Аннотация
Максименко В.Л., Иванов А.Ю. Исследование автоколебаний при моделировании гармонического осциллятора с использованием комплексов моделирования. Представлены результаты разработки и исследования конструкции «локтевого» узла антропоморфного робота с малыми массогабаритными характеристиками. Модуль построен с учетом требований, предъявляемых к роботам, предназначенным для применения на космических станциях. Обеспечена компактность конструкции модуля с двумя степенями свободы – поворот звена и его ротацию. Выполненные исследованияопределили рациональный диапазон кинематических характеристик модуля..
Общая постановка проблемы
Создание антропоморфного робота, способного выполнять полетные задания, сопряжено с необходиvостью решения ряда задач, обусловленных спецификой его использования . В первую очередь это снижение массы и габаритов. Общая структурная схема антропоморфного робота и основные параметры его звеньев были определены и апробированы при имитации выполнения ряда полетных заданий [2]. При этом было установлено, что конструкция модуля«локтевого» узла, обеспечивающего поворот и ротацию, должна быть существенно уменьшена в поперечных размерах. Для выполнения данного требования была разработана новая компоновочная схема приводов, в основе которой принято соосное расположение оси двигателя и выходного звена по каждойстепени свободы (см. рисунок)
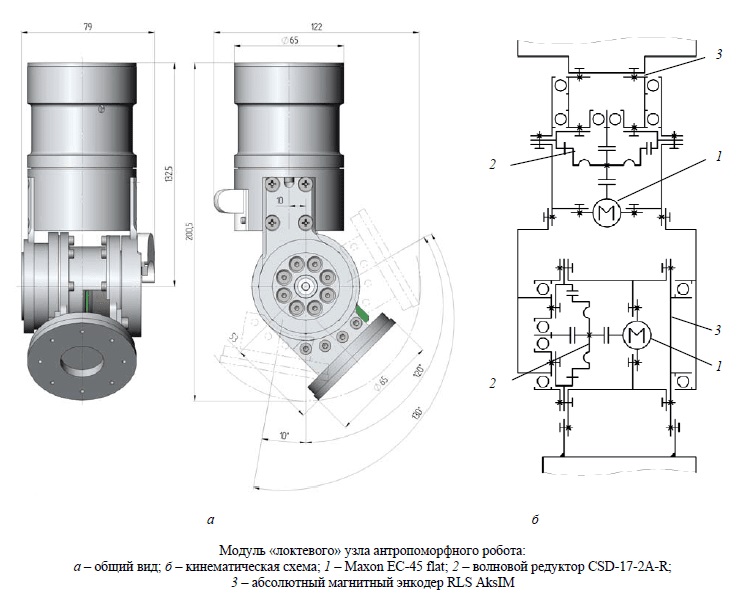
В качестве требуемых к исполнению параметров были приняты следующие исходные данные: угол поворота от 0° до +150°, угол ротации от –90° до +45°, скорость поворота до 1,5 с–1, скорость ротации до 1 с–1, масса внешней нагрузки 5 кг, вылет центра тяжести внешней нагрузки от оси поворота 0,35 м. Кинематические параметры разрабатываемого варианта модуля были приняты исходя из положения его принадлежности к антропоморфному манипулятору, и, следовательно, они аналогичны соответствующим параметрам руки человека [3].
При расчете приведенных нагрузок учитывалось одновременное движение по каждой степени подвижности. С учетом кратковременности действия пусковых нагрузок были приняты к использованию: электродвигатели Maxon EC-45 flat с номинальной мощностью 50 Вт и рабочим напряжением 24 В и волновые редукторы CSD-17-2A-R с передаточным числом, равным 100. Управление двигателями осуществлялось специальными моторными драйверами.
Все элементы конструкции были изготовлены издюралюминиевого сплава Д16Т.
В результате проведенных исследований было установлено, что при симметричном графике разгона и торможения в заданных пределах углов поворота достичь исходных скоростей по каждой свободе не удается. Максимальные зарегистрированные скорости составили: поворот – 0,72 с–1, ротация 0,27 с–1. При увеличении части угла поворота, соответствующего периоду разгона, существенно возрастают динамические нагрузки на все элементы привода и крепления,что приводит к их поломке.
Используемые электродвигатели обеспечили стабильное положение в режиме позиционирования со статической нагрузкой 8 кг в течение 1 минуты. Контроль текущего положения производился абсолютным магнитным энкодером RLS AksIM (12 бит, 4000 точек/360°).
Принятая кинематическая схема с соосным расположением входного и выходного звеньев привода обеспечила минимально возможное число элементов в системе передачи движения. При этом редуцирование обеспечивается только одним волновым редуктором. Как следствие – привод по каждой степени подвижности обладает повышенной жесткостью. Практически точность отработки заданных углов поворота определялась упругими деформациями соединения «редуктор–выходное звено» и зазорами в подшипниках. В совокупности с контролем задаваемого положения магнитным энкодером повторная точность позиционирования составила 0,06 мм.
Анализ результатов исследования подтвердил перспективность построения схемы привода с соосным положением входного и входного вала. Вместе с тем данная схема требует дальнейшего совершенствования. Необходимо оснащение нормально замкнутымустройством фиксации относительного положения звеньев. Кроме того, в системе управления приводами следует предусмотреть режим упругого демпфирования, что позволит снизить динамические нагрузки в режиме позиционирования при незначительном увeличении времени успокоения колебаний.
Список использованной литературы
1. Богданов А. А., Кутлубаев И. М., Сычков В. Б.Перспективы создания антропоморфных робототехнических систем для работы в космосе //Пилотируемые полеты в космос. 2012. № 1(3).С. 78–84. 2. Жиденко И. Г., Богданов А. А., Кутлубаев И. М,Сычков В. Б. Обоснование выбора структурной схемы роботов космического исполнения // Решетневские чтения: материалы XVII Междунар. науч. конф.(12–14 нояб. 2013, г. Красноярск) : в 2 ч. / под общ. ред. Ю. Ю. Логинова ; СибГАУ. Красноярск, 2013.Ч. 1. С. 278–280. 3. Жиденко И. Г., Кутлубаев И. М. Методика определения сигналов управления антропоморфным манипулятором // Мехатроника, автоматизация, управление. 2014. № 5. С. 41–46.