложенный прини оптимизации грузопотоков. Здесь приняты следующие обозначения: Δtо , Δtуп - интервалы оптимизации, регулирования и упреждения возмущен (колебаний грузопотоков) по прогнозу, τ - интервал определен: действительного Qд(t) грузопотока (движущегося на ленте конвейера гру который будет перемещаться в течение времени τ от начала к концу конвейер Qn (t) - прогнозный грузопоток на интервале оптимизации Δto , Qyp , Qy, усредненные прогнозные грузопотоки на интервалах регулирования Δтр упреждения Δtyn, Qu - средний грузопоток из-за боев, на который рассчитана пропускная способность конвейерной системы, ΔQ1 - величина превышен средним потоком Qyп на интервале регулирования среднего потока Qо за интервал оптимизации Δto, ΔQ2 - величина недостачи прогнозным потоком интервале упреждения Δtyn среднего потока Qo, которая должна будет передана с интервала Δt2 на интервал Δtуп в виде накопления запаса для обеспечен непрерывной работы конвейера.
Идея оптимизации заключается в комплексном использовании управления запасами в бункерах для обеспечения непрерывности грузопоток потребителю и управления грузопотоком в допустимых пределах так, что запасы находились в пределах емкостей бункеров и сохранялось среднее оптимизируемый интервал значение грузопотока к потребителю. Другой особенностью принципа оптимизации системы является возможность учел использования всей информации о текущем, прошлом и будущем (прогнозні состоянии системы. Для этого весь интервал оптимизации Δtu разбит интервалы регулирования Δtp и упреждения Δtyn.
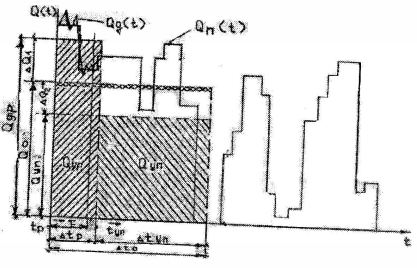
Рисунок 1.б – График оптимизации грузопотоков
Интервал регулирования необходим для перевода инерционного звена бункера и конвейерной линии в нужное состояние за Δtp заранее для накопления или расходования запаса груза. Интервал упреждения Δtyп, необходим для определения направления перевода узла в то или иное состояние (расходования или накопления запасов) по ожидаемому (прогнозному) грузопотоку на этом интервале. Кроме того введен интервал τ определения гарантированного измеряемого грузопотока, который может быть обеспечен на время τ движущимися на конвейерах распределенными, определяемыми по предыстории начиная с момента t-τ и фиксировавшихся датчиками веса груза по ленте конвейера.
Функционирование системы оптимизации (рис.1.а) осуществляется в следующем порядке.
По информаци датчиков 10 о текущем состоянии н данным экспертных (опреративных) оценок будущего состояния забоев, регнетрацни предыстории работы забоев в моделях МПРЗ и МСРП вырабатываются прогнозы усредненных грузопотоков Qyp и Qyп на интервалах Δtp и Δtyn Одновременно в моделях МСРП и МРЗ по показаниям датчиков веса 11 груза на лентахконвейеров и датчиков 13 загрузки приводных двигателей конвейеров 1, 6 определяется величина распределенного запаса груза и будущий усредненный грузопоток Од на интервале τ при разгрузках конвейерных линий. Все потоки Qур, Qyп, Qд прогнозируются и усредняются на своих интервалах Δtp, Δtyn, τ в скользящем режиме. По данным текущих оценок работы забоев (комбайнов) и оценок экспертов МПРЗ, статическому прогнозу по предыстории конвейерной системы (МСРП) и данным о потоке Qд на интервале τ (МРЗ) составляется гибридный прогноз Qур и Qyп для Δtp, Δtyn с учетом «весов» составляющих прогнозов. При этом «веса» ωi для составляющих прогнозов, определенных по различным каналам, являются переменными оптимизации для модели МУГА управления и адаптации прогнозных моделей (МПРЗ, МСРП, МРЗ) по критерию достоверности. Таким образом, в модели МУГА в любой момент времени имеется информация о будущем состоянии конвейерной системы по грузопотокам Qyp и Qyn. Далее по показаниям датчиков уровня 12 в бункерах 4, 8 в модели МЗБ формируются величины запасов грузов, также поступающих в модель МУГА для управления грузопотоками. В модели МУГА по прогнозным грузопотокам Qyp на интервале Δtp (рис.1.6) и Qyp на интервале Δtyn , определяется среднее значение грузопотока, с которым должна работать система весь интервал Δto= Δtp+ Δtуп, Если поток Qyр на интервале Δtp превышает средний опорный Qo (как показано на рис.1.б) на ΔQ1, a меньше опорного на ΔQ1, то во избежании остановки конвейера в интервале Δtyп МУГА определяет запас, который должен быть накоплен за Δtp при большом грузопотоке, так чтобы его хватило для работы конвейера в период Δtyn при малом грузопотоке, и обеспечивалась средняя производительность конвейерной линии, равная среднему грузопотоку Qo за период Δto. После определения в МУГА необходимого запаса в бункерах, который должен быть накоплен на интервале Δtp для обеспечения работы конвейеров на интервале Δtyп, рассчитывается производительность подбункерного (подающего) конвейера с учетом работы его на запасе при малом грузопотоке на прогнозном интервале Δtyп. Расчетные значения уровня в бункере и производительности конвейера передаются блоком МУГА для исполнения на дозаторы 5 бункерных устройств и плужковые сбрасыватели 3. Кроме того, по сигналам рассогласования прогнозных и реальных значений грузопотоков и запасов грузов из блока МУГА на выходы моделей МПРЗ, МСРП, МЗБ и МРЗ подаются корректирующие сигналы для их адаптации.
Таким образом, приведенный принцип и структура оптимизации обеспечивают работу конвейерной системы в непрерывном режиме с спропускной способностью близкой к среднему грузопотоку Qo из забоев, за счет оптимального управления запасами в бункерах и резких колебаний грузопотоков.