Человеческая рука – один из самых сложных и совершенных элементов человеческого тела, который участвует в информационных и исполнительных процессах, обеспечивающих жизнедеятельность человека. В частности, рука используется для захвата объектов, пальцы руки используются для тактильного определения материала, из которого сделан объект. Руки человека могут в подавляющем большинстве приспосабливаться к объектам практически любой формы для того, чтобы выполнить захват. Это обеспечивается за счет сложного взаимодействия суставов и системы мышечных связей суставов и кистей рук. Поэтому, одна из главных задач, которая ставится перед разработчиками робототехнических систем на базе человекоподобных роботов состоит в создании роботизированных систем с автономными и развитыми навыками мелкой моторики рук. Эффективные навыки манипулирования персональными и служебными роботами в неструктурированных средах имеют фундаментальное значение для выполнения манипуляционных задач и для обеспечения надлежащего и безопасного сотрудничества между людьми и роботами.
Основная цель настоящей работы состояла в разработке математической модели руки антропоморфного робота, которая фактически может быть разделена на две подмодели: модель локтевого и плечевого суставов и модель кисти. В качестве прототипа авторами использован антропоморфный робот модели SAR-400. Фрагменты руки-манипулятора этого робота приведены на рис. 1.
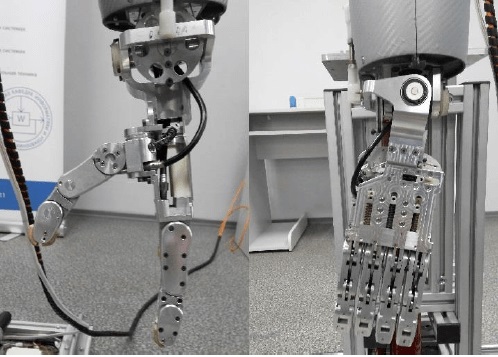
Рис. 1. – Фрагмент руки-манипулятора робота SAR-400
Управление кистью осуществляется при помощи 7 двигателей: 2 двигателя отвечают за вращение самой кисти, 2 двигателя – за вращение большого пальца, и 3 двигателя отвечают за вращение оставшихся четырех пальцев. У данной модели робота мизинец и безымянный палец управляются одним двигателем, следовательно, углы поворота у них одинаковые. Также необходимо отметить, что несмотря на то, что пальцы робота состоят из трех звеньев, управлять каждым из звеньев по отдельности не является возможным из-законструкции робота. Для управления кистью используются углы поворота двигателей. В табл. 1 приведены диапазоны значений углов поворота для каждого из двигателей.
Таблица 1. Описание двигателей кисти робота.
| Название двигателя | Описание | Минимальный угол, град. | Максимальный угол, град. |
| WristS | Вращение кисти вдоль оси OX | -15 | 15 |
| WristF | Вращение кисти вдоль оси OY | -15 | 15 |
| Finger.ThumbS | Вращение большого пальца относительно кисти | -90 | 10 |
| Finger.Thumb | Сжимание/разжимание большого пальца | 10 | 75 |
| Finger.Ring | Сжимание/разжимание ми-зинца и безымянного пальца | 12 | 80 |
| Finger.Middle | Сжимание/разжимание среднего пальца | 12 | 80 |
| Finger.Index | Сжимание/разжимание указательного пальца | 12 | 80 |
При моделировании прямой кинематики кисти был использован поход Денавита–Хартенберга, который наиболее часто используется для подобных задач. Его суть заключается в последовательном построении систем координат, связанных с каждым звеном кинематической цепи. Смысл подхода Денавита–Хартенберга состоит в формировании однородной матрицы преобразования, имеющей размерность 4х4 и описывающей положение системы координат каждого звена относительно предыдущего звена. Это дает возможность последовательно преобразовать координаты манипулятора из системы отсчета, связанной с последним звено, в базовую систему отсчёта, являющейся инерциальной системой координат для рассматриваемой системы [1]. Так как данный подход рассматривает только лишь одну конечную точку в пространстве, то для построения модели кисти руки его необходимо применить для каждого из пальцев. Пальцы робота (кроме большого) имеют идентичную структуру, поэтому системы координат имеют одинаковый вид, отличия будут заключаться лишь в некоторых параметрах. Оси для каждого из соединений представлены на рис. 2.
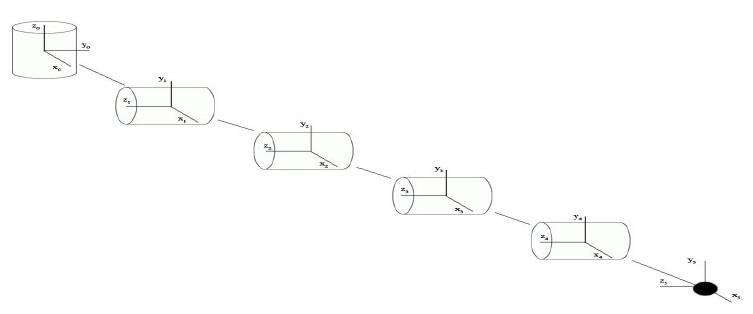
Рис. 2. – Представление осей для Д-Х подхода
Для получения модели составляется таблица параметров для построения матриц преобразования. Данные, которые заданы в этой таблице числами являются константами и одинаковы для каждого из пальцев (кроме большого). Данные, которые имеют буквенное обозначение – переменные. Параметр d2 имеет постоянное значение, однако оно различно для каждого из пальцев и показывает на сколько смещена ось пальца относительно центра руки. Соответствующие числовые параметры для матриц представлены в табл. 2.
Таблица 2. Описание двигателей кисти робота.
| № узла | d, м | r, м | ?, град. | ?, град.. |
| 1 | 0 | 0 | ?1 | 90 |
| 2 | d2 | 0.155 | ?2 | 0 |
| 3 | 0 | 0.038 | ?3 | 0 |
| 4 | 0 | 0.028 | ?4 | 0 |
| 5 | 0 | 0.022 | ?5 | 0 |
Далее, строится матрица преобразования для каждого из узлов, которая будет иметь вид:

Полученные матрицы преобразований необходимо перемножить, в результате чего будет получена итоговая матрица перехода к исходным координатам:

В рамках рассматриваемой задачи из представленной матрицы используется только четвертый столбец, значения этого столбца описывают положение точки в пространстве, в свою очередь первые три столбца описывают ориентацию в пространстве.
Описанный подход был использован для построения модели руки антропоморфного робота в пространстве. Для реализации использовался пакет Matlab, результаты моделирования приведены на рис. 3, 4.
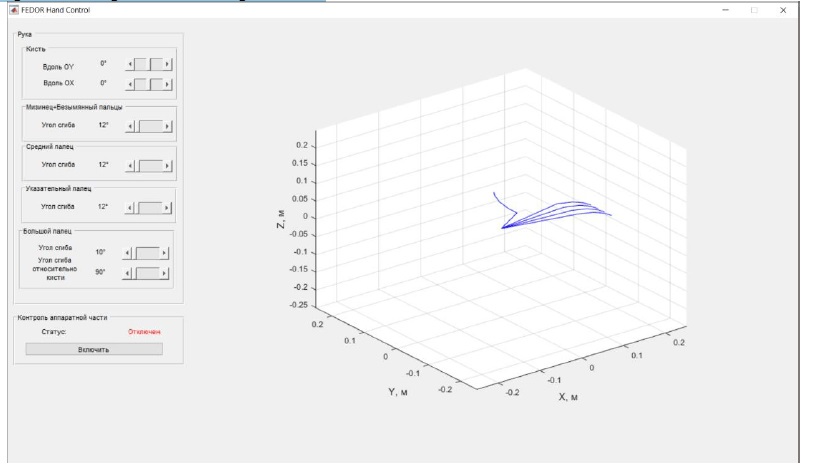
Рис. 3. – Положение кисти при минимальных допустимых параметрах
В результате моделирования получено пять матриц, хранящих положение и ориентацию концов пальцев в пространстве. Для более удобного представления был разработан пользовательский интерфейс, который обрабатывает текущее заданное значение углов и изображает положение пальцев в 3D пространстве.
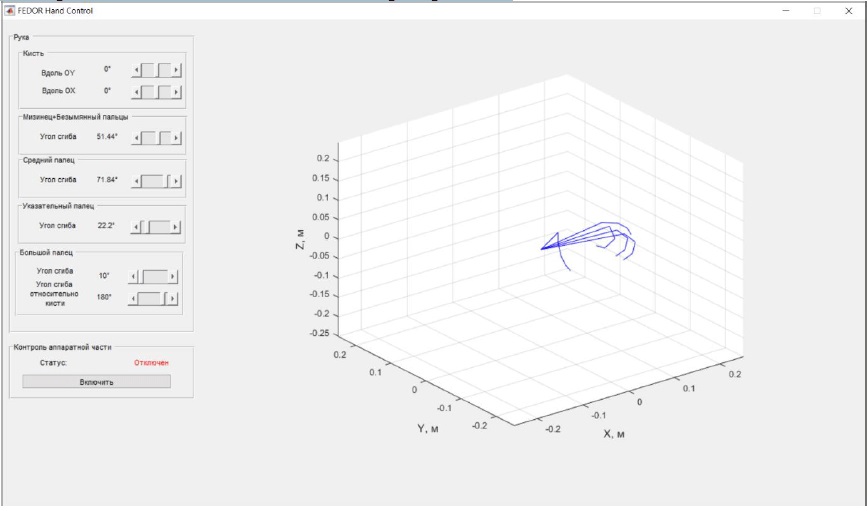
Рис. 4. – Положение кисти при произвольных параметрах
Аналогичный подход [2-3] был применен и для получения математической модели, описывающей динамику локтевого и плечевого суставов робота SAК-400. Соответствующие блоки робота приведены на рис. 5.

Рис. 5. – Общий вид предплечья робота SAR-400
Результаты моделирования двухзвенного манипулятора приведены на рис. 6.
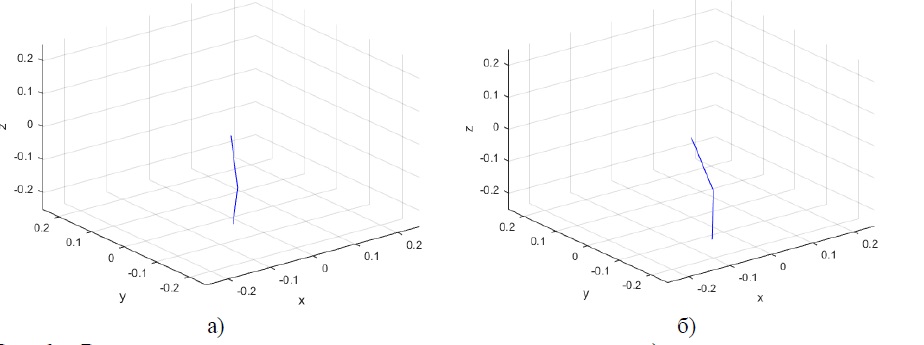
Рис. 6. – Результаты моделирования двухзвенного манипулятора: а) – положение предплечья при минимальных допустимых параметрах; б) – положение предплечья при произвольных параметрах
Дальнейшие исследования в рамках рассмотренного направления будут направлены на доработку математической модели для решения задач, связанных с тонкой моторикой манипуляторов. Также планируется разработка специализированной библиотеки функций для управления манипулятором робота SAR-400 в реальном масштабе времени.
СПИСОК ЛИТЕРАТУРЫ
1.Зенкевич С.Л., Ющенко А.С. Управление роботами. Основы управления манипу-ляционными роботами - М.: Изд-во МГТУ им. Н. Э. Баумана, 2000. - 400 с.
2. Лутманов С.В., Куксенок Л.В., Попова Е.С. Задачи управления двухзвенным мани-пулятором с вращательными кинематическими парами // Фундаментальные иссле-дования. – 2013. – № 6-4. – С. 886-891.
3. Робототехника и гибкие автоматизированные производства робототехнических си-стем и гибких автоматизированных производств / С.В. Пантюшин, В.М. Назаретов, О.А.Тягунов и др.; Под ред. И.М. Макарова. М.: Высш. Шк., 1986 – 175 с.