В текущий момент существует множество разных видов антропоморфных манипуляторов. У каждого манипулятора есть свои плюсы и минусы.
OpenBionics – это Open-Source-инициатива по разработке доступных, легких и модульных рук для роботов и протезов, которые могут быть легко воспроизведены при помощи доступных материалов. Их особенностью является тот факт, что все корпусные детали можно отпечатать на 3d принтере. Рука обладает пятью степенями свободы. Управляются с помощью шаговых двигателей и тросов.
Touch Bionics достигла исключительного совершенства в разработке и производстве биоэлектрических систем для протезирования верхних конечностей. Отличаются большим числом степеней свободы (7 степеней свободы). Управляется с помощью специализированных двигателей.
InMoov - открытый проект по изготовлению робо-руки на 3D-принтере. Рука имеет 6 степеней свободы, но при этом использование кисти ухудшается управление пальцами. Управляется серводвигателями.
Bebionic рука-протез, созданная для возможности совершать ампутированными конечностями ежедневные дела, которые трудоспособные люди могут принимать как должное. Отличается от остальных рук 12 степенями свободы и большим функционалом.
Протез DEKA Arm System, выполненный из легкого и прочного сплава, максимально точно повторяет форму человеческой руки. «рука» может распознавать до 10 различных движений и имеет тот же размер и вес, что и обычная человеческая рука. Имеет 6 степеней свободы, двигатели постоянного тока и датчики положения.
В настоящей работе рассматривается управление антропоморфным манипулятора InMoov на основе биосигналов человека, в частности, электрической активности мышц. Существует тенденция повышения интеллектуальности манипуляторов за счет использования систем распознавания изображений , систем анализа одно- и многомерных сигналов от датчиков, измеряющих ориентацию и положение в пространстве органов управления или непосредственно фиксирующих биосигналы человека-оператора робота.
Чтобы управлять шестью серводвигателями, соответствующими степеням свободы манипулятора используется информация от датчика, снимающего электромиограмму мышц оператора по трехэлектродной схеме. Схема внешних соединений системы управления приведена на рис. 1. Одна плата Arduino UNO снимает EMG сигнал с мышцы. Этот сигнал обрабатывается и передается на другую плату Arduino UNO, которая отвечает за управление сервоприводами.
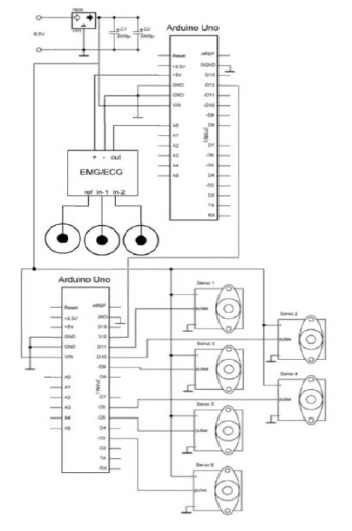
Рис. 1. Схема внешних соединений системы управления антропоморфным манипулятором с помощью датчика EMG
Первый контроллер создает массив нулей, в дальнейшем считывает аналоговый вход с инструментального усилителя. Сигнал преобразовывается из 10 бит в 8 бит и проверяется прохождение порогового уровня. Если сигнал выше порогового- то сигнал с платы отправляется на второй контроллер рис.3, который при считывании единичного входного сигнала отправляет управляющее воздействие на приводы (рис. 2).

Рис. 2. Блок-схема алгоритма управления серводвигателями манипулятора
Задачей алгоритма считывания является сбор массива данных с аналогового датчика, нахождения максимумов и минимумов этого сигнала, нахождение его амплитуды и нахождение преодоления порогового значения для срабатывания триггера (см. рис. 3).
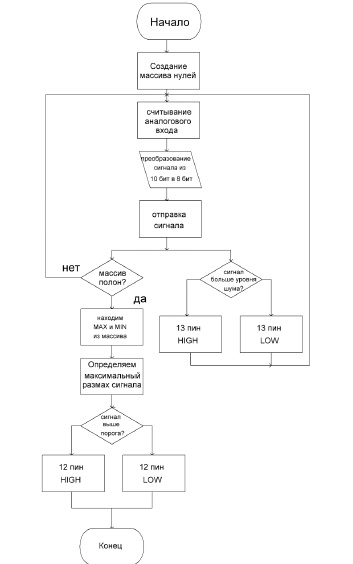
Рис 3. Блок-схема работы датчика EMG
Результатом работы EMG датчика являются показания, представленные на рис 4-7. Для анализа сигнала используется частотный спектр, который преобразовывается с помощью быстрого Фурье-преобразования. Это позволяет убрать зашумленный сигнал, находящийся в диапазоне до 8 Гц. Форма сигнала позволит различать сигналы от разных пальцев. Так на рис. 6 приведены показания снятые с указательного, среднего, безымянного и мизинца. Программа может по их форме понять, какой палец в данный момент времени был сжат и выполнить определенную операцию, которая будет присуща данному пальцу, что позволит увеличить функционал устройства. Сигнал снятый с бицепса показан на рис. 4. Он отличается по амплитуде и характеру сигнала от сигнала, снятого с пальцев (см. рис 6) и кисти (рис. 5).
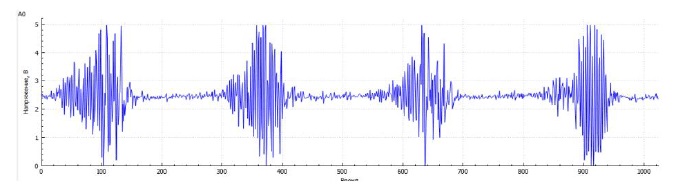
Рис. 4. Электромиограмма сокращений мышц бицепса
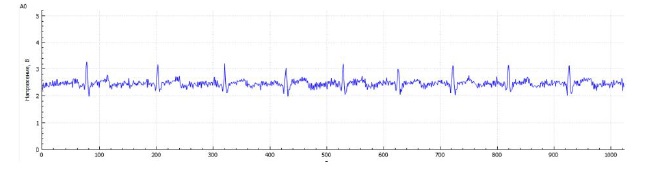
Рис. 5. Электромиограмма при сгибании/разгибании кисти
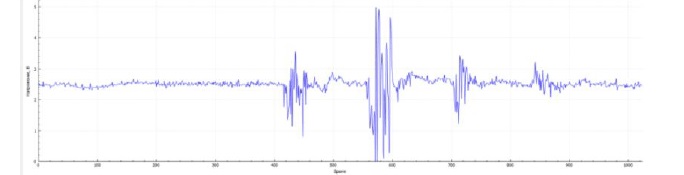
Рис. 6. Вид электромиограммы при сгибании указательного, среднего, безымянного пальца и мизинца
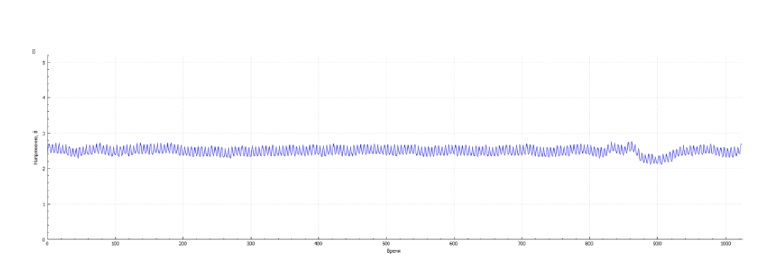
Рис. 7. Режим простоя
Снятие биосигнала с руки является довольно сложной задачей, требующей различные преобразования, отсекания шумов и правильной установки датчиков на руку. Сложно обработать ложный и полезный сигналы. Для этого используются новые алгоритмы, которые учитывают входной сигнал по его ширине, амплитуде и многим другим факторам.
Библиографический список
1. OpenBionics антропоморфный протез руки под управлением Arduino, 2016 [Электронный ресурс].
2. Touch Bionics i-Limb Based on the i-limb™ ultra, the i-limb™ revolution is an externally powered, multi-articulating prosthetic hand offering Passive MIT, Boston, USA, 2015, pp 13-17.
3. InMoov, 2015 [Электронный ресурс]. http://inmoov.fr/
4. Bebionic The world’s most lifelike bionic hand, 2017 [Электронный ресурс]. http://bebionic.com/
5. Искусственная рука, обладающая такой же подвижностью, что и настоящая, 2016 [Электронный ресурс]. http://www.qwrt.ru/...
6. Юдин Д.А., Дергалев Т.С. Разработка интеллектуальной робототехнической системы с техническим зрением для игры в шахматы [Электронный ресурс] // Международная конференция «Актуальные проблемы робототехники и автоматики». Белгород, 2015. С. 57-62.