Решается задача непрерывной адаптация частоты вращения ротора турбины к переменной скорости ветра. Это позволяет поддерживать оптимальное соотношение скоростей, что обеспечивает получение максимальной выходной мощности. Избыток мощности компенсируется торможением. Приведена разработанная имитационная модель и результаты моделирования.
This paper focuses on the development and simulation of maximum wind power extraction algorithms for inverterbased variable speed wind power generation systems. System simulation results have confirmed the functionality and performance of the system.
Введение
Развитию возобновляемых источников энергии (ВИЭ) ныне уделяется пристальноевнимание во всех странах мира и на всех континентах [1]. Среди всех видов ВИЭ особое место занимает энергия ветра, которая имеет свои специфические свойства – доступность с одной стороны, и непостоянство, обусловленное вероятностным характером прогноза. Существует множество решений по составу и режимам работы ветроэлектрических уста новок (ВЭУ), зависящих от разных факторов [2]. Естественно на первый план выступает проблема оптимизации режимов работы ВЭУ.
Широко применимы ВЭУ с переменной скоростью вращения генератора, позволяющие получать больше энергии, чем установки с постоянной скоростью вращения. Это связано с тем, что ВЭУ с переменной скоростью вращения проектируются таким образом, чтобы обеспечить максимальное значение аэродинамической эффективности в возможно более широком диапазоне скорости ветра.
Функциональный состав и режимы работы ветроэлектрических установок
Задачей является непрерывная адаптация частоты вращения ротора ω к переменной скорости ветра nв. Это позволяет поддерживать оптимальное соотношение скоростей λ (быстроходности), что обеспечивает получение максимальной выходной мощности. Таким образом имеет место главное преимущество турбины с переменной скоростью вращения – извлечение большей мощности. Однако проблема не только в этом: необходимо также ограничить мощность при достижении некоторой граничной скорости ветра. Согласно принятойпрактике используется два вида ограничения [3]: механическое торможение (МТ) и электрическое торможение (ЭТ1) или их комбинация МТ и ЭТ2, (рис. 1).
Для конкретизации задачи далее рассмотрим ВЭУ (рис. 2) с синхронным генератором с постоянными магнитами (СГПМ), соединенным с потребителем и сетью через автономный инвертор напряжения (АИН), схему управление которым здесь не рассматриваем. В представленной на рис. 2 схеме для ограничения мощности ВЭУ в её системе управления используются четыре различных подсистемы: система управления шагом лопастей; контроллер выходного напряжения генератора; контроллер торможения в звене постоянного тока; контроллер выходной мощности АИН.
Имеется несколько подходов к управлению аэродинамическими усилиями ротора турбины с целью ограничения мощности при высоких скоростях ветра с целью предотвращения поломки турбины. Самый простой и дешевый способ – пассивное управление. При таком методе ограничения лопасти жестко крепятся
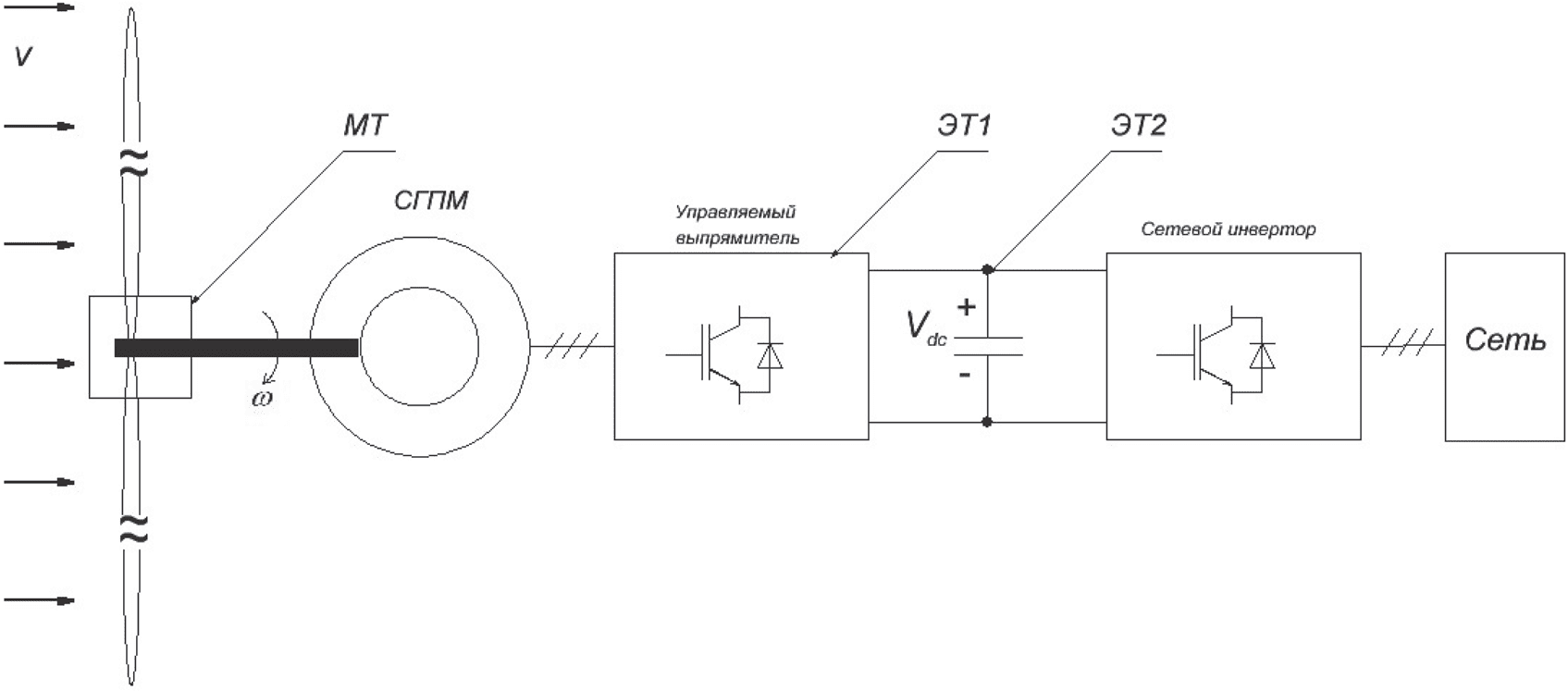
Рис. 1. – Функциональный состав ВЭУ
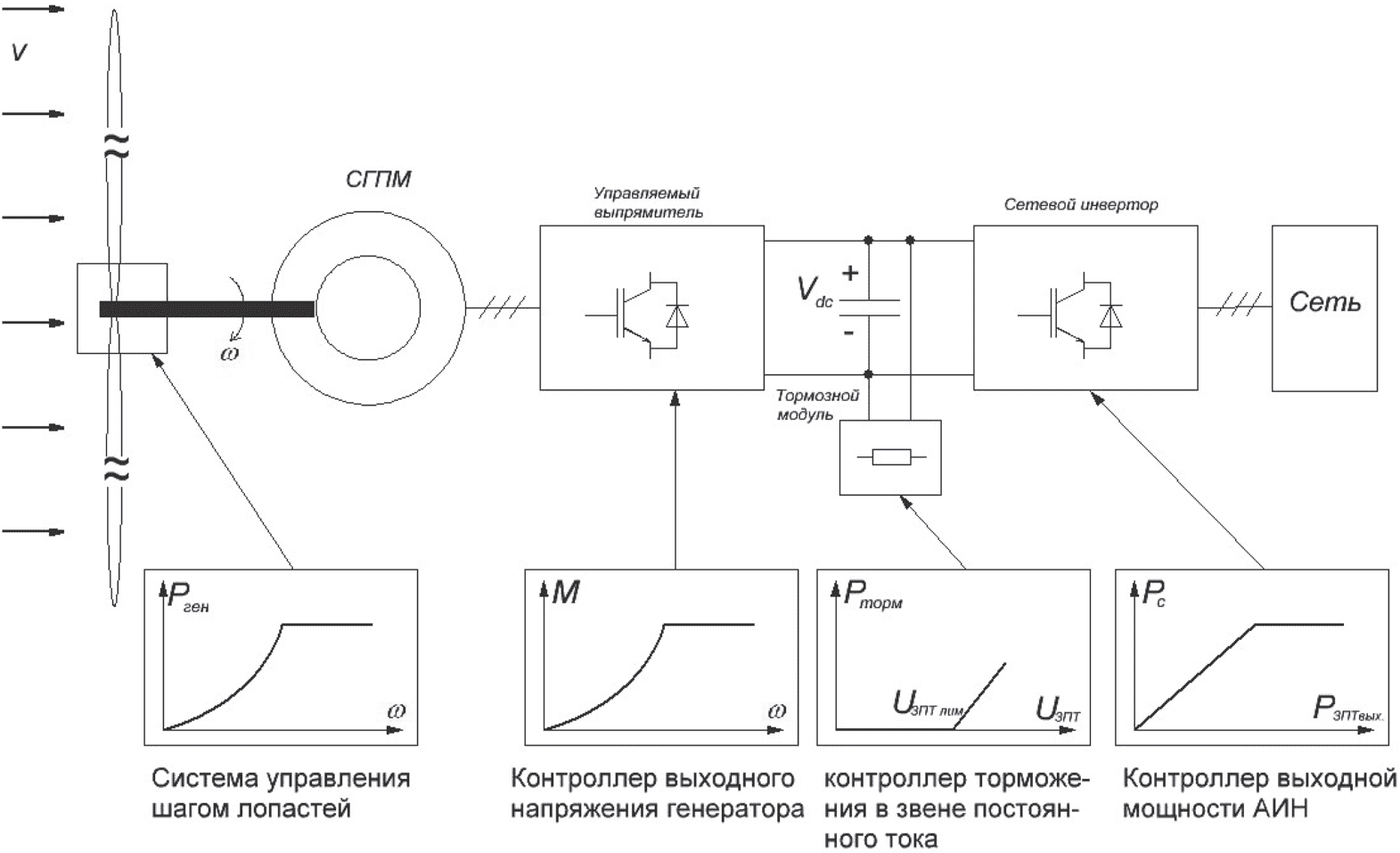
Рис. 2. – Структура системы управления ВЭУ
к ступице ветроколеса, а ограничение выходной мощности осуществляется за счет аэродинамической формы самих лопастей. Второй подход – это активное управление углом поворота лопастей при изменении скорости ветра. Преимуществом этого метода являетсяхорошее управление мощностью, возможности плавного пуска и аварийной остановки. Особенностью данного способа является возможность получения мощности близкой по величине к номинальной мощности генератора при высокой скорости ветра. недостатком является усложнение механизма регулирования, а также колебания мощности при высокой скорости ветра.
В данной работе рассматривается ВЭУ с активным управлением углом поворота лопастей. Управление углом осуществляется по изменению выходной мощности. структура такой системы представлена на рис. 3, где: РМ – регулятор мощности; ИМ – исполнительный механизм, в качестве которого может применяться гидро - или электропривод.
Естественными значениями ограничений являются максимальное и минимальное значение угла βмин, βмакс и его производной. Таким образом, контур регулирования содержит нелинейность типа насыщение
по переменной β и ее производной. Передаточную функцию ИМ можно представить в виде [3] рис. 4, где К1 – коэффициент усиления системы. Пренебрегая насыщением, ИМ может быть представлен как система первого порядка:
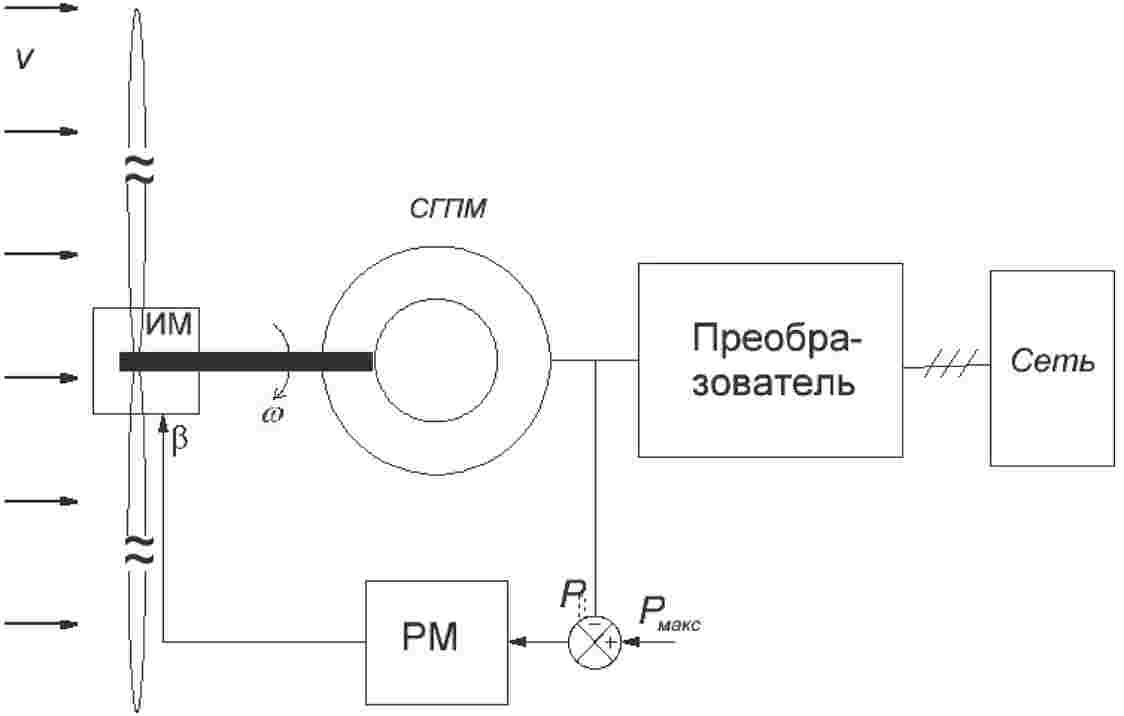
Рис. 3. – Функциональная схема регулятора угла поворота лопастей
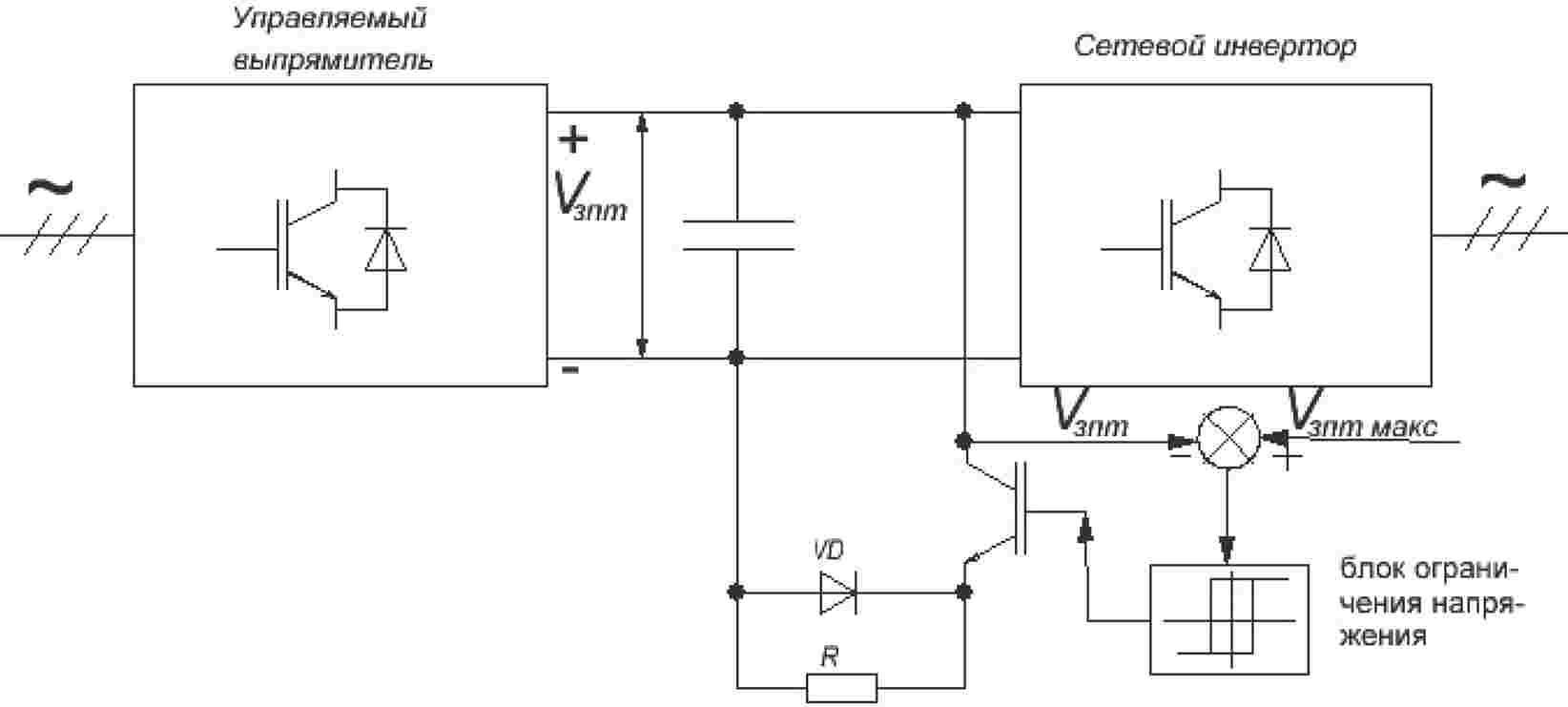
Рис. 4. – Силовая схема преобразователя ВЭУ
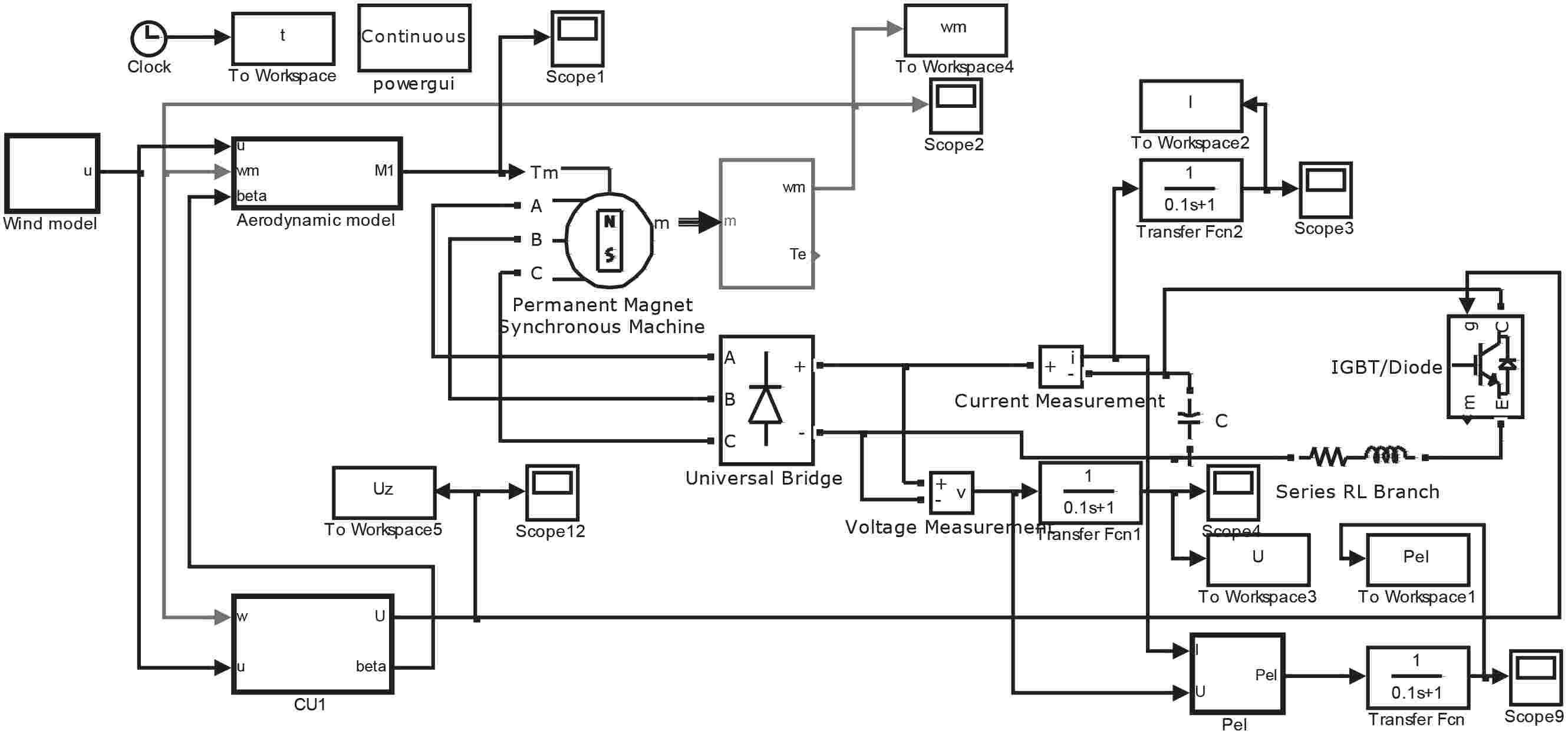
Рис. 5. – Общий вид модели ВЭУ
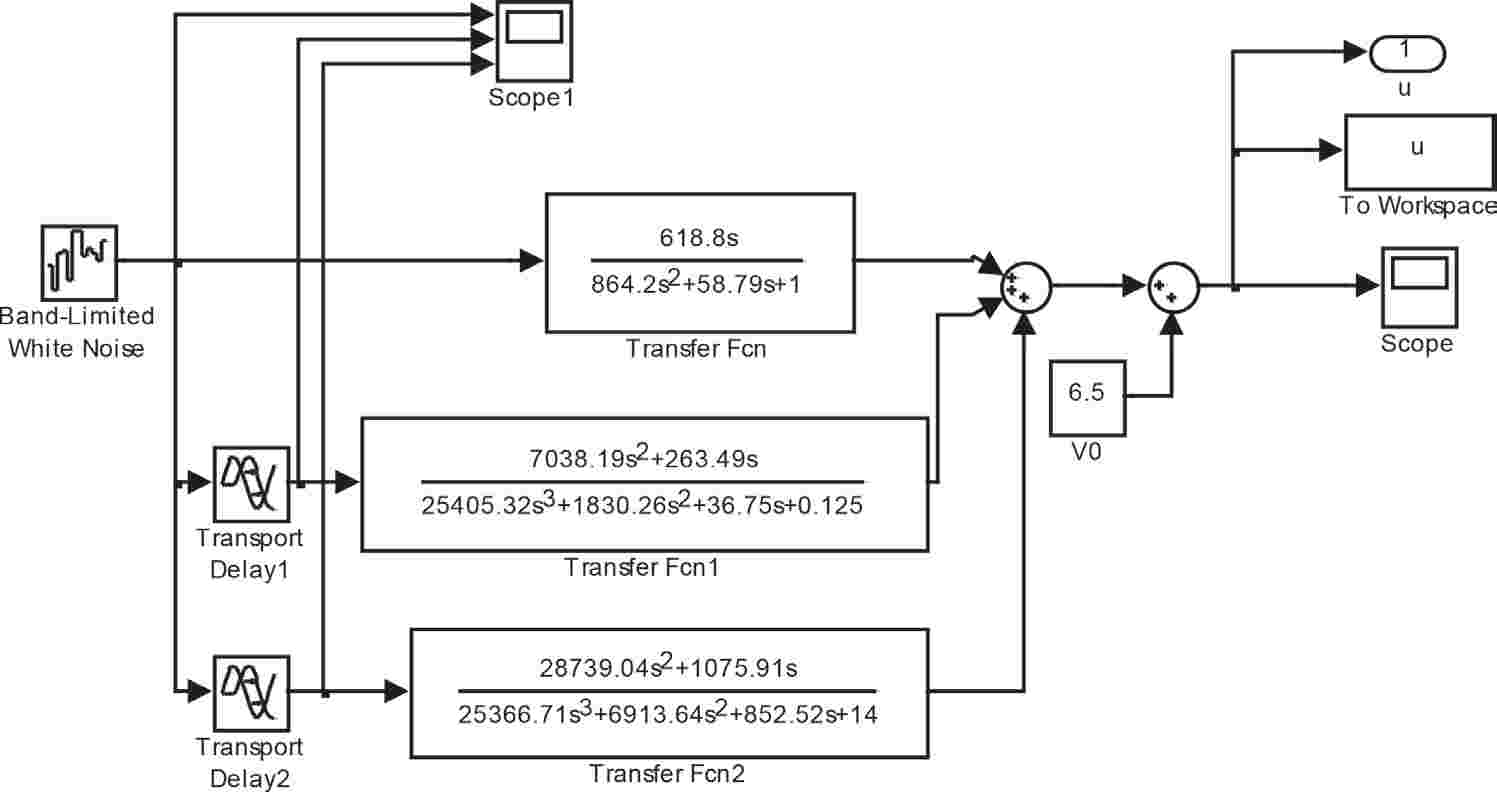
Рис. 6. – Динамическая модель ветра
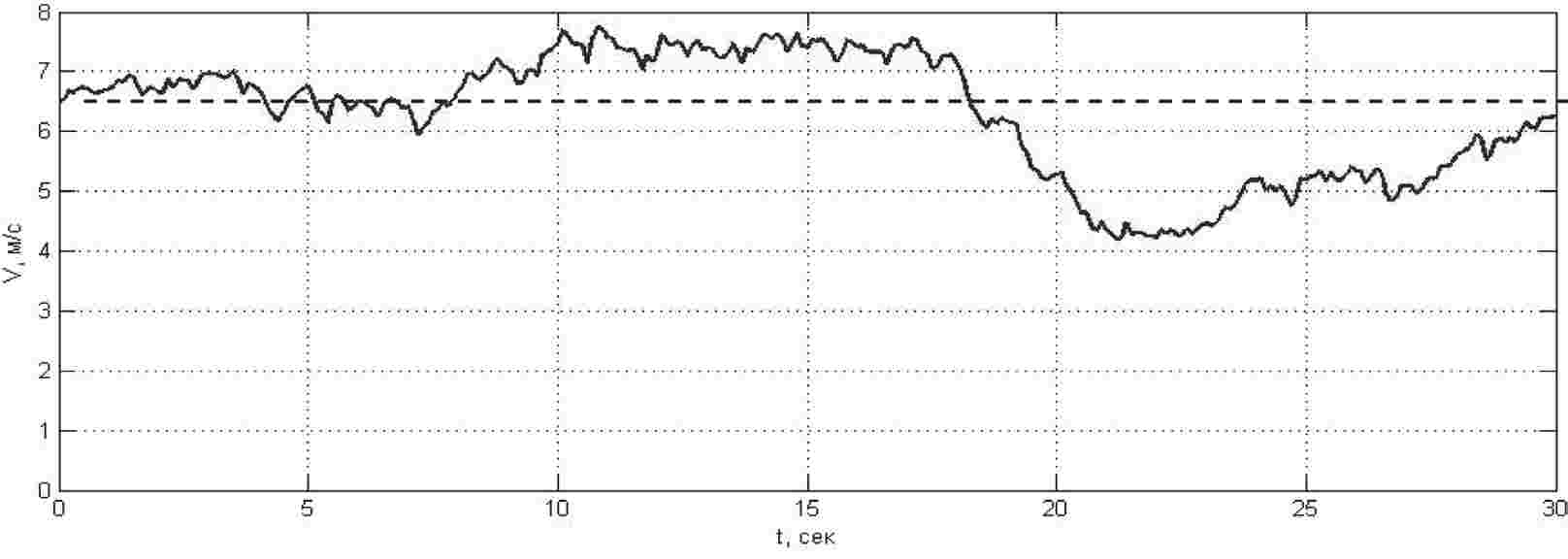
Рис. 7. – Скорость ветра

где Tβ – постоянная времени системы.
Торможение в звене постоянного тока
СГПМ позволяет перегрузки в определенные интервалы времени. При таком условии можно обеспечить торможение турбины посредством тормозного модуля в звене постоянного тока. Силовая схема преобразователя ВЭУ представлена на рис. 4.
Имитационное моделирование и его результаты
Моделировании производилось с помощью программы Matlab в среде Simulinkode23tbс переменным шагом. Общий вид модели ВЭУ представлен на рис. 5. В качестве объекта моделирования была взята ВЭУ малого класса с номинальной мощностью 4 кВт, при номинальной скорости ветра 6,5 м/с. Тип ветроколеса – трехлопастное с горизонтальной осью вращения, радиусом 5 м, профиль лопасти «эксперо». Максимальны коэффициент использования энергии ветра (КИЭФ) для данного типа колес равен 0,47, при значении быстроходности λном = 8,1 и βном = 0° [4]. Ветроколесо снабжено системой управления шагом, при значении угла βмакс = 90° колесо флюгируется. Передаточное число мультипликатора 20. Генератор синхронный с постоянными магнитами трехфазный с номинальным моментом 24 Нм, с номинальной частотой вращения 2300 об/мин. Выпрямитель трехфазный мостовой неуправляемый. Емкость конденсаторов в звене постоянного тока 0,3 мФ. В качестве силового ключа для тормозного модуля использован IGBT транзистор. Значение тормозного сопротивления 2,5 Ома. Максимальное значение напряжения в звене постоянного тока 300 В.
Динамическая модель ветра представлена на рис. 6, основанная на описании турбулентности Девенпортом [5], а на рис. 7 представлен результат моделирования скорости ветра с помощью данной модели.
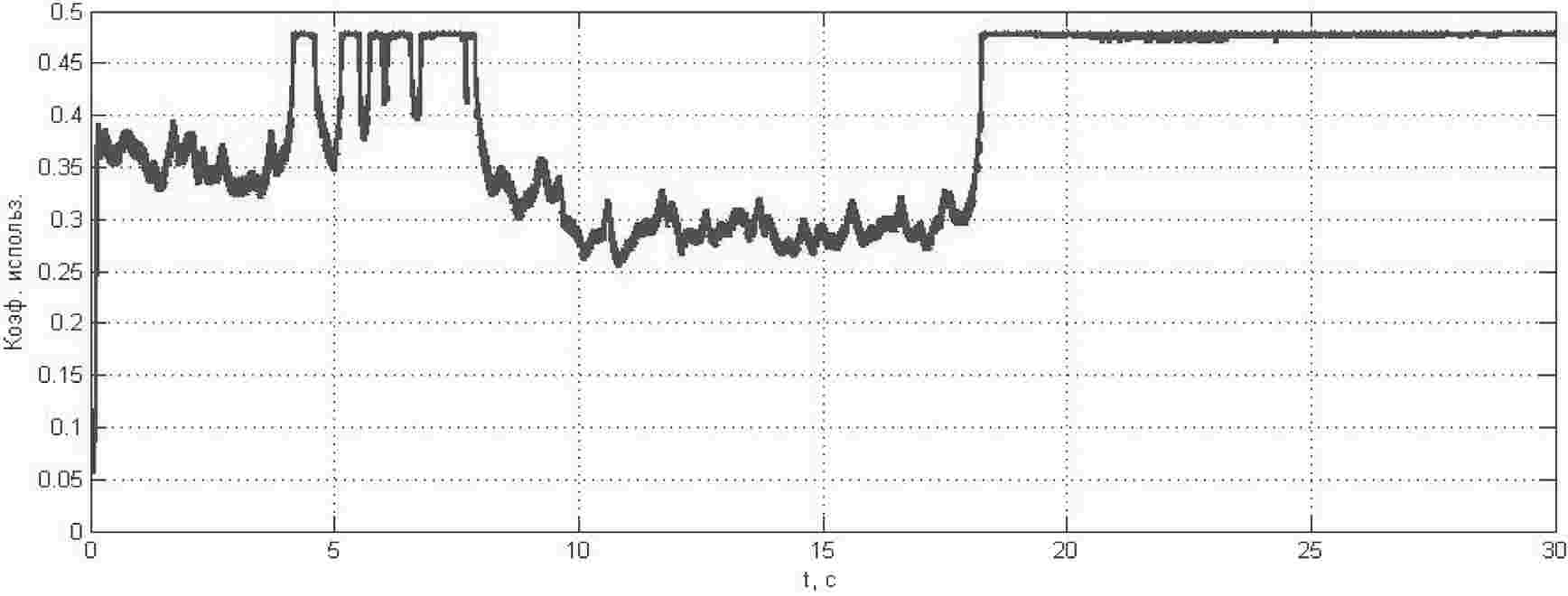
Рис. 8. – Коэффициент использования энергии ветра
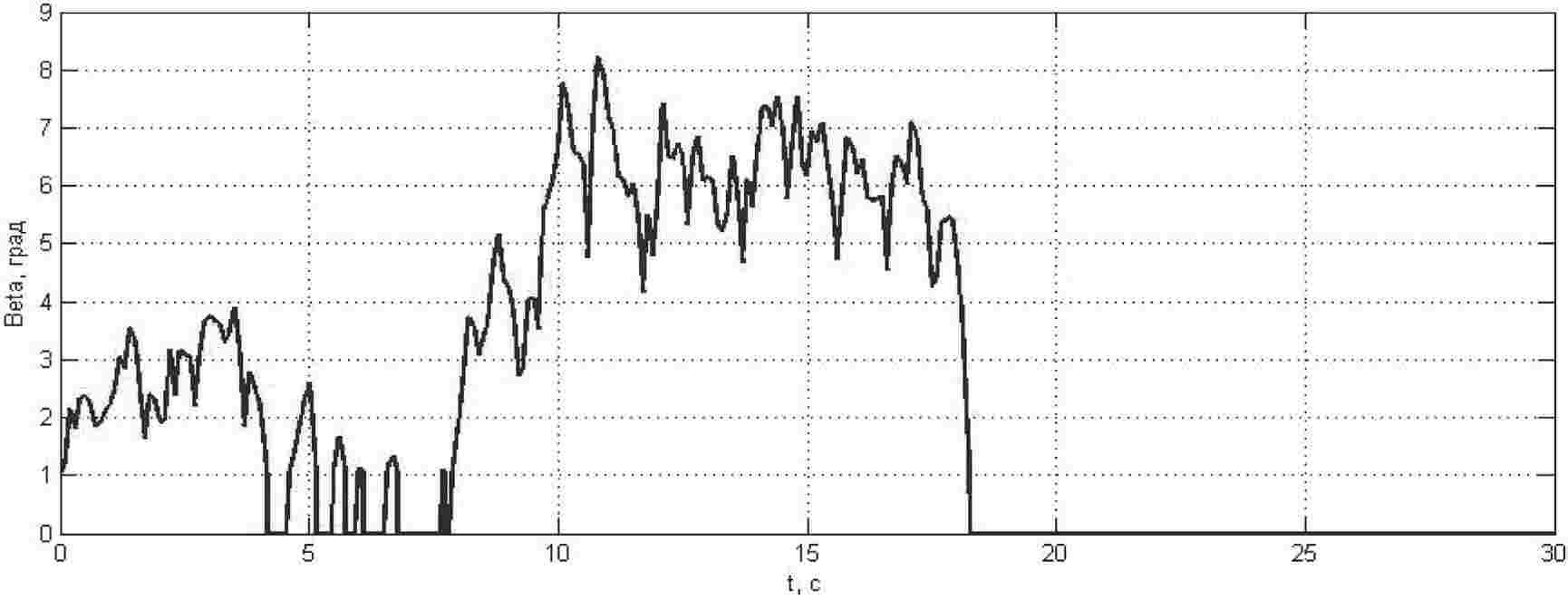
Рис. 9. – Значения угла установки лопастей b

Рис. 10. – Напряжение в звене постоянного тока
На рис. 8 приведен результат моделирования коэффициента использования энергии ветра, а на рис. 9 – значения угла установки лопастей ?. Следует отметить, что на участки времени от 10 до 17 с, когда скорость ветра выше номинального значения 6,5 м/с, вступает в работу система управления углом, дабы не допустить перенапряжение на генераторе (рис. 9). На участке времени от 19 до 30 с моделирования происходит просадка скорости ветра ниже номинальной, но при этом КИЭФ стремится к своему максимальному значению 0,47 для данного ветроколеса, при β = 0 °. Это означает, что ВЭУ работает с максимально возможным КПД для данного ветра. Скорость, а следовательно напряжение генератора при этом должны быть уменьшены до значений меньше номинальных (рис. 10), путем сброса излишка энергии через тормозной модуль и тормозной резистор. Однако в качестве тормозного резистора могут выступить различные накопители энергии, способные эффективно утилизировать энергию.
Заключение
В работе приведены результаты моделирования, которые показывают преимущество управления посредством комбинации управления шагом ветроколеса и ограничением энергии на уровне звена постоянного тока с помощью тормозного модуля. Представленная модель позволяет исследовать системы с большим количеством параметров, нежели стандартная модель ВЭУ в Simulink.
Литература
1. Global Wind Energy Council // Global Wind Statistics 2012 [Electronic resource]. – Brussels, 2013. – Mode of access: http://www.gwec.net/... – Date of access: 04.04.2013.
2. Санкевич С. А. Анализ функциональных схем электрической части ветроэлектрических установок / С. А. Санкевич, Ю. Н. Петренко // Энергетика – Изв. высш. учеб. заведений и энерг. объединений СНГ. – 2014. – № 2. – С. 10–20.
3. Wang D., Chang L. «An intelligent maximum power extraction algorithm for inverter-based variable speed wind turbine systems», IEEE Transactions in Power Electronics, vol. 19, no. 5, pp. 1242–1249, September 2004.
4. Кривцов В. С., Олейников А. М., Яковлев А. И. Неисчерпаемая энергия. Кн. 1. Ветроэлектрогенераторы – Харьков: ХАИ, 2003. – 400 с.
5. Матвеенко О. В. Моделирование на ЭВМ динамической составляющей скорости ветра в зависимости от времени / О. В. Матвеенко, И. М. Кирпичникова // International Scientific Journal for Alternative Energy and Ecology. – 2010. – № 1.
6. Санкевич С. А., Петренко Ю. Н. Оптимизация режимов работы ветроэнергетической установки. Системный анализ и прикладная информатика, № 1-2, 2013, с. 26–31.
7. Санкевич С. А. Моделирование системы управления ветроэлектрической установки / С. А. Санкевич, Ю. Н. Петренко // Информационные технологии в образовании, науке и производстве: II Международная научно-техническая интернет-конференция, 4 декабря 2014 г. Секция: Информационные технологии в производстве и научных исследованиях [Электронный ресурс]. – [Б.и.], 2014. URI: https://rep.bntu.by/...
{kind=link}