Математическое описание режимов группового выбега и самозапуска в системах электроснабжения с асинхронными и синхронными двигателями
Автор: Сивокобыленко В. Ф., Лебедев В. К., Кукуй К. А.
Источник:Сборник научных статей по электротехнике Донецкого Национального Технического Университета, 2003 г.
Системы электроснабжения с асинхронными и синхронными двигателями получили широкое распространение в различных отраслях промышленности: металлургических и химических предприятиях, магистральных газо– и нефтепроводах, в системах собственных нужд электростанции и др. Типовая схема таких систем электроснабжения приведена на рис. 1. Для анализа их работы при кратковременных нарушениях электроснабжения требуется учет токов подпитки места короткого замыкания от двигательной нагрузки, определение частоты, фазы и уровня напряжения на шинах питания двигателей, учет перетоков мощностей между отдельными двигателями и узлами нагрузки при их групповом выбеге, выбор уставок устройств релейной защиты и автоматики. При этом требуется определение мгновенных значений параметров режимов (токов, напряжений, мощностей, моментов и др.).
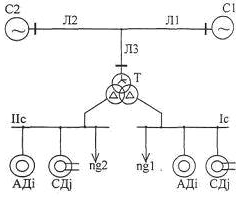
Рисунок 1 – Расчетная схема системы электроснабжения
В работах, посвященных данной теме, в основном рассматриваются узлы нагрузки, содержащие только асинхронные двигатели [1–4], или только синхронные [5–8], и недостаточно освещен вопрос анализа поведения комплексного узла нагрузки, состоящего из произвольного числа асинхронных и синхронных двигателей, статической нагрузки. Кроме того, в указанных работах и других [9–13] рассматриваются и анализируются в основном перерывы питания, вызваны симметричными короткими замыканиями, тогда как известно, что в питающих сетях 110 – 330 кВ с глухим заземлением нейтрали преобладающими являются однофазные короткие замыкания. Решение указанных вопросов и явилось целью настоящей работы, в которой представлено математическое описание коротких замыканий и режимов группового выбега и самозапуска асинхронных и синхронных двигателей, реализованное в цифровой модели на ПЭВМ. При разработке модели принимались общепринятые допущения для электрических машин и трансформаторов (синусоидальность магнитного потока в зазоре, неучёт насыщения магнитных потоков, симметрия фазных обмоток). Типовая схема системы электроснабжения с асинхронными и синхронными двигателями, аналогичная приведенной в [8], может быть представлена из питающих энергосистем С1 и С2 с соответствующими ЭДС Е1, Е2, линий межсистемных связей Л1, Л2 и линии Л3, подключенной глухой отпайкой к линиям Л1, Л2 для питания через понижающий трансформатор Т двигательной и статической нагрузки на напряжении 6 – 10 кВ. Трансформатор Т содержит две расщепленные обмотки низшего напряжения и имеет схему соединений Y/A/A. В такой схеме будем рассматривать симметричные и несимметричные короткие замыкания и кратковременные перерывы питания на стороне высшего (110–330кВ) и низшего (6–10кВ) напряжений.
На рис.1 изображена одна из типовых схем системы электроснабжения, содержащая АД, статическую нагрузку и шунты на секциях для моделирования различной степени удаленности коротких замыканий на отходящих от шин присоединениях. Трёхфазная схема замещения рассмотренной типовой схемы электроснабжения редоставлена на рис.2. В этой схеме к каждой из секций 6 – 10 кВ подключены асинхронные (i=1,2…n) и синхронные двигатели (j=1,2…m), статическая нагрузка ng1, ng2, шунты sh1, sh2 для моделирования коротких замыканий, а также обмотки низшего напряжения трансформатора НН1 и НН2. Сеть высшего напряжения представлена обмотками трансформатора, соединенными в звезду, ЭДС систем ЕЛ1 и ЕЛ2, линиями Л1, Л2, шунтом sh3 для моделирования любых видов коротких замыканий, а также заземлениями нейтралей питающих систем, трансформатора Т и шунта sh3.
Способы определения активных сопротивлений и индуктивностей указанных элементов схемы рассмотрены в работах [8],[11],[12]. Асинхронные и синхронные двигатели представлены схемами замещений с двухконтурным эквивалентным ротором по каждой из осей d, q и, кроме того, в синхронных двигателях учтена обмотка возбуждения по оси d. Дифференциальные уравнения статических элементов (трансформатора, питающих линий, шунтов, нагрузки) записываются в фазных координатах а, b, c, o, уравнения асинхронных двигателей – в неподвижных относительно статора координатах a, b, уравнения синхронных двигателей – во вращающихся вместе с ротором каждой машины индивидуальных осях d, q. При этом на каждом шаге расчета, используя соотношения, приведенные в [12], производится преобразование переменных асинхронных и синхронных двигателей к фазным координатам а, b, c. С целью уменьшения количества вычислительных операций в данной модели за основу приняты для асинхронных и синхронных двигателей дифференциальные уравнения, записанные относительно токов статора и ротора [2],[8].
Выводы
- Разработана математическая модель узла двигательной нагрузки энергосистем, содержащая асинхронные и синхронные двигатели, статическую нагрузку и шунты для моделирования симметричных и несимметричных коротких замыканий. Все элементы узла описаны полными дифференциальными уравнениями и выражены относительно производных токов.
- Получены аналитические выражения для определения на каждом шаге расчета мгновенных значений напряжения в узлах расчета схемы.
- Разработанная модель позволяет анализировать режимы группового выбега и самозапуска, коротких замыканий и другие переходные режимы узла комплексной нагрузки, содержащего асинхронные и синхронные двигатели и может быть использована как на стадии проектирования, так и эксплуатации узлов энергосистем.
Литература
- Ойрех Я.А., Сивокобыленко В.Ф. Режимы самозапуска асинхронных двигателей. – М.: Энергия, 1974. – 96 с.
- Сивокобыленко В.Ф., Лебедев В.К., Кукуй К.А. Математическое моделирование асинхронной нагрузки в режимах группового выбега и самозапуска. – Сб. научн. трудов ДонНТУ. Серия: электротехника и энергетика, вып. 41: – Донецк: ДонНТУ, 2002. – с. 28–34.
- Баков Ю.В. Проектирование электрической части электростанций с применением ЭВМ: Учеб. пособие для вузов. – М.: Энергоатомиздат, 1991. – 272 с.
- Кетнер К.К., Козлова И.А., Сендюрев В.М. Алгоритмизация расчетов переходных процессов автономных электроэнергетических систем. – Рига: Зинатне, 1981. – 166 с.
- Павлюк К., Беднарек С. Пуск и асинхронные режимы синхронных двигателей. Пер. с польск. М., – Энергия, 1971. – 272 с.
- Слодарж М.И. Режимы работы, релейная защита и автоматика синхронных двигателей. – М.: Энергия, 1977. – 216 с.
- Овчаренко А.С., Розинский Д.И. Повышение эффективности электроснабжения промышленных предприятий. – К.: Техника, 1989. – 287 с.
- Сивокобыленко В.Ф., Лебедев В.К., Кукуй К.А. Метод расчета группового выбега синхронной нагрузки электрических систем. – Сб. научн. трудов ДонНТУ. Серия: электротехника и энергетика, вып. 50: – Донецк: ДонНТУ, 2002. – с. 79–87.
- Сыромятников И.А. Режимы работы асинхронных и синхронных двигателей. – М.: Энергоатомиздат, 1984. – 240 с.
- Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. – М.Л., Госэнергоиздат, 1963. – 744с.
- Сивокобыленко В.Ф., Костенко В.И. Математическое моделирование электродвигателей собственных нужд электрических станций. Донецк, ДПИ, 1979. – 110 с.
- Сивокобыленко В.Ф. Переходные процессы в многомашинных системах электроснабжения электрических станций: Уч. пособие. – Донецк, ДПИ, 1984. – 116 с.
- Голоднов Ю.М. Самозапуск электродвигателей. – М.: Энергоатомиздат, 1985. – 136 с.
- Segeda M. Analysis of power system steady states in phase coordinates on PC. III Sympozjum Metody matematyczne w elektroenergetyce, Zakopane, 1993. – P. 97-99.
- Wamkeue R., Kamwa I., Dai–Do X. Numerical modelling and simulation of unsymmetrical transients on synchronous machines with newtral included // Electric Machines and Power System Journal. – January, 1998.