Исследования и разработки 3D-моделирования
Автор:Xi-Dao LUAN, Yu-Xiang XIE, Long YING and Ling-Da WU
Источник: Xi-Dao LUAN, Yu-Xiang XIE, Long YING and Ling-Da WU. Research and Development of 3DModeling
Аннотация
3D-моделирование – ключевой метод для многих исследований и приложений. В разных областях исследования и применения, методы 3D-моделирования для сбора данных модели и моделирования имеют свои особенности. Статья систематически знакомит с аппаратом сбора 3D-данных и методами моделирования, обсуждаются характеристики и разработки лазерной системы сканирования и моделирование и визуализация, основанные на изображениях (Image-Based Modeling and Rendering - IBMR) в последние годы. Статья также знакомит с приложениями 3D-моделирования, включая тканевую инженерию и охрану наследия. Наконец, указано несколько основных проблем и несколько недоработок и дальнейшие проблемы, предусмотренные тремя аспектами: моделирование поиска, метод оцифровки и динамическое моделирование.
Ключевые слова
3D-моделирование, IBMR, получение данных, рендеринг
1. Введение
Создание точных моделей для моделирования и представления принципов поведения вещей, является общим и важным методом для современной науки. В приложениях и областях науки существует также растущий интерес и тенденция к моделированию мира в цифровые три измерения. Моделирование и имитация реального мира – это процесс оцифровки формы объектов, движения, текстуры и другие свойства в соответствии с акцентом.
Проделана большая работа и получено выдающееся достижение на цифровом оборудовании и программном обеспечении. Компьютерные инструменты 3D-моделирования, в том числе лазерная сканирующая система и моделирование и визуализация, основанные на изображениях (IBMR) становятся все более мощными. Моделирование объектов эволюционирует от объектов с простой структурой к сложному человеческому лицу, конечностям, волосам и даже жидкости.
В прошлом основным назначением 3D-моделирования были визуальное ознакомление и управление роботом. В настоящее время акцент смещается. 3D-моделирование широко использовалось в областях, включая компьютерную графику, виртуальную реальность и коммуникации, и все больше спроса на 3D контент для тканевой инженерии и охраны наследия. В различных областях исследования и применения, методы 3D-моделирования для сбора данных моделей и моделирования имеют свои особенности.
В этой статье процесс 3D-моделирования, включая сбор 3D-данных, моделирование и рендеринг представлен системно. В статье также обсуждаются характер и развитие системы лазерного сканирования и IBMR в последние годы, представлено применение 3D-моделирования, включая тканевую инженерию и охрану наследия. Наконец, указано несколько основных проблем и несколько недоработок и дальнейшие проблемы, предусмотренные тремя аспектами: моделирование поиска, метод оцифровки и динамическое моделирование.
2. Сбор 3D-данных
Для моделирования объекта необходимо сначала получить данные о размере и глубине объекта. В различных областях исследования и применения, есть разные требования соответственно. Оборудование и методы моделирования, принятые в процессе моделирования также различны. Например, чтобы реконструировать 3D подводную среду, люди должны использовать сонар и спутник океана, чтобы получить данные о подводном рельефе. Чтобы улучшить понимание человека-оператора, управляющего подводным дистанционно управляемым транспортным средством, U. Castellani реконструирует 3D подводную среду акустической камерной системой в режиме реального времени, а разрешение – около 5 см на частоте акустического сигнала 500kHz [1].
В целом, измерительные системы состоят из контактов и бесконтактных методы [5]. Контактные методы варьируются от простого измерения с использованием ленты до сложной координирующей измерительной машины (CMM). Эти два метода обычно используются в машиностроении. Измерение с использованием ленты является обычным и подлежит ошибкам. Его эффективность медленна. Хотя CMM полностью автоматизированная и точность измерения составляет 0,02 мм, CMM требуется стабильная платформа, а размер объекта ограничен.
Технология бесконтактных измерений является результатом развития компьютерной графики и визуализации, акустики, оптики и соответствующего оборудования. Бесконтактные методы включают лазерную сканирующую систему (например, VIVID910 лазерный сканер), систему геодезической общей станции (например, система AXYZ, точность составляет около 0,05 мм), фотограмметрическую систему ближнего действия (например, системы V-STARS, ее точность лучше 0,05 мм) и систему структурированного света (например, Eyetronics' ShapeCam [2], точность которой до 0,5 мм в зависимости от того, насколько плотно пользователь фокусируется на своей сетке) и т. д. [5].
2.1 Лазерная сканирующая система
Системы лазерного сканирования, например, VIVID910, имеют исключительные преимущества: высокая скорость (время сканирования варьируется от 0,3 с (быстрый режим) до 2,5 сек (тонкий режим)), огромные данных (до 77 000 или 300 000 точек для быстрого и точного режима соответственно), высокая точность (0,22 мм, 0,16 мм и 0.10 мм по x, y и z соответственно) и простота. В соответствии с размерами объектов и расстояниями измерений, пользователи также могут выбрать и использовать один из 3 типов сменных установленных объективов.
Чтобы моделировать окружающую среду эффективно и точно, Toshihiro и Masayuki [3] получают дальность и цвет данных путем интеграции всенаправленного лазерного дальномера и всенаправленной многокамерной системы. Чтобы зарегистрировать многодиапазонные данные большой площади стабильно и одновременно с помощью улучшенного алгоритма ICP, плоские поверхности, такие как стены и дороги выделяются и используются в процессе регистрации. Сгенерированная модель поверхности затем текстурируется всенаправленными изображениями, выбранными с учетом разрешения и окклюзии. Измеримый диапазон всенаправленного лазерного дальномера LMS-Z360 варьируется от 1 м до 200 м, а его точность измерения ± 12 мм.
Чтобы получить трехмерную информацию о зданиях точным и быстрым способом, Yusuf Arayici применил 3D лазерный сканер технологии для моделирования САПР [4]. В этом финансируемом ЕС проекте INTELCITIES, САПР-моделирование интегрировано с различными системами, такими как 3D-печать и VR проекционные системы для хранения данных существующих зданий, e-Planning and e-Inclusion, e-Regeneration, Virtual Urban Planning и т.д. (www.intelcitiesproject.com)
Хотя система этого типа может получать 3D-данные поверхности объектов как облака точек точным, быстрым, автоматическим способом, соответствующее оборудование дорогое и ограничено условиями; некоторые системы плохо работают на солнце или в дождь. Хотя этап сбора может принести пользу автоматическим процедурам, 3D-облака точек нуждаются в пост-обработке полезных выходных данных. Для аналитического представления архитектурного объекта особенно требуется много ручных действий.
2.2 Фотограмметрическая система ближнего радиуса действия
Фотограмметрические системы ближнего радиуса действия, такие как V-STARS система, относительно дешевые. Результаты исследований [5] указывают ее практичность с точки зрения скорости, надежности, гибкости и точности. В медицинской области, 3D-данные органов и тканей обычно происходят из компьютерной томографии (КТ), магнитной резонансной визуализации (МРТ), оптической микроскопии, микро-КТ и т. д. У каждого свои преимущества и ограничения. Последнее развитие технологии микро-КТ успешно было использовано для моделирования легочной ткани при разрешении 10-50 микрон [6].
IBMR легче сопоставить подходящую текстуру на поверхности модели. Но эффект этого метода в основном зависит от алгоритмического дизайна моделирования. Эти алгоритмы, такие как моделирование на основе тени или силуэтов, являются в основном сложными и нуждающимися в большем количестве вычислительных ресурсов. Кроме того, этот тип алгоритма вряд ли может точно смоделировать объект с вогнутой частью поверхности. Это распространенная проблема базируемых на перспективе алгоритмов.
В последние годы для получения 3D-информации в лаборатории, некоторые исследователи принимают общее оборудование включая поворотную платформу и цифровую камеру [8, 9, 10]. Компоненты не являются сложными и их легко найти, установить и использовать. В этих системах все камеры фиксированы. Поворачивая платформу, получаем многоракурсную серию фотографий реального объекта. Чтобы зарегистрировать и объединить изображения в единую координатную систему автоматически, Soon-Yong Park и др. внедрили и откалибровали систему координат поворотной платформы с помощью относительной системы координат камеры [8]. Ulas Y?lmaz и др. предлагают алгоритм калибровки камеры на основе визуализации и используют этот алгоритм при извлечении оси вращения [9]. Miguel Sainz и др. [10] и [8] добавляют искусственные фидуциальные шаблоны на сцену, чтобы помочь обнаружить функции и откалибровать стереокамеру. Конфигурация оборудования простая и недорогая. Сложность методов также уменьшилась. Но конструкция этих систем ограничивает их применение, особенно для широкополосной среды и объектов, которые не могут быть перемещены.
Прежде чем строить модели, калибровка камеры для получения внутреннего и внешнего параметра камеры важна и необходима. Для систем, использующих стационарные камеры, калибровка проще, но некоторые части объекта с ключевыми символами геометрии не могут быть выбраны и получены. Реконструированная модель будет иметь неизбежный дефицит структуры и текстуры. По сравнению с системой фиксированной камеры, системы, использующие ручные камеры, могут получать 3D-данные объекта со всех сторон, но это затрудняет калибровку камеры и сопоставление изображений.
Чтобы получить параметр ручной камеры, Liu Gang [11] соответственно выбрал некоторые характерные точки диапазона изображений человеко-компьютерного взаимодействия. Этот тип системы также может вводить некоторые шаблоны в сцене или на фоне для калибровки, в то время как объект, который должен быть смоделирован, может частично перекрывать шаблон. Anselmo Antunes Montenegro и другие. [12] применяют метод калибровки на основе распознавания модели, который является адаптивным алгоритмом пространственной резки, использующим фотометрическую и сегментную информацию.
3. 3D-моделирование и рендеринг
Графическое моделирование и рендеринг (GBMR) – это традиционный метод. Программное обеспечение для 3D-моделирования, такое как AutoCAD и Maya, могут помочь в моделировании путем взаимодействия. Но это требует много времени и требует много навыков для пользователей, особенно для моделирования сцен со сложными и нерегулярными структурами.
3.1 Моделирование и рендеринг на основе изображений
Хотя традиционно компьютерная графика фокусируется на преобразование 3D-данных в 2D-изображения, изображения играют более важную роль в IBMR. Эта область сравнительно молодая; ее конфигурация проста и в основном использует общее оборудование; она может моделировать объекты различных размеров; также может получить информацию о глубине и текстуре одновременно. IBMR по-прежнему сосредоточено в области 3D-моделирования.
Carlos Hernandez Esteban [13] классифицирует методы IBMR в соответствии с информацией, которую они используют. Первый класс – это методы формирования из силуэта. Эти методы получают начальную оценку 3D-модели, известной как визуальный корпус. Они надежные и быстрые, но из-за типа информации, используемой этими методами, они ограничены простыми объектами. Второй класс включает методы формирования из затенения. Эти методы основаны на диффузионных свойствах Ламбертовских поверхностей и очень зависят от условий освещения. Третий класс – это методы, которые используют информацию о цвете сцены. Там существует различные способы использования цвета в зависимости от типа сцены, подлежащей восстановлению. Один из способов – вырезать объем вокселя по насыщенности цвета, в то время как результатом является модель, состоящая из набора вокселей, которую трудно представить трехмерной сетчатой моделью. Другой способ – направлять деформируемую модель по насыщенности цвета, чувствительной к условиям освещения для сравнения абсолютных значений цвета этими методами. Другой способ заключается в том, чтобы сравнить местные вариации текстуры, такие как кросс-корреляции методов, описанных в [14]. Некоторые методы использования информации цвета используют некоторый другой тип информации в то же время, таких как текстура и силуэт, описанных в [13]. Хотя эти методы могут обеспечить лучшую модель, качество по-прежнему ограничено для способа слияния различных данных.
3.2 Исследования и разработка IBMR
После получения ряда изображений первый шаг – калибровка камеры путем извлечения функции и сопоставления. Как правило, на этом шаге выбирается и сопоставляется не менее 7 пар соответствующих точек между двумя изображениями, вычисляется фундаментальная матрица по полярной геометрии и наконец получаем матрицу проекции.
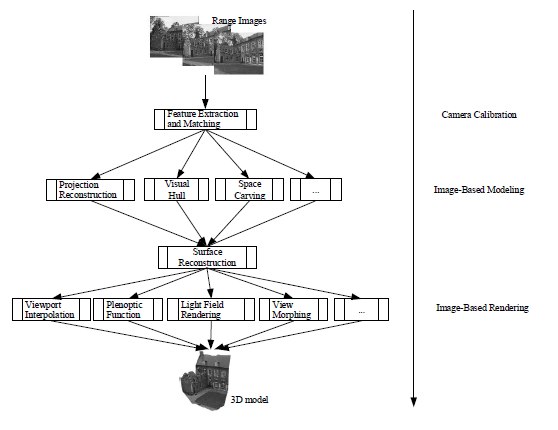
Рисунок 1 – Моделирование и визуализация, основанные на изображениях (IBMR)
Следующий этап моделирования включает различные методы (рис. 1), такие как реконструкция проекции, визуальный корпус, пространственная резьба. [15] предлагает алгебраический метод двойного пространства, который не требует соответствия. Метод оценивает информации о глубине по контурам из информации кривизны и создает визуальный корпус объекта. Этот метод также требует, чтобы поверхности отбирались более плотно, где кривизна быстро меняется.
Обычно поверхность строится полигональной сеткой. В то время как во многих системах сбора трехмерной информации 3D-данные получают данные о точках или облака точек. Поскольку облака точек явно не имеют топологической связи, они оказались более удобными для упрощения последней обработки и представления. Они больше подходят для применения, которое не требует непрерывной поверхности или выполняет зависящую от просмотра многорежимную повторную выборку.
IBMR может сопоставить текстуру на поверхности объекта, чтобы легко синтезировать реалистичную модель [10, 11, 16]. В течение процесса визуализации на основе изображений (IBR), операции не требуют много вычислительных ресурсов; время рендеринга независимо от сложности сцены, и метод может синтезировать реалистичные сцены и анимацию в реальном времени. Большинство методов IBMR не зависят от масштаба, поэтому он может получить трехмерную модель всего участка или объекта. IBR в основном включают методы интерполяции области просмотра, пленоптическую функцию, отображение морфинга, рендеринг светового поля, концентрические мозаики.
При моделировании окружающей среды и зданий, [3] и [17] интегрируют лазерное сканирование и IBMR, это два различных метода, которые могут не только получить облака точек автоматическим, быстрым и точным способом, но также представить модели в деталях, что является преимуществом IBMR в отображении текстур. Таким образом, эти два метода являются взаимодополняющими в определенном смысле.
4. Применение 3D-моделирования
В настоящее время 3D-модели используются в широком спектре захватывающих областях применения: анимация, археология, архитектура, стоматология, образование, мода и текстиль, обувь, судебная экспертиза, игры, промышленный дизайн, производство, медицина, фильмы, мультимедиа, музеи, быстрое макетирование, обратное проектирование, скульптура, игрушки, изготовление пресс-форм и веб-дизайн. 3D-моделирование стало ключевой технологией во многих областях применения.
Исследование 3D-моделирования способствует развитию охраны наследия. Существуют некоторые проекты в области охраны наследия, использующие лазерное сканирование, например, Digital Michelangelo Project [18, 19], Stanford Digital Formae Urbis Romae Project [20]. [21] использует ShapeCam, структурированную световую систему, чтобы построить подробную трехмерную модель Antonineny mphaeum в древнем городе Сагалассос (SW-Турция). Pagpagiannakis и другие построил внутренние и внешние модели церкви SS. Sergius and Bachhus, Турция, Стамбул с помощью 3D Studio Max.
Компьютеризированная тканевая инженерия (CATE) – это новое направление биомедицины. В этой области 3D-моделирование широко используется для моделирования тканей и органов, руководства по проектированию искусственных органов и тканей, таких как кости и сосуды и осуществления тканевой инженерии [22, 23, 24].
5. Заключение и обсуждение
В настоящее время все больше и больше областей нуждаются и внедряют технологии 3D-моделирования. Существует ряд направлений, в которых нам нужно продолжить. Прежде всего, это получение трехмерной модели. Для измерения сходства моделей используются характеристики 3D-моделей, такие как форма, топологическая конструкция и текстура. Эти характеристики трудно описать для пользователей и сложно вычислить, в то время как эффективная функция получения необходима для интегрированного 3D-моделирования.
В настоящее время качество изображения становится одним из главных пунктов внимания. Все больше и больше спрос на 3D-контент с более высокой точностью. Информация о сцене и объекте не может быть собрана абсолютно во время сбора 3D-данных, и некоторые данные неизбежно теряются, мы не можем восстановить реальное слово из видео или изображения по текущей конструкции. Таким образом, нам необходимо изучить новые методы оцифровки реального мира.
Динамическая модель – наше новое направление будущей работы. Динамические модели могут имитировать ответные действия объектов, что также очень полезно в изучении дисциплины эволюции вещи.
Список использованной литературы
1. U. Castellani, A. Fusiello, V. Murino, L. Papaleo, E. Puppo, M. Pittore. A complete system for on-line 3D modelling from acoustic images. Signal Processing: Image Communication, 2005, 20: 832–852.
2. Eyetronics, 2004, URL: http://www.eyetronics.com.
3. Toshihiro ASAI, Masayuki KANBARA, Naokazu YOKOYA. 3D Modeling of Outdoor Environments by Integrating Omnidirectional Range and Color Images. Proceedings of the Fifth International Conference on 3-D Digital Imaging and Modeling (3DIM’05).
4. Yusuf Arayici, Andy Hamilton. Modeling 3D Scanned Data to Visualize the Built Environment. Proceedings of the Ninth International Conference on Information Visualisation, 2005, 509–514.
5. Halim SETAN, Mohd Sharuddin IBRAHIM. Close Range Measurement and 3D Modeling. Presented at the 1st International Symposium on Engineering Surveys for Construction Works and Structural Engineering, 2004.
6. Kriete A., Breithecker A., Rau W. 3D imaging of lung tissue by confocal microscopy and micro-CT. Proceedings of SPIE – The International Society for Optical Engineering, 2001, 469–476.
7. Dhenain M, Ruffins SW, Jacobs RE. Three-dimensional digital mouse atlas using high resolution MRI. Developmental Biology, 2001, 232(2): 458–470.
8. Soon-Yong Park, Murali Subbarao. A multiview 3D modeling system based on stereo vision techniques. Machine Vision and Applications, 2005, 16: 148–156.
9. Ulas Y?lmaz, Adem Mulayim, Volkan Atalay. Reconstruction of Three Dimensional Models from Real Images. Proceedings of the First International Symposium on 3D Data Processing Visualization and Transmission (3DPVT.02), 2002.
10. Miguel Sainz, Renato Pajarola, Albert Mercade. A Simple Approach for Point-Based Object Capturing and Rendering. IEEE Computer Graphics and Applications, 2004, July/August: 24–33.
11. Liu Gang, Wang Zhangye, Peng Quensheng. Generating Visual Hulls From Freely Moving Camera. Journal of Computer-Aided Design & Computer Graphics, 2004,16(11),1501–1505 (in Chinese).
12. Anselmo Antunes Montenegro, Paulo C. P. Carvalho, Luiz Velho, Marcelo Gattass. Space carving with a hand-held camera. Proceedings of the XVII Brazilian Symposium on Computer Graphics and Image Processing (SIBGRAPI’04), 2004, 396–403.
13. Carlos Hernandez Esteban, Francis Schmitt. Silhouette and stereo fusion for 3D object modeling. Computer Vision and Image Understanding, 2004, 96: 367–392.
14. A. Sarti, S. Tubaro. Image based multiresolution implicit object modeling. EURASIP J. Appl. Signal Process, 2002, 10: 1053–1066.
15. Matthew Brand, Kongbin Kang, David B. Cooper. Algebraic solution for the visual hull. Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2004, I33–I35.
16. Yoo-Kil Yang, Jung Lee, Soo-Kyun Kim, Chang-Hun Kim. Adaptive Space Carving with Texture Mapping. LNCS 3482, 2005, 1129–1138.
17. Livio De Luca, Philippe Veron, Michel Florenzano. Reverse engineering of architectural buildings based on a hybrid modeling approach. Computers & Graphics, 2006, 30: 160–176.
18. Digital Michelangelo project, URL: http://graphics.stanford.edu/data/mich/.
19. M. Levoy, K. Pulli, B. Curless, S. Rusinkiewicz, D. Koller, L. Pereira, M. Ginzton, S. Anderson, J. Davis, J. Ginsberg, J. Shade, D. Fulk. The digital Michelangelo Project: 3D scanning of large statues. In Siggraph 2000, 2000, 131–144.
20. Stanford digital Formae Urbis Romae project, URL: http://formaurbis.stanford.edu/index.html.
21. P. Mueller, T. Vereenooghe, M. Vergauwen, L. Van Gool, M. Waelkens. Photo-realistic and detailed 3D modeling: the Antonine nymphaeum at Sagalassos (Turkey). Computer Applications and Quantitative Methods in Archaeology (CAA): Beyond the artifact – Digital interpretation of the past. [http://www.vision.ee.ethz.ch/~pmueller/documents/caa04_pmueller.pdf accessed Mar. 2005].
22. Qin Lian, Di-Chen Li, Yi-Ping Tang, Yong-Rui Zhang. Computer modeling approach for a novel internal architecture of artificial bone. CAD Computer Aided Design, 2006, 38(5): 507–514.
23. W. Sun, B. Starly, J. Nam, A. Darling. Bio-CAD modeling and its applications in computer-aided tissue engineering. Computer-Aided Design, 2005, 37: 1097–1114.
24. Wei Sun, Pallavi Lal. Recent development on computer aided tissue engineering— a review. Computer Methods and Programs in Biomedicine, 2002, 67: 85–103.