Рисунок 1 – Функциональная схема ПЧ с АИН с ШИМ
Автор:М. Ф. Коротков, А. Н. Пахомов, А. А. Федоренко
Источник: Научная электронная библиотека Киберленинка
Актуальность работы обусловлена необходимостью создания быстродействующих замкнутых систем асинхронного электропривода, находящих все большее применение в промышленности.
Цель работы: построение замкнутой системы преобразователь частоты с широтно-импульсной модуляцией выходного напряжения – асинхронный двигатель с модальным управлением.
Методы исследования: теоретические исследования выполнены с привлечением современной теории электропривода и методов теории автоматического управления. Теоретические исследования подтверждены модельным экспериментом.
Результаты: Описан способ формирования линейных уравнений состояния асинхронного двигателя с компенсацией перекрестных обратных связей по току с помощью технических средств и заданием определенного алгоритма функционирования замкнутой системы, обеспечивающего возможность расчета коэффициентов модального регулятора. Разработана модель асинхронного электропривода, учитывающая дискретные свойства преобразователя частоты с широтно-импульсной модуляцией выходного напряжения. Исследованы динамические режимы работы замкнутой системы преобразователь частоты – асинхронный двигатель с модальным управлением в среде имитационного моделирования Simulink пакета MatLab.
Выводы: рассмотренная в работе методика построения системы асинхронного электропривода с модальным управлением позволяет существенно увеличить его быстродействие в динамических режимах работы.
Ключевые слова: модальный регулятор, асинхронный электропривод, векторная система, широтно-импульсная модуляция, математическая модель.
В настоящее время системы управления асинхронным электроприводом (АЭП) с преобразователем частоты (ПЧ) с автономным инвертором напряжения (АИН) строятся на принципах подчиненного регулирования, что не позволяет достичь предельного быстродействия [1]. Вопросы синтеза модальных регуляторов, как правило, рассматриваются на базе электроприводов постоянного тока [4], не смотря на сложившуюся тенденцию перехода на АЭП. Снабдив АЭП модальным регулятором, построенным на основе суммирования обратных связей по вектору состояния, можно обеспечить быстродействие в динамических режимах работы, близкое к предельному. Целью работы является определение структуры и параметров модальных регуляторов частотно управляемого АЭП и проверки эффективности принятых при этом решений методами имитационного моделирования в среде MatLab.
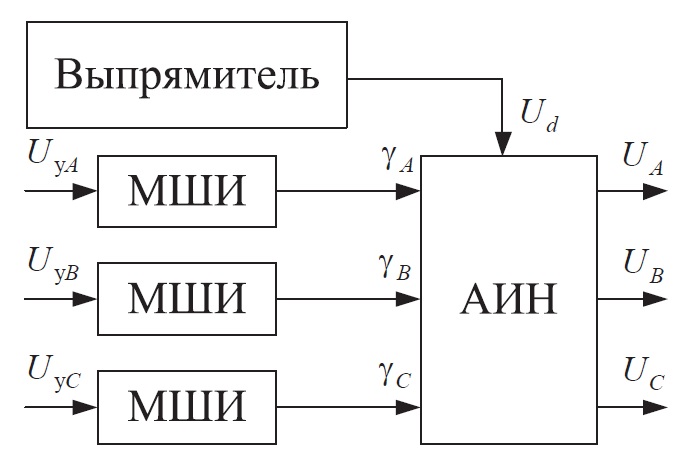
На рис. 1 приведена функциональная схема ПЧ с АИН с широтно-импульсной модуляцией (ШИМ).
Рисунок 1 – Функциональная схема ПЧ с АИН с ШИМ
Модулятор широтно-импульсный (МШИ) i-й фазы (i{A,В,С}) ПЧ по сигналу управления Uyi формирует скважность включения вентилей γi АИН с целью формирования из постоянного напряжения выпрямителя Ud трехфазного напряжения Ui требуемой частоты и амплитуды, подаваемого на статорную обмотку асинхронного двигателя (АД).
Функциональная схема МШИ приведена на рис. 2.
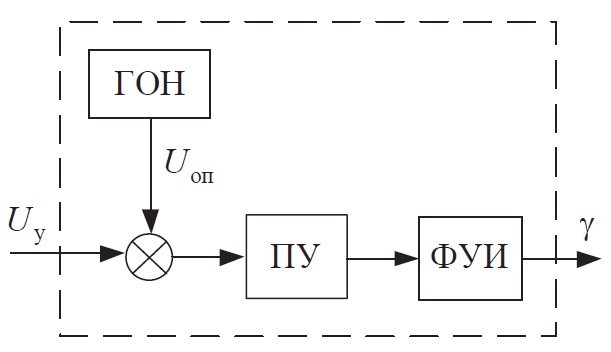
Рисунок 2 – Функциональная схема МШИ ПЧ
Модулятор широтно-импульсный включает в себя [16]:
Поскольку в ПЧ с АИН с ШИМ автономный инвертор формирует не только частоту, но и амплитуду выходного напряжения, влияние звена постоянного тока на динамические свойства системы при синтезе можно не учитывать. Допущения, принятые при математическом описании АИН как элемента системы автоматического управления:
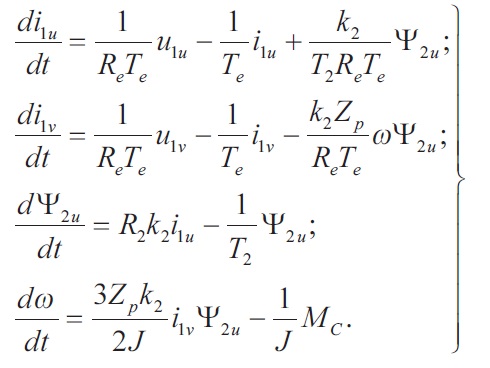
Математическая модель АД в форме Коши в декартовой системе координат u-v, вращающейся с произвольной скоростью ωk, имеет вид [17]:
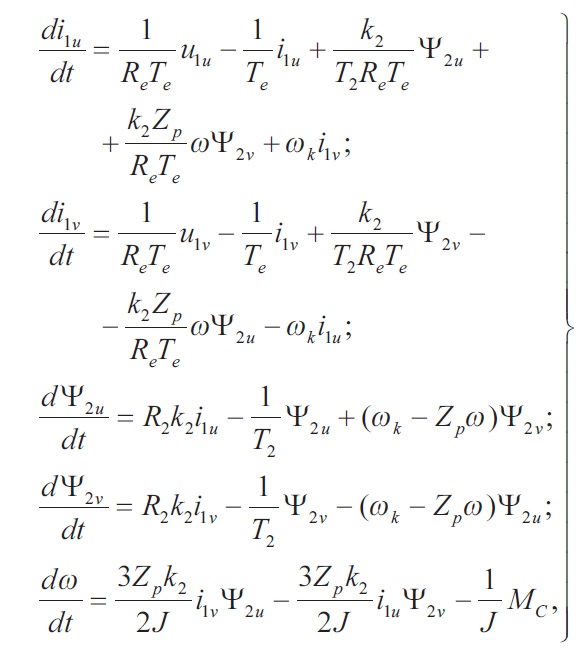
где u1u, u1v, i1u, i1v, Ψ2u, Ψ2v – проекции на оси u и ? декартовой системы координат результирующих векторов напряжения статора u1, тока статора i1, потокосцепления ротора Ψ2 соответственно; ω – угловая скорость вращения ротора; ωk – скорость вращения системы координат u-v; Mc – момент статического сопротивления на валу двигателя; Zp – число пар полюсов; J – момент инерции механической части привода; Te и Re – эквивалентные электромагнитная постоянная времени и активное сопротивление цепи статора АД; R2 и T2 – активное сопротивление и электромагнитная постоянная времени цепи ротора АД; k2 – коэффициент электромагнитной связи ротора АД. Выражения для расчета параметров двигателя можно найти в [17].
Уравнения справедливы при следующих допущениях [17]:
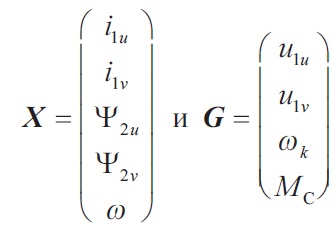
Уравнения динамики АД носят выраженный нелинейный характер и в векторно-матричной форме имеют вид:
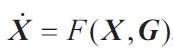
где X и G – векторы переменных состояния и входных воздействий:
Процедура синтеза модального регулятора предполагает линейность объекта управления. Линеаризация уравнений динамики методом малых приращений путем разложения в ряд Тэйлора дает достаточно громоздкую структуру линеаризованных уравнений, которые справедливы только в окрестностях отклонений переменных состояния относительно центра разложения [19].
Поэтому в работе выполнена компенсация внутренних перекрестных связей по току внешними звеньями [20]. В результате в системе координат x-y, ориентированной по вектору потокосцепления ротора (Ψ2=Ψ2x, Ψ2y=0), математическая модель АД примет вид:
Заметим, что скорость вращения координат x-y равна скорости вращения вектора потокосцепления ротора ωk=ω0, которая определяется значениями переменных состояния асинхронной машины на основании четвертого уравнения системы и становится внутренней координатой.
Нелинейные компоненты второго и четвертого уравнений с помощью технических средств нейтрализовать не удается. Однако это можно сделать, обеспечив определенный алгоритм функционирования системы. Если обеспечить постоянство потокосцепления ротора в процессе регулирования скорости, то второе и четвертое уравнение становятся линейными [20].
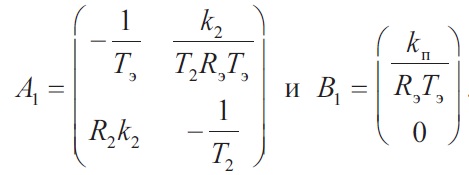
Синтез модальных регуляторов осуществляется для двух линейных подсистем – подсистемы стабилизации Ψ2 и подсистемы управления ω. Матрицы динамики и входа уравнений состояния для первой подсистемы определяются первым и третьим уравнениями системы, в которых переменными состояния являются Ψ2 и формирующий его ток i1x:
В уравнениях второй подсистемы (второе и четвертое уравнения системы) переменными состояния являются ток i1y и скорость вращения ротора ω, при этом предполагается постоянство потокосцепления Ψ2, которое поддерживается подсистемой стабилизации Ψ2 на номинальном уровне. В результате получаются линейные уравнения состояния со следующими матрицами входа и выхода:
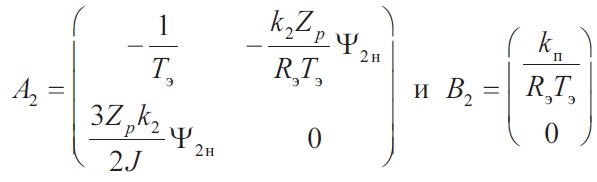
В матрицах входа учтен коэффициент передачи ПЧ АИН с ШИМ kп, который определяется отношением амплитуд основной гармоники выходных напряжений АИН и выходных сигналов преобразователя координат прямого тракта. Статический момент при синтезе регулятора принимается равным Mc=0, но учитывается при моделировании системы.
Коэффициенты модальных регуляторов K11 и K12 подсистемы стабилизации Ψ2 и KΨ21 и KΨ22 подсистемы управления ω рассчитаны по методике, приведенной в [20]. Замкнутая подсистема Ψ2 на страивается на модульный оптимум, а подсистема регулирования скорости вращения ротора АД – на биномиальную настройку [20]. Некомпенсируемая постоянная времени, определяемая инерционностью и временем чистого запаздывания МШИ, на личием фильтров в каналах регулирования и дискретностью АИН принята равной Tμ=3,5 мс [21].
На рис. 3 приведена функциональная схема, полученная в результате синтеза замкнутой системы частотно-управляемого асинхронного электропривода.
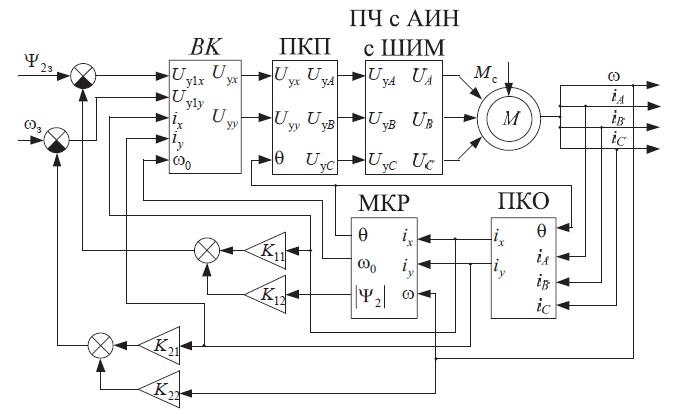
Рисунок 3 – Функциональная схема замкнутой системы асинхронного электропривода
На функциональной схеме приняты следующие обозначения: M – модель трехфазного АД (в работе принят двигатель серии RA100L4 с номинальными данными Pн=3кВт, nн=1420 об/мин); BK – блок компенсаций перекрестных связей по току статора (рассмотрен в [20]); Ψ23 и ω3 – заданные значения потокосцепления и скорости ротора АД; Kij – коэффициенты обратных связей модального регулятора; ПКП, ПКО – преобразователи координат прямого и обратного каналов [17]; МКР – модель электромагнитного контура ротора АД.
Рассмотренная система векторного управления трехфазным асинхронным двигателем содержит модель косвенного определения модуля и скорости вращения вектора потокосцепления ротора. Структурная схема МКР показана на рис. 4. В основе этой структуры лежат уравнения роторной цепи АД, записанные в системе координат, ориентированной по вектору потокосцепления ротора [22]:
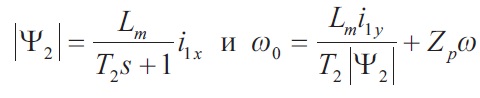
где s – оператор Лапласа; Lm – амплитудное значение взаимной индуктивности обмоток статора и ротора; |Ψ2| – модуль вектора потокосцепления ротора; θ – угловое положение вектора потокосцепления ротора относительно неподвижной в пространстве системы координат.
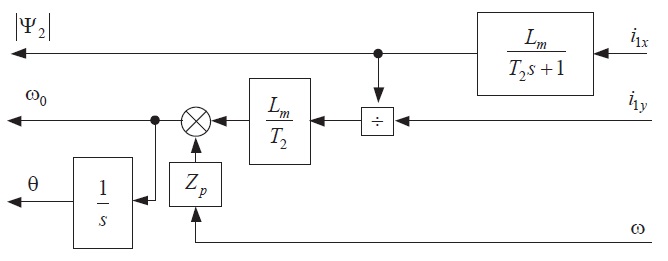
Рисунок 4 – Структурная схема МКР
С целью сравнительной оценки эффективности введения модальных регуляторов, правомерности принятых при расчете их параметров подходов и влияния дискретных свойств ПЧ с ШИМ на процессы в системах векторного частотного управления асинхронным электроприводом, снабженным модальным регулятором, разработана и реализована в пакете MatLab соответствующая функциональной схеме рис. 3 имитационная модель.
Исследования, выполненные с помощью этой модели, частично представлены на рис. 5, 6.
На рис. 5 приведены графики выходных фазных напряжений автономного инвертора с ШИМ, наложенные на соответствующие графики фазных сигналов управления, поступающих на входы МШИ.
На рис. 6 представлены графики изменения выходных координат электропривода: модуля вектора потокосцепления ротора |Ψ2|, скорости вращения ротора ω и электромагнитного момента M.
Графики иллюстрируют три этапа (режима) работы системы автоматического управления:
Как следует из графиков, качество динамических режимов в рассматриваемой системе достаточно близко к теоретически ожидаемому. При выбранном значении некомпенсируемой постоянной времени Tμ=3.5 мс время переходного процесса подсистемы стабилизации |Ψ2| равно tппΨ2=15.2 мс, а подсистемы регулирования ωtппω=16.7 мс. Теоретические знания при том же значении Tμ при настройке на модульный оптимум tппΨ2=4.14Tμ=14.49 мс, а при биномиальной настройке tппω=4.74Tμ=16.59 мс. В системе с подчиненным регулированием переменных при тех же исходных данных быстродействие ниже, как минимум в два раза [21].
Существенные пульсации (дискретность) напряжений формируемых АИН, не смотря на высокое быстродействие, обеспечиваемое модальным регулятором, не приводят к сбоям в работе системы. Управляющие сигналы МШИ остаются гладкими и практически отсутствуют пульсации и в выходных переменных электропривода.
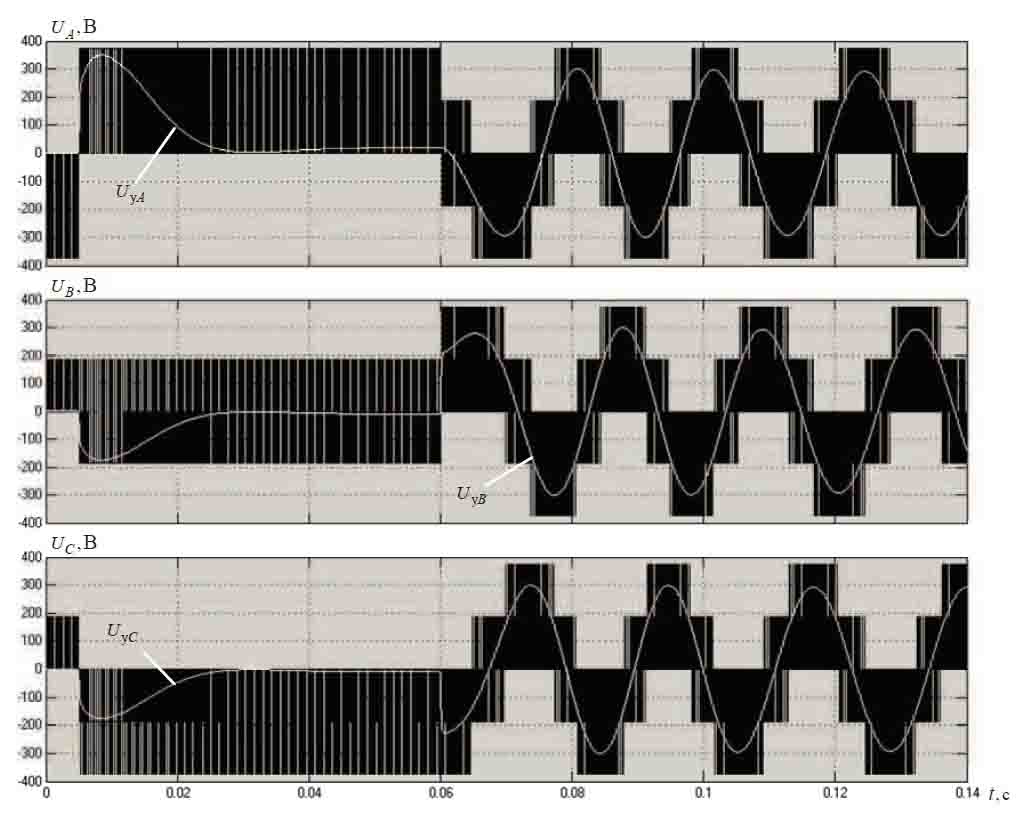
Рисунок 5 – Графики выходных напряжений ПЧ с ШИМ и сигналов управления
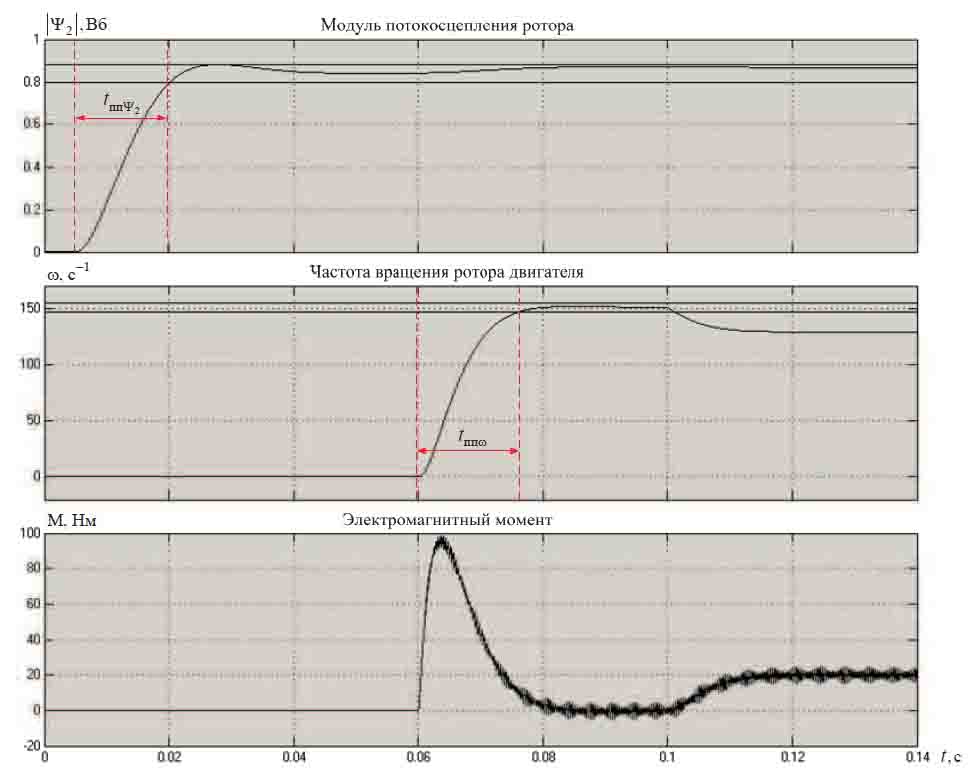
Рисунок 6 – Графики переходных процессов замкнутой системы ПЧ–АД