
Рис. 1 – Технические характеристики некоторых МР
УДК 004.896:621.865: 623.43
Мобильные мини–роботы разведки: текущее состояние, характерные черты и общие тенденции развития.
Автор: В. А. Васильев
Источник:КиберЛенинка
В работе анализируются текущее состояние и общемировые тенденции в сфере создания малоразмерных робототехнических средств обеспечения разведывательных операций. Выделяются основные принципы и перспективы развития мобильных мини–роботов. Результаты работы могут быть полезны при формировании концептуального облика вновь создаваемой техники рассматриваемого класса.
The current state and worldwide tendencies of small scout robotic tools development are analyzed. The general design principles and trends of small unmanned ground vehicles (SUGV) are extracted. The analysis results may be useful for new SUGV concept development.
Assessment; mini–robot; mobile; man–portable; lightweight; compact; tracked; wheeled; chassis; modularity; versatility; adaptation.
В последнее десятилетие значительно возрос интерес к созданию различных типов сверхлегких и малозаметных робототехнических средств разведки, в том числе мобильных мини–роботов наземного базирования (дшіее ММР, в зарубежной литературе общепринята аббревиатура SUGV – Small Unmanned Ground Vehicles).Активизация работ в этой области связана с двумя объективными причинами. Во–первых, это доктрина ведения современных боевых действий, предусматривающая максимальную роботизацию вооруженных сил с целью минимизации потерь среди личного состава (а в перспективе – ведение боевых действий только лишь с помощью полу– или полностью автономных робототехнических систем). Примером здесь может служить действующая программа перевооружения армии США “Боевые системы будущего”. Во–вторых, это достигнутые успехи в области оптимизации и миниатюризации всех составных элементов роботов, как комплексных мехатронных систем: электромеханических приводов, компонентов систем управления, вычислительных модулей, датчиков различной природы, источников питания и др., а также развитие информационных, телекоммуникационных и сетевых технологий, теории управления автономными объектами и.
И если к середине текущего десятилетия к ММР можно было отнести лишь единичные разработки [1], например iRobot PackBot, Dragon Runner, BomBot, то на сегодняшний момент созданием подобной техники занимаются во всех ведущих странах мира (рис.1).
Рис. 1 – Технические характеристики некоторых МР
Особенности мобильных мини–роботов. Основным критерием для выделения ММР в отдельный класс является ограничение их веса максимум 20 кг (в большинстве разработок 8–15 кг). Такое ограничение следует из требования транспортировки всего робототехнического комплекса (РТК), т.е. мобильного робота вместе с постом управления силами одного, максимум двух человек (рис. 2). В свою очередь, малый вес определяет ряд других особенностей, выделяющих ММР на фоне других РТК. Это:
Рост интереса к ММР вполне закономерен. Опыт их применения в Ираке и Афганистане доказал эффективность ММР при решении целого ряда задач. В первую очередь – это видеонаблюдение и разведка при проведении боевых и специальных операций в условиях городской застройки. Главная цель здесь – сохранение личного состава при действиях в потенциально опасной обстановке.
В целом же перед ММР формулируется следующий круг задач (в том числе и ):
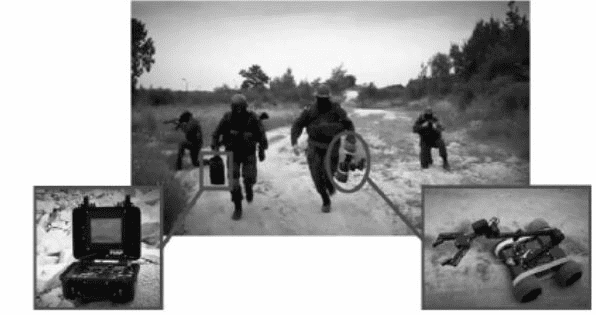
Рис. 2 – Доставка мобильного малоразмерного робототехнического комплекса
Анализ текущего уровня развития. Основные требования, предъявляемые к мобильным малоразмерным робототехническим комплексам (ММРК): максимальная подвижность при движении как на относительно ровных поверхностях, так и в условиях пересеченной местности.
Здесь можно обнаружить несколько противоречий, вытекающих из небольших размеров и веса ММР, их функционального назначения и предъявляемых требований.
Во–первых, широкий круг ставящихся задач, т.е. по сути, универсальность, требует установки на малоразмерный робот большого спектра специального оборудования: от простейших средств аудио– видеонаблюдения, до манипулятора.В то же время ММР должен быть максимально прост и дёшев.
Разрешить это противоречие может модульный принцип построения ММР.Можно сделать вывод о первой общей тенденции. Это создание максимально простых и универсальных базовых платформ с большой несущей способностью, универсальными конструктивными и электрическими интерфейсами, предполагающими возможность дальнейшего их дооснащения различными типами навесного оборудования (рис. 3). То есть, по сути, создается целое семейство различных модификаций ММР с возможностью перенастройки под конкретные задачи (PackBot, SUGV300, Dragon Runner DR20, EyeDrive). При этом обеспечивается максимальная гибкость ММРК за счет возможной его адаптации конечным пользователем под требуемые именно ему задачи. Такой подход также способствует упрощению и удешевлению разработки новых типов специального оборудования.
Второе противоречие связано с необходимостью обеспечения подвижности мини–робота в любых условиях движения. В качестве носителей для РТК наземного базирования традиционно применяются мобильные платформы (МП) с колесными или гусеничными движителями, обладающие своими достоинствами и недостатками. С уменьшением размеров МП серьезной проблемой становится обеспечение их движения по пересеченной местности, преодоление препятствий, соизмеримых или даже превосходящих собственные размеры. Следствием этого стало развитие движителей с активными элементами изменения конфигурации шасси (PackBot, SUGV, VIPER, Cameleon, СМР–01 [2]).
Также развиваются теоретические исследования по совершенствованию практического результата, в том числе при создании малоразмерных шагающих разведывательных роботов (проект RHEX фирмы Boston Dynamics, США).
Модульный подход применим и при создании шасси ММР. В ряде разработок можно видеть построение на основе некоторой базовой конструкции различных вариантов шасси, в том числе с возможностью перенастройки с одного типа .
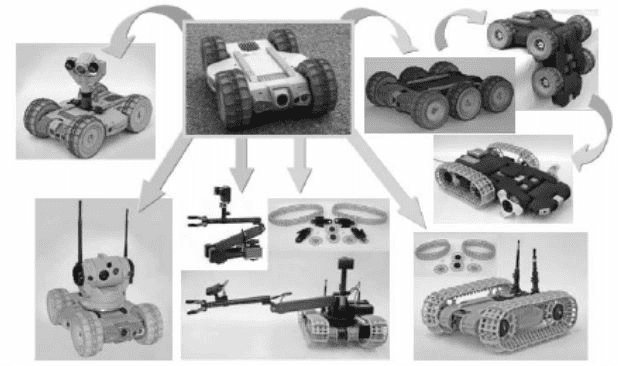
Рис. 3 – Модульная архитектура построения ММР (на примере робота DR20)
Весьма перспективным видится дальнейшее развитие такого подхода в виде конструктивного обеспечения возможности оперативной и без использования специального инструмента перенастройки шасси с одного типа движителя на другой. Это дает дополнительную гибкость и возможность адаптации шасси, а следователь, что в некоторой степени позволяет разрешить второе отмеченное противоречие.
Третье противоречие связано со сложностью управления ММР и все возрастающей нагрузкой на оператора, учитывая очень низкое расположение телекамер и ограниченность получаемой с них информации. Отчасти эта проблема решается установкой на ММР дополнительных устройств, обеспечивающих увеличение высоты наблюдения телекамер и круговой обзор обстановки вокруг робота (SUGV320, EyeDrive). Однако для решения целого спектра задач очевидной становится необходимость повышения автономности и интеллектуализации ММР.
В то же время развитие теории управления коллективами роботов [3] в перспективе должно привести к необходимости организации совместных действий.
Все это определяет еще одно общее направление развития ММР – их интеллектуализация и соответствующее техническое оснащение с целью обеспечения ориентации робота в пространстве, детектирования препятствий, принятия решения.
Таким образом , анализ существующих аналогов позводяет говорить о следующих общих принципах построения ММР, концептуально определяющих технический облик, как существующих, так и будущих разработок: