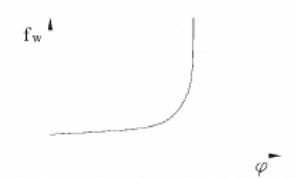
Рис. 1 – Зависимость f = f (ф)
УДК 629.11.012
Автор: Г. О. Котиев, В. А. Горелов
Источник: КиберЛенинка
В статье приведено описание предложенного закона распределения мощности по колесам транспортного комплекса с индивидуальной схемой трансмиссии, позволяющего повысить показатели опорной проходимости. Представлена расчётная схема объекта и основные положения разработанной математической модели, предназначенной для имитационного моделирования прямолинейной динамики по несвязному грунту. Обозначены направления дальнейших исследований.
Срастеризуется большими затратами энергии, обусловленными значительным буксованием (SB) ведущих колес. Такое буксование, связанное c экскавацией грунта и бульдозерным эффектом, приводит к значительным энергетическим затратам. Энергетические потери (fw) значительно возрастают с увеличением коэффициента буксования (рис. 1), а коэффициент свободной тяги (Р ) – растёт незначительно и имеет определенное предельное значение (рис. 2).
Движение возможно только с определенным ограниченным значением свободной тяги. С ростом буксования тяга перестает увеличиваться, и вся энергия двигателя тратится на преодоление увеличивающейся силы сопротивления движению.
Так как удельная свободная сила тяги определяется соотношением реализуемой силы тяги к нормальной нагрузке на колесе PXi/PZ, то для обеспечения опорной проходимости необходимо обеспечить равенство этого соотношения максимальному значению коэффициента сцепления для текущего опорного основания.
Рис. 1 – Зависимость f = f (ф)
Однако реализация непосредственного определения коэффициента сцепления колеса с опорной поверхностью при движении крайне затруднительна (хотя робототехнический комплекс и может быть оснащен специальным оборудованием для определения несущей способности грунта). В связи с этим наиболее рациональным является возможность выбора оператором режимов в зависимости от его субъективных оценок условий движения и визуального восприятия свойств опорной поверхности, что в настоящее время реализовано для системы регулирования давления воздуха в шинах. Система же управления подводимой мощностью к колесу определяет текущее соотношение Px/Pzi и сравнивает с выбранным оператором максимальным коэффициентом сцепления для соответствующих дорожных условий.
Соотношение сил Px/PZi возможно определять с помощью установки на элементах подвески колесного движителя направленных тензодатчиков, определяющих продольные и вертикальные нагрузки на колесе. Таким образом, регулируя частоту вращения колесного движителя путем управления тягой на колесе, можно обеспечить необходимое значение тяги при минимальных энергозатратах.
Предложенный алгоритм управления приводными двигателями реализуется с помощью аппарата Fuzzy Logic
.
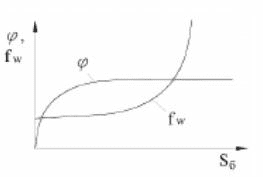
Рис. 2 – Зависимости ф(S ) и f (S )
В качестве входного сигнала фаззи-реглятора выбрана величина Д(Px /Pz),которая представляет собой относительную разницу между соотношением (Px /Pz )0 , выбираемым оператором, исходя из своих представлений о характеристиках опорного основания, и действительной величиной (Px / Pz )ШП1, определяемой с помощью датчикового оборудования:
Выходным параметром контроллера является h – положение условного органа управления (педали «газ») для приводного двигателя каждого движителя. В системе предусмотрено ограничение: скорость при регулировании по соотношению Px/Pzi может быть увеличена, но не больше, чем задано, т.е. из двух выходных значений h для fuzzy–регуляторов (по скорости V и по соотношению Pxi/Pzi) .
Построение математической модели движения комплекса рассмотрено на примере трёхосного объекта с индивидуальным, дифференциальным и блокированным приводом колёс. Расчётная схема прямолинейно динамики, представленная на рис. 3, принята с учётом характера решаемой задачи и описывается соответствующими уравнениями движения (2).
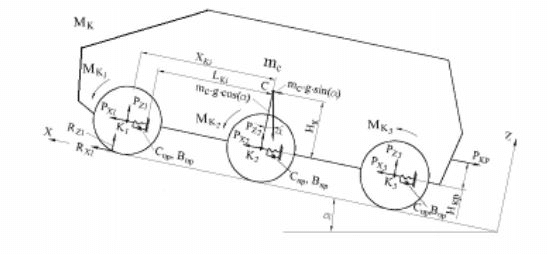
Рис. 3 – Расчетная схема движения комплекса
Проведенные с помощью имитационного математического моделирования на ЭВМ исследования прямолинейного движения робототехнического комплекса по деформируемому грунту при использовании предложенного закона распределения мощности позволили сделать следующие выводы (в качестве одного из критериев оценки проходимости была выбрана свободная сила тяги на крюке): при благоприятных условиях движения (без нагрузки на крюке и (или) в установившемся режиме) эффективность комплекса, оборудованного системой обеспечения опорной проходимости, не отличается от прототипов со стандартными трансмиссиями (дифференциальной и блокированной). В случае движения с нагрузкой на крюке система обеспечения проходимости, основанная на использовании закона распре, -ние силы тяги. Исходя из сцепных свойств опорного основания; проведённая по основным принятым критериям сравнительная оценка прототипов с различными схемами трансмиссий подтвердила повышение проходимости робототехнического комплекса, оснащенного системой обеспечения опорной проходимости. При решении транспортных задач на несвязных грунтах; применение системы обеспечения опорной проходимости снижает требования к квалификации оператора по воздействию на органы управления.
Основное направление дальнейших исследований заключается в создании системы распознавания условий движения, которая позволит исключить субъективные оценки дорожных условий, и тем самым, повысить эффективность управ.