
Рисунок 1 – Серводвигатель UnimotorFM и рабочий орган
Автор: Е. В. Тумаева, Р. Р. Давлетов
Источник: Научная электронная библиотека Киберленинка
Ключевые слова: позиционный электропривод, точность останова, трехконтурная система автоматического управления, регулятор положения, исследование переходных процессов. Это особенно верно в отраслях, которые использую дорогостоящие материалы для печати.
Решается задача заданного перемещения рабочего органа с требуемой точностью останова средствами сервопривода. Предлагается трехконтурная система автоматического управления, построенная по принципу подчиненного регулирования координат. Определяются типы регуляторов тока, скорости и положения. Показывается влияние коэффициента усиления регулятора положения на показатели переходного процесса.
Позиционный электропривод перемещает рабочий орган из начальной позиции в конечную позицию с требуемой точностью остановки в ней. Пози- ционный сервопривод нашел широкое применение в механизмах точного останова, сборочных роботах, манипуляторах, конвейерах и пр. В шинном производстве «Нижнекамскшина» сервоприводы задействованы в отрезных станках протекторных линий. Точный останов привода в этих станках влияет на расход и качество протекторных заготовок.
Коллектив кафедры ЭТЭОП НХТИ уделяет большое внимание обучению студентов работе с современными электроприводами, использующимися в действующем производстве. В связи с этим разработана и внедрена в учебный процесс лабораторно-промышленная установка, представляющая собой электропривод позиционного механизма с возвратно-поступательным движением.
Рисунок 1 – Серводвигатель UnimotorFM и рабочий орган
Созданный макет может имитировать электроприводы таких производственных механизмов, как отрезное устройство в составе поточных линий, различные устройства подачи и т.п.
Назначение лабораторно-промышленного стенда – изучение устройства сервопривода, механизма позиционирования, оптимальная настройка регуляторов для высокой точности позиционирования, снятие тахограммы электропривода и переходных процессов.


В состав установки входит преобразователь фирмы ControlTechniques и серводвигатель UnimotorFM075 фирмы Sew-Eurodrive [1]. Макет электропривода перемещающимся механизмом, серводвигателем и бесконтактными путевыми выключателями показан на рис. 1.
Основным требованием к позиционному электроприводу является отсутствие статической ошибки позиционирования и перерегулирования.
Система управления сервоприводом представляет собой трехконтурную структуру с контурами тока, скорости и положения [2]. Точность позиционирования определяется контуром положения. Задачей контура тока является обеспечение постоянства токов инвертора и, следовательно, постоянство момента двигателя в заданном диапазоне скоростей и в пределах допустимого значения тока. Контур скорости обеспечивает необходимую жесткость механической характеристики и требуемые динамические показатели электропривода.
Предлагается систему управления строить по принципу подчиненного регулирования с использованием настроек на технический и симметричный оптимум.
Примем за малую некомпенсируемую постоянную времени электропривода постоянную времени преобразователя частоты:
В результате синтеза определяется передаточная функция регулятора тока, которая соответствует пропорционально-интегральному звену:
где TЭ – электромагнитная постоянная времени электропривода; kП – коэффициент передачи преобразователя частоты; RЭ – эквивалентное активное сопротивление цепи статора двигателя; kОТ – коэффициент обратной связи по току.
Регулятор скорости при настройке на симметричный оптимум получается пропорционально-интегральным:
где J – суммарный приведенный момент инерции электропривода; TμС – малая некомпенсируемая постоянная времени контура скорости; kОС – коэффициент обратной связи по скорости двигателя; CМ – коэффициент пропорциональности между моментом и током двигателя.
Для обеспечения малого перерегулирования вводим на вход контура скорости фильтр с передаточной функцией:
В контуре положения при настройке на технический оптимум регулятор получается пропорциональным кп.опт передаточной функцией вида [3]:
где TμП – малая некомпенсируемая постоянная времени контура положения; kОП – коэффициент обратной связи по положению.
Для проверки работоспособности предложенной методики определения параметров регуляторов, проводим моделирование структурной схемы системы автоматического управления сервопривода с полученными регуляторами с помощью пакета Matlab 7.1.
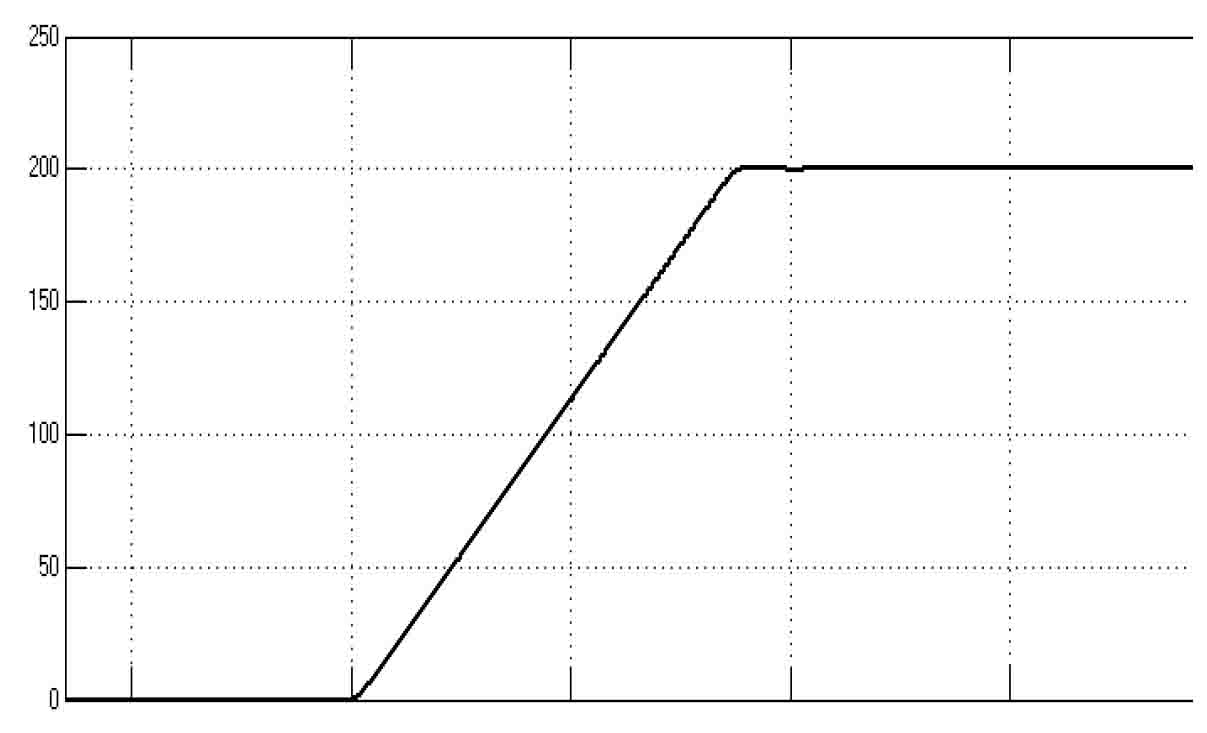
Рисунок 2 – Переходный процесс по положению при Кп.опт
Переходный процесс в контуре положения представлен на рис. 2.
В результате экспериментального исследования лабораторного сервопривода получаем переходные характеристики отработки заданного перемещения при различных коэффициентах регулятора положения. Графики приведены на рис.3–5.
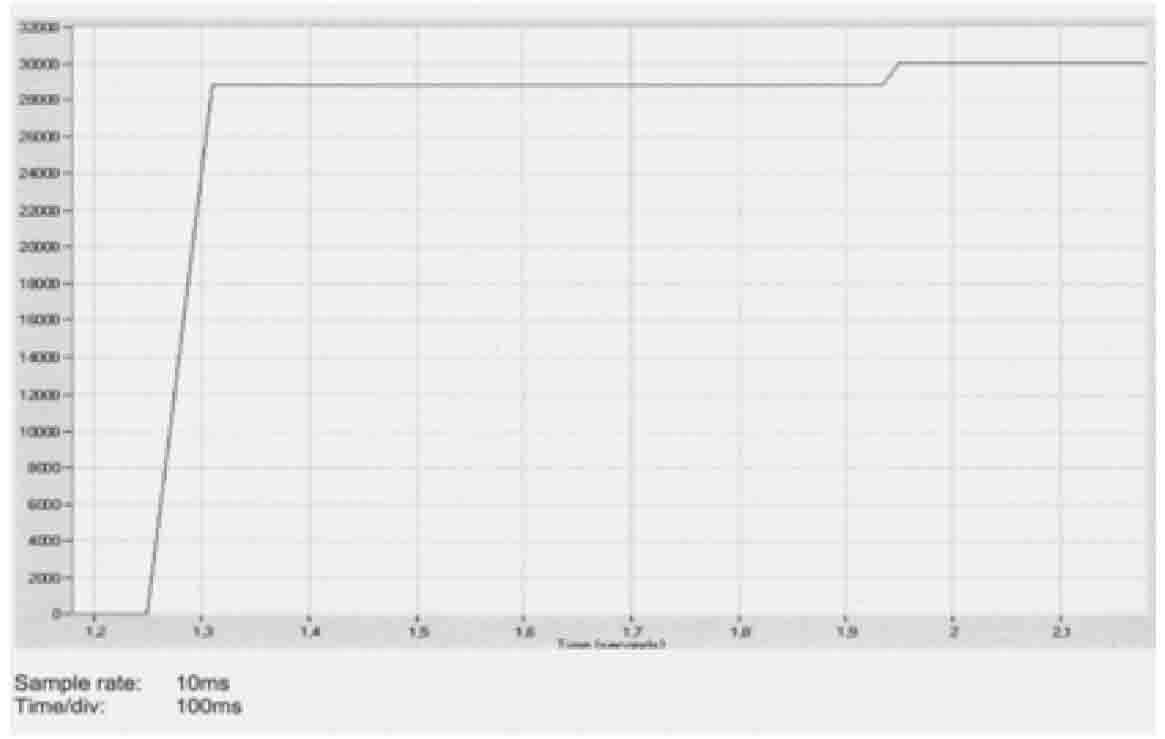
Рисунок 3 – График переходного процесса по позиции при Кп<Кп.опт
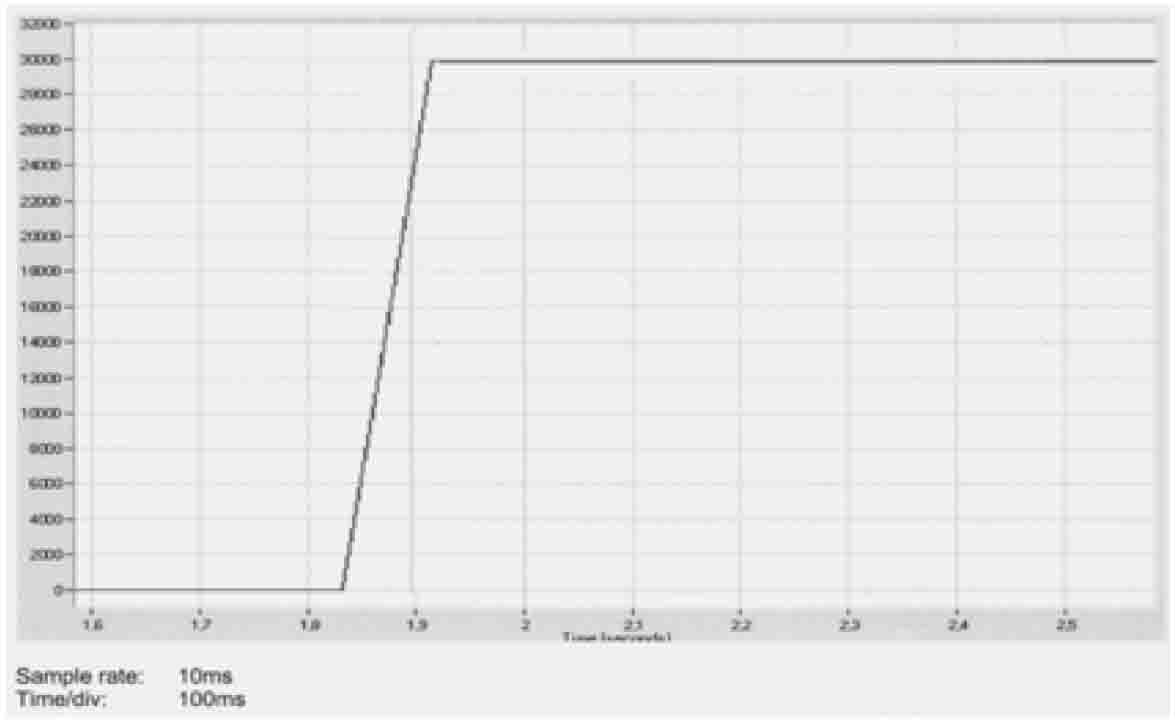
Рисунок 4 – График переходного процесса по позиции при Кп=Кп.опт
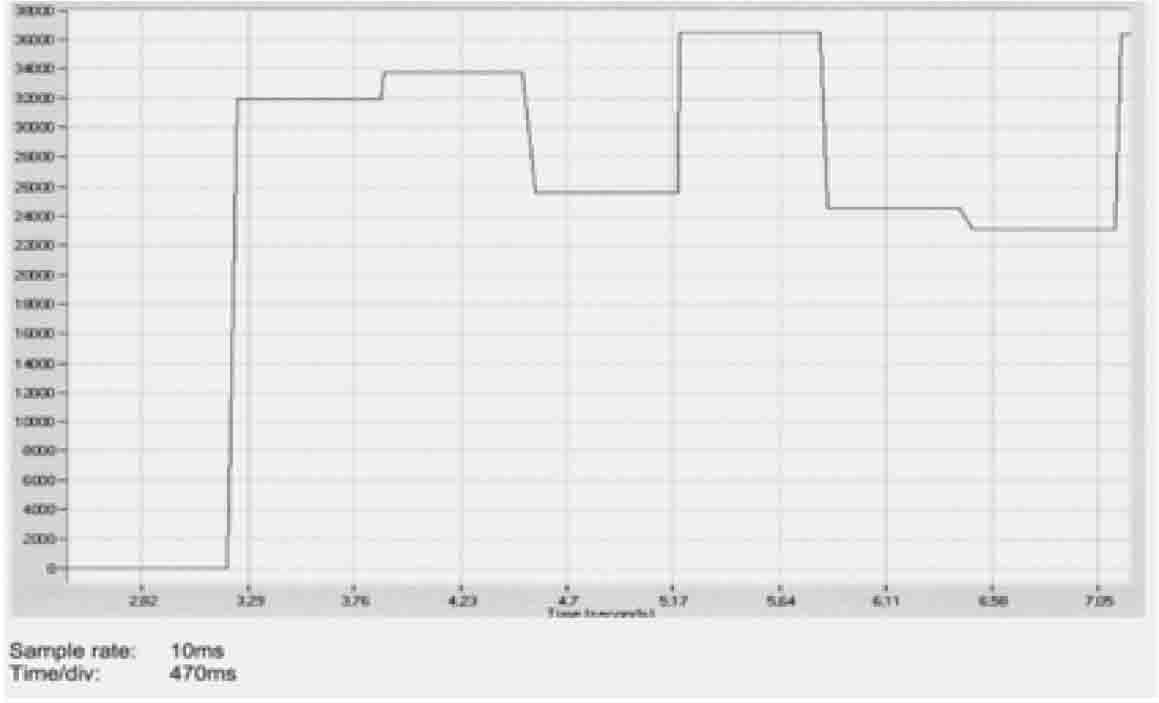
Рисунок 4 – График переходного процесса по позиции при Кп>Кп.опт
Анализ переходных процессов показывает, что при коэффициенте пропорциональности регулятора положения Кп<Кп.опт опт, время переходного процесса увеличивается, а при коэффициенте пропорциональности регулятора положения Кп>Кп.опт возникает колебательный процесс [4].
Данные переходные процессы неприемлемы для условий производства.
Таким образом, аналитический и экспериментальные графики переходного процесса отработки заданного перемещения подтверждают эффективность предложенной методики определения параметров регуляторов системы управления сервоприводом.
Полученная методика может использоваться наладчиками сервоприводов в условиях реального производства.