Аннотация
Робототехника набирает популярность как метод, который обеспечивает богатый, персонализированный и экономически эффективный вид физиотерапии для людей с некоторой степенью верхнего паралича конечностей, таких, как те, кто перенес инсульт. Эти роботизированные реабилитационные системы часто бывают мощными, а экзоскелетные системы могут быть прикреплены к человеку в ограничительной мере. Поэтому обеспечение механической безопасности этих устройств, прежде чем они вступают в контакт с такими лицами, является одним из приоритетов. Кроме того, реабилитационная система может использовать новые системы датчиков для измерения текущего положения позиции. Это может использоваться для захвата и оценки движений пациента, которые, в первую очередь, необходимо проверить на точность внешней системой. Мы представляем ALAN-Arm - это человекоподобный робот-манипулятор предназначен для использования как для точности сравнительного анализа, так и тестирования безопасности робототехнических систем реабилитации. Система должна быть подключена к устройству реабилитации, а затем должна воспроизвести сгенерированную траекторию или повторить движение оператора, а также автономно играть в реабилитационные игры или какую-либо активность. Испытания ALAN-Arm показали, что могут воссоздать путь генерируемой траектории движения с максимальной погрешностью 14,2 мм (среднее значение =5,8 мм) и выполнять циклические движения до 0,6 Гц с низким усилением(<1.5dB). Воспроизведение траекторий данных, снятых с помощью руки человека, в значительной степени сохраняет характеристику человеческого движения с немного большей длиной пути и меньшим нормализованным рывком
I. ВСТУПЛЕНИЕ
В развитых странах мира, инсульт остается одной из ведущих причин инвалидности. В Великобритании, инсульт оставляет 77% выживших с какой-либо формой поражения верхних конечностей [1]. Для решения этой проблемы, использование вспомогательных робототехнических технологий были исследованы все чаще в последние несколько десятилетий, порождая несколько устройств, специально адаптированных для оказания помощи в восстановлении двигательных навыков индивидуума [2-5]. Эти реабилитационные устройства позволяют пациентам выполнять упражнения и показали обнадеживающие результаты для восстановления их способностей, чтобы помочь людям вновь обрести моторику [6]. Тем не менее, для всех реабилитационных систем такого рода необходимо тщательное тестирование, проверка и разрешение врача для того, чтобы стать коммерческим устройством.
Продвинутая система автономной нейрореабилитации верхних конечностей (ALAN) началась как часть бакалаврского проекта, который направлен на поставку нового робота-руки, который подражает человеку, и создает автоматизированное решение для тестирования простых систем реабилитации. ALAN-Arm была спроектирована и разработана вместе с пакетом программного обеспечения на заказ, чтобы обеспечить возможность проверки устройств реабилитации, делая это физически и манипулируя системой, как пользователь
II.Предпосылки
Тестирование реабилитационной робототехники поднимает сложные технические и этические вопросы, из-за больших силовых возможностей большинства систем и прямого физического интерфейса с пациентом. Потенциальные опасности, вызванные компонентом сбои, может включать перемещение части тела за пределы диапазона движение, перемещение пациента с высокой скоростью, или применение чрезмерная сила для пациента [7]. Пока еще нет ни одного международного стандарта безопасности для реабилитационных роботов, это важно, чтобы устройства были тщательно оценены для безопасности перед использованием с людьми, из-за их сложности [7-9]. Некоторые системы используют программные архитектуры, которые гарантируют, что все команды проходят через систему безопасности до срабатывания, но полагаться следует на точные показания датчика и стабильное программное обеспечение, чтобы было более эффективно.
Оценка риска с учетом возможных отказов может быть полезным инструментом в оценке безопасности роботов [7, 9]. Тем не менее, оценка частоты возникновения потенциального риска требует некоторого количества данных. Вероятность отказа системы напрямую связана с количеством работы компонентов [7]. Следовательно, существует необходимость в повторяемом долгосрочном тестировании реабилитационных систем с целью получения доказательств о частоте отказов его подсистем и отдельных компонентов
Тестирование конструкции, как правило, включает в себя создание потенциального сценария риска в модели системы либо физически, математически или в моделировании программного обеспечения. В то время как модели имеют возможность эффективно тестировать сценарии в быстрой последовательности, их внутренняя идеализация может заставить их искажать реальный мир. Поэтому идеальная оценка безопасности для реабилитационного устройства будет объединять методы моделирования с тестированием в реальном мире. Использование людей в тестах представляет потенциально неприемлемый риск для безопасности. Однако компромисс может заключаться в разработке устройства, которое имеет способность имитировать использование устройства пациентом максимально точно. Устройство все равно будет моделью, и поэтому может быть использовано для выполнения быстрых и больших повторяемых тестов. Насколько известно, таких устройств не было создано на данный момент
III. ДИЗАЙН и РАЗВИТИЕ ALAN-Arm
ALAN-Arm, разработанная как решение для облегчения необходимость тестирования потенциально небезопасной реабилитации на людях системы, использует сервопривод, и 3D-печать для гуманоидной руки.
Этот проект оказался слаб для подражая кинематики человеческой руки, и был преемником более сложной системы. Новый дизайн, представленный здесь, сохраняет свой человеческий облик и, показывает плечо, локоть и запястье, сустав и пять пальцев руки. Он приводится в действие с использованием трех отдельных 2DOF роботов, каждый из которых контролирует либо плечо, локоть или запястья, что позволяет с большей точностью производить движение, измеренной на руке. Рука ALAN-Arm может схватить ручку и использовать устройство для выполнения движений в течение длительного периода времени Устройство имитирует полную левую или правую верхнюю конечность человека, и предназначено для использования как с экзоскелетом, так и с эндефектором на основе реабилитационных систем.
A. Механическая сборка
ALAN-Arm состоит из трех основных суставов: плечевой сустав, который может выполнять отведение плеча-сгибание и приведение-расширение; локоть может имитировать человеческое сгибание / разгибание локтя; запястье пассивно поддерживает только радиальное и локтевое отклонение. Локоть и суставы запястья являются более сложными, чем плечо, как они были сконструированы таким образом, что центры вращения соответствующих звеньев находились на одной и той же точке, сохраняя при этом широкий диапазон движения (см рисунок 1). Плечо и запястье могут свободно перемещаться в горизонтальной плоскости с помощью своего специализированного привода. В то время как локоть также может быть приведен в действие в плоскости его приводом, но он ограничен в своем движении из-за ограниченного набора допустимых положений для локтя, плеча и запястья. Чтобы позволить плечу двигаться вертикально, пассивный параллельный шарнир используется на втором звене локтевого робота.
Рука была распечатана с помощью 3D печати и разработанная на основе костной структуры человеческого аналога. Размеры роботизированных пальцев соизмеримы с пальцем взрослого человека [4]. Поместив три оптических маркера отслеживания на каждом из пальцев (по одному на сустав) для пяти участников (пальцев), движение руки были захвачены при выполнении естественного движения захвата, чтобы захватить цилиндрическую ручку. Приобретенные данные позволили разработать модель человеческой руки, и упростить ее до одного привода на палец. Рука робота не позволяет имитировать широкий диапазон сцепления, на которые способен человек, как это было разработано вокруг воспроизведения вышеупомянутой задачи хватаясь за цилиндрическую рукоятку точно также, как возможно с кинематической точки зрения
Робот сторона представляет собой автономный блок, который используется пассивно при подключении к ALAN-Arm, и может быть сделана, чтобы захватить ручку, затянув соответствующие сухожилия, прикрепленных к каждому пальцу. Руки показано на рисунке 1 является правой рукой, но могут быть заменены на левой руке, чтобы сделать систему работать как левой рукой. Система полностью автономна в колесном раме, построенном из Rexroth распорок, что позволяет устройство быть относительно портативным. Конструкция рамы позволяет три привода, чтобы быть уменьшено или увеличено, чтобы приспособить различные потребности тестирования. АЛАН-дуга может перемещать руку в 2D плоскости и имеет диапазон движения приблизительно 200 мм х 300 мм.
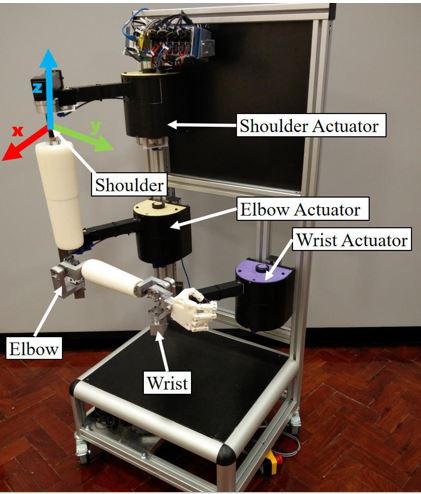
"Рисунок 1 - Система ALAN-Arm"
B. системная интеграция
Программное обеспечение ALAN-Arm, разработанный в компании National
Программное обеспечение ALAN-Arm, разработанный в компании National Программное обеспечение ALAN-Arm, разработанное на LabVIEW, состоит из трех важнейших, независимо программируемые приложения: пользовательский интерфейс (Пользовательский интерфейс), реальное временя (RT) и FPGA (рисунок 2). Приложения пользовательского интерфейса и RT основаны на шаблоне дизайна потребительского / производителя, который является масштабируемым и эффективным обеспечивая асинхронное выполнение нескольких процессов, включая сбор данных, генерации данных, связь и сложные кинематические расчеты. Пользовательский интерфейс работает на ПК с Windows и позволяет управлять роботом в нескольких различных режимах (смотрите раздел III.D). Приложение RT работает на контроллере NI cRIO9022. Он использует команды движения, полученные от ПК и помещает их через модель человеческого движения обеспечение последующего приведения в действие является плавным и похожим на человека (смотрите раздел III.C). Затем он рассчитывает шесть совместных углов с использованием обратной кинематики и отправляет их в ПИД-регуляторы, работающие на FPGA. Используя показания энкодера, шесть ПИД-регуляторов рассчитывают требуемый рабочий цикл ШИМ для двигателей постоянного тока в трех приводах 2DOF.

"Рисунок 2 - схема, ALAN-Arm системы"
C. Моделирование человеческого движения
Для того, чтобы сделать движение ALAN-Arm в аналогичной манере человеческой руке, была использована упрощенная модель человеческой руки. На основе требуемого плеча и положение рук, он создает действительные позиции запястья и локтя. Положение запястья выбирается, используя тот факт, что лучезапястный сустав не может выполнять сгибание или расширение, что ограничивает его возможное положение данного конкретно локтя и положения рук.
В модели, локоть имеет множество действительных позиций, все из которых лежат на пути пересечения между двумя сферами: сосредоточенными на плече и запястье, и с радиусами верхнего и нижнего плеча соответственно. Эти параметры может быть использованы для определения положения локтя во время этого пути. Параметр представляет собой угол между двумя плоскостями: один определяется вектором положения плеча к запястью и любого вектора в оси z; а плоскость определяет положение плеча, локтя и запястья. Этот угол может быть выбран с помощью пользовательского интерфейса или может быть получен путем вычисления его на основании данных реального пациента, в зависимости от режима ввода (смотрите раздел ID). Эта модель также гарантирует, что конечные эффекторы каждого из трех исполнительных роботов в правильной конфигурации, могут приспособить структуру руки. То есть, чтобы убедиться, что расстояние между локтем и запястьем фиксируется (которая равна нижней длине стрелы), так же расстояние между плечом и локтем должно быть фиксированным (равный верхней длине плеча). Это позволяет системе двигаться естественным образом, а значит, приводы не применяют напряжение или сжатие звеньев руки.
Второй важный аспект системы, который позволяет ей двигаться более по-человечески это интерполяция и фильтрация, который выполняется по командам движения. Командой ввода движения может быть любой из простых шагов входа или сложных путей (смотрите раздел III.D). Например, если мы дадим команду для перемещения руки в положение 10 см, мы не хотим, чтобы система пыталась добраться туда как можно быстрее, а хотим, чтобы она переходила на новую позицию плавно и более реалистично. Как правило, человеческие движения профилей в направлении мишени были смоделированы как усилие, чтобы свести к минимуму связанный рывок движения и скорость следует образной кривой симметричной колокола [11] [12]. Исходя из этого, функция реализована в ALAN-Arm фильтрует входные позиции для создания движения профили, которые имеют эти характеристики. Это достигается использование взвешенного фильтра скользящих средних по позициям спроса с весовым профилем колоколообразной кривой
D. Пользовательский интерфейс и функции
Богатый пакет программного обеспечения ALAN-Arm - это то, что делает систему такой мощной. Он имеет панель управления для настройки многих параметров системы, включая PID-константы для индивидуальных ссылок роботов, длины и смещения ссылок, калибровка коэффициенты и т. д. Максимальная скорость руки ALAN-Arm может быть установлена, чтобы позволить устройству повторить движения человека от строго инвалидных до сверхчеловеческих. Каркасное представление системы визуализируется в 3D на интерфейсе пользователя. ALAN-Arm также обладает способностью становиться пассивным, что позволяет записывать положения рук с использованием прямой кинематики, которую затем можно записывать и воспроизводить. Системная сводка секция позволяет наблюдать за показаниями потенциометр и энкодер и рассчитанными текущими положениями плеча, локтя и запястья для диагностики любых проблем калибровки; UI кнопки позволяют двигателям робота быть включенными или отключенными на уровне оборудования для обеспечения максимальной безопасности.
Основное назначение пользовательского интерфейса для передачи команд высокого уровня, которые говорят роботу двигаться. Существует несколько способов для управления:
1) Повтор предварительно записанных или генерируемых данных,
Данные, которые были записаны или генерируются из внешнего источника, сохраненного в формате .CSV, содержащие данные о нужном положении руки, локтя и плеча могут быть воспроизведены детерминированным способом на частоте 1 кГц либо фильтрованной или нефильтрованной. Это работает, даже если данные были записаны с людьми различных размеров конечностей, так как данные предварительно обрабатываются с помощью математической модели руки человека. Интегрированные инструменты позволяют выполнять масштабирование, обрезку и сдвиг данных вокруг рабочей области. Примеры случаев использования в тестировании реабилитационного устройства могут быть:
* Воспроизведение данных, которые были записаны ALANArm в пассивном режиме, для оценки того, как реабилитационное устройство может действовать, в частности, рукой позиции.
* Воспроизведение реальных данных пациента, чтобы проверить, может ли реабилитационное устройство точно фиксировать движение конечности с его собственной сенсорной системой.
* Воспроизведение сгенерированных движений, такие как частоты развертка в определенных осях для оценки динамических характеристик реабилитационного устройства.
2) Управление курсором
Положением руки можно непосредственно манипулировать с помощью пользовательского интерфейса благодаря курсору мыши ПК, с помощью интерполяции и фильтрации, чтобы увеличить точность движения. Правильное положение локтя, запястья и плеча автоматически создается путем решения математической модели руки. Это позволяет исследователю безопасно играть в игры или деятельности реабилитационного устройства, только взаимодействуя с пользовательским интерфейсом системы ALAN-Arm.
3) Устройство управления пассивной реабилитации
Прецедент - это способ, похожий на управление курсором, но позволяющий исследователям контролировать положение рук ALAN-Arm, используя другое устройство. Желаемое положение рук передается по локальной сети в ALAN-Arm. В потенциальном сценарии будет исследователь, держащий реабилитационное устройство (на котором был отключен источник питания), с ALAN-Arm держит идентичное (полностью активное) реабилитационное устройство. Это позволяет ALAN-Arm иметь прямой контроль над устройством активной реабилитации, в то время как исследователь взаимодействует с пассивной версией, предлагающей безопасный метод удаленной диагностики потенциальных проблем.
4) Автономная игра
Этот режим позволяет ALAN-Arm использовать реабилитационное устройство без помощи человека (рис 3) Игра или действие, выполняемое на реабилитационном устройстве, может быть запрограммировано на отправку и получение простых сообщений по TCP / UDP в систему ALAN-Arm.. Это может быть использовано для тестирования программного обеспечения и оборудования в течение длительных периодов времени, что помогает выявить редкие ошибки и утечку памяти в программном обеспечении реабилитационного устройства, например, или проверить надежность аппаратной части системы. Данные, передаваемые между системой ALAN-Arm и реабилитационным устройством включает в себя:
* Rehab устройство ALAN-Arm - конечное положение руки. Это говорит ALAN-Arm, где она должна двигаться, чтобы завершить задачу.
* • ALAN-Arm для реабилитации устройства - текущее положение руки, запястья, локтя и плеча. Это позволяет игре отображать положение руки и руки игрока и управлять игровой логикой.
Эти четыре входных режима делают ALAN-Arm полезной в различных сферах. В любом режиме ALAN-Arm может войти в текущее положение с частотой до 1 кГц, которые затем могут быть сохранены на компьютере. Модульная архитектура программного обеспечения системы позволяет другим методам ввода быть потенциально добавленными в будущем.
![Рисунок 3 - ALAN-Arm играет в игру на роботизированном реабилитационном устройстве 2DOF (разрабатываемая версия hCAAR [13] система)](images/3.jpg)
"Рисунок 3 - ALAN-Arm играет в игру на роботизированном реабилитационном устройстве 2DOF (разрабатываемая версия hCAAR [13] система)"
IV ТЕСТИРОВАНИЕ И ОЦЕНКА
Три испытания были проведены для оценки ALAN-Arm, чтобы определить, насколько хорошо он может воссоздать движение. Критерии, используемые для оценки эффективности ALAN-Arm, является его способность воссоздать пути движения, и его частотная характеристика.
1) Путь точности отдыха
Способность двигаться точно имеет важное значение, поскольку это позволяет реабилитационным устройствам быть протестированными с использованием правдоподобных или сгенерированные модели движения с высокой воспроизводимостью. Это было оценено путем генерирования пентаграммы образного пути с постоянной скоростью 3 см / с, и использовать его в качестве входного файла для ALAN-Arm. Устройство держало ручку системы плоской реабилитации и выполняло движение пути, и текущее положение руки было выведено с использованием прямой кинематики ALAN-Arm в (FK). Система захвата движения Optotrak Certus также использовалась в качестве внешней меры положения руки. Были рассчитаны среднее и стандартное отклонение пространственной ошибки между траекторией спроса и предполагаемой позицией FK и измеренной позицией Optotrak. Использование этих двух различных методов облегчает расшифровку причин любых неточностей. Так как Оптотрак и ALAN-Arm используются разные системы координат, метод (жесткой) регистрация набора точек [14] была использована для перевода и поворота (но не масштабировать, растянуть или наклонить) измеренного пути к той же системе координат, что и сигнал спроса.
2) Частотный отклик
Точность ALAN-Arm также может изменяться со скоростью; был проведен тест, который включал воспроизведение нескольких сгенерированных дорожек круглой формы диаметром 15 см, каждый из 0,1 до 1 оборота в секунду (Гц). Это соответствует синусоидальным входам в х и у осей в диапазоне частот. Optotrak был использован для измерения положения рук. Отставание усиления и фаз были рассчитано для каждой тестируемой частоты с помощью быстрого преобразования Фурье MATLAB преобразует функцию (FFT). предполагаемой позицией FK и Optotrak измеренного положением. Использование этих двух различных методов облегчает расшифровку причин любых неточностей.
3) Производительность метрики сохранение
Траектория пентаграммы также использовалась во время предыдущего клиническое испытание для оценки эффективности работы пациента [6]. Траектория движения пациента при попытке отследить форму были записаны как часть этого исследования, и ключевые показатели эффективности, такие как средняя длина пути компонента (PL) и плавность, измерены с использованием нормализованного рывка (Нью-Джерси). Эти ключевые показатели были зарегистрированы в течение периода испытания, чтобы указывают на изменения в движении пациента. Данные для одного конкретного пациента в этом испытании был выбран и траектории движения состоящая из 31 компонента была «воспроизведена» через ALAN-Arm и движение руки было записано с помощью Optotrak чтобы оценить его способность сохранять характеристику движение.
V. РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
Рисунок 5 показывает, насколько точно ALAN-Arm может воссоздать звездообразный рисунок. Низкая ошибка, измеренная форвардом кинематика подразумевает неизменно высокую точность по всему рабочая среда. Тем не менее, большое расхождение в среднем и максимальная погрешность, измеренная прямой кинематикой, и внешняя измерительная система Optotrak (таблица 1) подразумевает программное обеспечение и управление работает как задумано, но вперед модель кинематики не точно представляет систему. Метод прямой кинематики Денавита-Хартенберга требует, чтобы физические параметры каждой ссылки в роботе были жестко и точно измерено. Вероятная причина относительно большой ошибки, измеряемой Optotrak, является использование энкодеров в двигателях для измерения углов. Это означает, что любое движение вне двигателей (люфт в передачах, эластичность в суставах) не сможет быть измерена. Поскольку контроллеры работают исключительно в стыковочных уголках, у них нет способа исправления любых ошибок в декартовом пространстве. Можно ввести улучшения, чтобы измерительная система могла повысить точность в будущем, например, датчик слияния с внешней камерой. Тем не менее, тест показал максимальную погрешность измерения у Optotrak было 14мм. Это может быть приемлемым уровнем точности при использовании для тестирования реабилитационных роботов в течение длительных периодов.
Вторая оценка была сделана путем создания круговой траектории движения спроса в диапазоне скоростей. Участок Боде (Рисунок 4) и примерные следы движения (Рисунок 7) показывают, как движение сильно усиливается на более высоких частотах, особенно по оси Y, предполагая, что система приближается к естественной частоте. Ось у, представляет движение вперед и назад и поэтому более крупные движения в оси у может быть связано с большой движущейся массы рычага, с обоими проксимальных и дистальных секций в движении.
Движение Whiles из стороны в сторону (ось X) приводит в основном к вращению дистальной части вокруг локтя и, следовательно, ниже движущаяся масса. Эти различия в основном объясняют разницу в производительности по осям X и Y.
В то время как более высокие частоты создают больший потенциал ошибки, эти высокочастотные движения, вероятно, будут используется в длительном стресс-тестировании, в этом случае точность меньше важный. На низких средних частотах усиление остается относительно низким в обеих осях. В этом тесте частоты должны быть представителем скоростей движений, которые пациент может перенести на производительность (например, 0,5 Гц = в среднем 150 мм / с).
Оценка сохранения показателя эффективности выполняется путем воспроизведения 31 последовательного движения компонентов испытания пациента и расчета длины пути и нормализованного рывка (рисунок 7) как для входной, так и для измеренной траектории. Обе записанные траектории, используемые в качестве входа для ALAN-Arm, и выходные данные Optotrak показывают аналогичные тенденции, так как система сохраняет характеристики движения пациента. Тем не менее, на протяжении 31 движения, меньшая длина пути, представляющая более прямую точку движения и более плавные движения, приводящие к снижению зафиксированного нормализованного рывка. В общем, эти результаты подразумевают, что ALAN-Arm имеет тенденцию производить более длинные пути и чуть менее резкие движения по сравнению с пациентом. Лучшая оптимизация параметров управления ожидается в дальнейшем чтобы улучшить эти сравнения.
VI. ЗАКЛЮЧЕНИЕ
Целью проекта ALAN-Arm было оценить возможность использования системы роботов-гуманоидов для тестирования роботизированные реабилитационных устройств. Необходимость реабилитационных проверяемых устройства важна из-за их высокой сложность. Дизайн, представленный здесь, учитывает диапазон необходимого для выполнениея тестирования, включая воспроизведение сгенерированной дорожки движения, долгосрочное автоматическое тестирование, играя в реабилитационные игры или мероприятия, или ручное управление с помощью пользовательского интерфейса или другого устройства. Тестирование устройства показало, что ALAN-Arm воссоздала генерируемые движения с максимальная погрешность 14 мм, симуляция тестирования пациента показала потенциал ALAN-Arm в воспроизводстве движения, типичное для пациентов. Будущие улучшения будут включать возможность измерить интерфейсную силу между рукой и роботом реабилитационного устройства.
СПИСОК ЛИТЕРАТУРЫ
[1] Stroke Association, “State of the Nation: stroke statistics,” January 2016. [Online]. Available: https://www.stroke.org.uk/...[Accessed 21 March 2016].
[2] N. Hogan, H. I. Krebs, J. Charnnarong, P. Srikrishna and A. Sharon, “MIT - MANUS : A Workstation for Manual Therapy and Training,” in IEEE International Workshop on Robot and Human Communication, 1992.
[3] P. S. Lum, C. G. Burgar, P. C. Shor, M. Majmundar and M. Van der Loos, “Robot-assisted movement training compared with conventional therapy techniques for the rehabilitation of upper-limb motor function after stroke,” Archives of Physical Medicine and Rehabilitation, vol. 83, no. 7, pp. 952-959, 2002.
[4] T. Nef and R. Riener, “ARMin-Design of a novel arm rehabilitation robot,” in International Conference on Rehabilitation Robotics, 2005.
[5] P. R. Culmer, A. E. Jackson, J. Savage, M. C. Levesley, R. Richardson, J. A. W. M. Cozens and B.B. Bhakta, “From Single to Dual Robotic Therapy: A Review of the Development Process of iPAM,” in The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, 2006.
[6] R. Sigrist, G. Rauter, R. Riener and P. Wolf, “Augmented visual, auditory, haptic, and multimodal feedback in motor learning: A review,” Psychonomic Bulletin & Review, vol. 20, no. 1, pp. 21-53, 2013.
[7] S. Roderick and C. Carignan, Designing Safety-Critical Rehabilitation Robots, INTECH Open Access Publisher, 2007.
[8] G. R. B. E. Romer and H. J. A. Stuyt, “Compiling a Medical Device File and a Proposal for an International Standard for Rehabilitation Robots,” in International Conference on Rehabilitation Robotics, 2007.
[9] J. Guiochet, Q. A. D. Hoang, M. Ka?aniche and D.Powell, “Applying Existing Standards to a Medical Rehabilitation Robot: Limits and Challenges,” in IROS Intelligent Robots and Systems, 2012.
[10] B. Alexander and K. Viktor, “Proportions of Hand Segments,” International Journal of Morphology, vol.3, no. 28, pp. 755-758, 2010.
[11] J. S. Kelso, D. L. Southard and D. Goodman., “On the nature of human interlimb coordination,” Science, vol. 203, no. 4384, pp. 1029-1031, 1979.
[12] N. Hogan, “An organizing principle for a class of voluntary movements,” Journal of Neuroscience, vol. 4, no. 11, pp. 2745-2754, 1984.
[13] “Sivan M; Gallagher J; Makower S; Keeling D; Bhakta B; O'Connor RJ; Levesley M Home-based Computer Assisted Arm Rehabilitation (hCAAR) robotic device for upper limb exercise after stroke: results of a feasibility study in home setting,” Journal of neuroengineering and rehabilitation, vol. 11, no. 1, p. 163, 2014.
[14] A. Myronenko and X. Song, “Point Set Registration: Coherent Point Drift,” IEEE Trans. on Pattern Analysis and Machine Intelligence, vol. 32, no. 12, pp. 2262-2275, 2010.