
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Математическое моделирование импульсного преобразователя повышающего типа
- 4. Требования, предъявляемые для системы управления повышающим импульсным преобразователем
- 5. Описание аппаратного модуля ШИМ микроконтроллера STM32F4
- 6. Планируемые исследования
- Список источников
Введение
В работе обосновывается возможность применения широтно–импульсной модуляции для управления повышающим импульсным преобразователем при разных нагрузках. Данный тип преобразователей характеризуется нелинейной регулировочной характеристикой, что затрудняет использование ШИМ для него.
1. Актуальность темы
Повышающий импульсный преобразователь (ИП) используется в солнечных электростанциях и электромобилях. Этот факт основывается на том, что ток, потребляемый от источника постоянного тока (аккумуляторная или солнечная батарея), является непрерывным. В сравнении с импульсным током источника потери меньше, кроме того вольтамперная характеристика солнечной панели по сути не дает возможности создания режима потребления максимальной мощности. Также такой источник характеризуется пониженным значением напряжения, которое изменяется в процессе работы.
Поэтому задача проектирования системы управления для данных применений на базе аппаратного модуля ШИМ современных микроконтроллеров является актуальной задачей. В данной работе рассматривается только работа импульсного преобразователя на активное сопротивление.
2. Цель и задачи исследования
Целью магистерской работы является разработка системы управления повышающим импульсным преобразователем, работающим на разные типы нагрузки.
Основные задачи исследования:
- Математическое моделирование импульсного преобразователя повышающего типа.
- Обзор существующих методов управления повышающим импульсным преобразователем.
- Описание аппаратного модуля ШИМ микроконтроллера STM32F4.
- Разработка системы управления повышающим импульсным.
3. Математическое моделирование импульсного преобразователя повышающего типа
Работа схемы (рис.3.1) основывается на накапливании энергии дросселя L при подключении к источнику с последующей ее отдачей в нагрузку. Для сглаживания пульсаций напряжения на нагрузке Rн параллельно ей подключен конденсатор С. Схема также состоит из транзистора VT и диода VD. Напряжение управления uУПР определяет длительность открытого состояния ключа tВКЛ при периоде переключения Т [1–2].
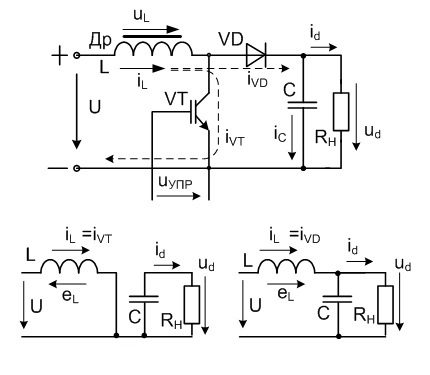
Рисунок 3.1 – Принципиальная схема силовых цепей импульсного преобразователя повышающего типа
Для анализа используем схему замещения (рис.3.2) для двух возможных состояний цепей ИП за период коммутации (Tк) ключа VT1.

Рисунок 3.2 – Схема замещения повышающего ИП а)VT – открыт; б)VT – закрыт.
На рис. 3.2 сопротивление цепи RΣ характеризует общее падение напряжения и состоит из внутреннего сопротивления источника, соединительных проводов, активного сопротивления дросселя и сопротивления одного из приборов в открытом состоянии. А активное сопротивление Rн характеризует эквивалентную нагрузку (АИН–АД), с учетом того, что АИН потребляет активную мощность от источника питания.
Уравнения, описывающие работу ИП:

где:
- iL, iVD, iС – соответственно мгновенные значения тока источника питания, тока через диод VD1, емкостного тока;
- uL, ud, uАВ – соответственно мгновенные значения напряжений на дросселе, выходного напряжения ИП, на транзисторе VT1.
Причем некоторые параметры схемы не являются непрерывными и изменяют свои значения в зависимости от состояния ключа VT1:
- VT1 – открыт: uАВ=0; iVD=0;
- VT1 – закрыт: uАВ= ud; iVD=iL.
В соответствии с этим можно определить мгновенные значения uL и iVD за период коммутации Тк:
где:
- tвкл, tвыкл – логический сигнал, принимающий значение
1
на интервале времени соответствующем включенному (выключенному) состояниям VT1.
Для составления усредненной модели, можно воспользоваться определением среднего значения величины за период ШИМ:
где:
- TШИМ – период ШИМ.
Проверка адекватности моделей для мгновенных значений (Instantaneous model) и для средних значений (average model) была использована имитационная модель в МАТЛАБ собранная при помощи библиотеки powersystem (matlab powersystem model).
Общий вид модели приведен на рисунке 3.3.

Рисунок 3.3 – Общий вид МАТЛАБ–модели проверки адекватности
При моделировании использовались следующие пераметры: E=4 В, L=1 мГн, С=1 мФ, R=5 Ом, RΣ=0.101 Ом, TШИМ=0.1 мс, γ=0.75 (скважность ШИМ), период дискретности модели 2 мкс.
На рисунке 3.4 показаны диаграммы работы трех моделей в МАТЛАБ. На них видно, что сходимость находится в пределах 5 %. Однако погрешность обусловлена неточностью генератора ШИМ, который имеет период 0.1 мс, и в период ШИМ укладывается только 50 точек. Уменьшив период дискретности до 0.2 мкс можно получить 500 точек за период ШИМ. Результаты работы модели приводятся на рисунке 3.5.
Увеличенные интервалы работы повышающего импульсного преобразователя в переходном и установившемся режимах работы приведены на рисунке 3.6. Откуда видно, что сходимость моделей в переходных режимах отстает на один шаг дискретности, а в установившемся режиме погрешность отсутствует.
При этом модель мгновенных величин также практически сходится с имитационной моделью (powersystem model).
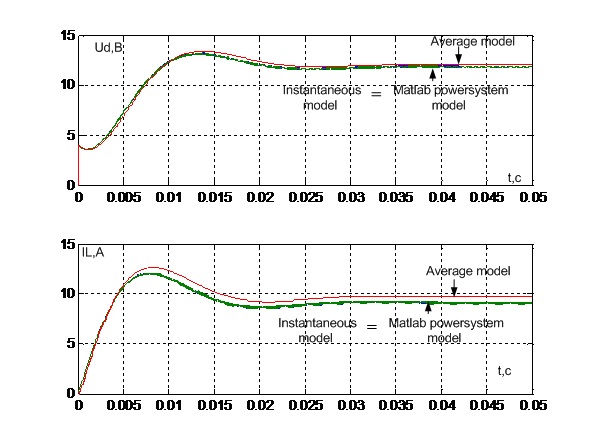
Рисунок 3.4 – Результаты работы моделей при шаге дискретности 2 мкс
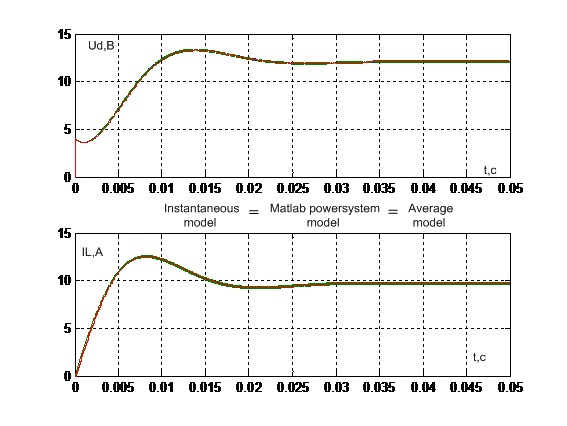
Рисунок 3.5 – Результаты работы моделей при шаге дискретности 0.2 мкс

Рисунок 3.6 – Увеличенные графики работы модели в переходном и установившемся режимах работы
4. Требования, предъявляемые для системы управления повышающим импульсным преобразователем
В случае питания нагрузки в виде двигателя отклонение напряжения вниз не позволит двигателю выйти на паспортные характеристики: мощность, магнитный поток.
Если же нагрузкой выступает сеть, то снижение выходного напряжения ИП (от него зависит выходное напряжение генератора) автоматически затруднит отдачу максимальной мощности.
С точки зрения динамики работы важным фактором является изменение параметров нагрузки (колебания напряжения сети, изменение режима работы электромобиля). Поэтому поддержание постоянного напряжения на выходе импульсного преобразователя важно, для защиты полупроводниковых устройств. В этом случае система управления должна быстро реагировать на любые внешние и параметрические возмущения в работе схемы.
Для описанных выше применений солнечной электростанции и электромобиля управление повышающим ИП должно обеспечивать [3–5]:
- Достаточную точность в регулировании выходного напряжения.
- Обладать высоким быстродействием в регулировании напряжения.
5. Описание аппаратного модуля ШИМ микроконтроллера STM32F4
Процессоры с ядрами ARM на данный момент широко применяются в мобильных устройствах и встраиваемых системах различного применения [6]. Архитектура обладает такими привлекательными свойствами, как удобная и эффективная система команд, мощная поддержка при разработке программного обеспечения, высокая энергоэффективность. Одной из последних версий архитектуры ARM является ARM-Cortex-хх, предполагающая варианты для процессоров общего назначения – Cortex-Aх, и для встраиваемых приложений – Cortex-Mх. Функционально архитектуры практически идентичны, за исключением того, что Cortex-A оптимизирована по быстродействию с целью достижения высокой производительности, а Cortex-M – по энергопотреблению, обеспечивая баланс между энергоэффективностью и производительностью [6].
Требования приложений для встраиваемых систем постоянно повышаются – это и обеспечение пользовательского интерфейса (сенсорный ввод, графический интерфейс), высокие мультимедийные возможности (кодирование/декодирование аудио/видеопотоков), обработка данных (цифровая обработка сигналов, интеллектуальный анализ), и все это при ограниченных энергетических ресурсах. По этой причине микроконтроллеры на базе архитектуры ARM-Cortex-Mх набирают популярность.
32–разрядные микроконтроллеры STMicroelectronics серии STM32 F4 принадлежат к наиболее мощной версии архитектуры ARM-Cortex-M – ARM-Cortex-M4F [7–8]. Это позволяет им сочетать в себе возможности:
- Микроконтроллеров общего назначения:
- богатый набор периферии;
- низкое энергопотребление;
- производительность реального времени.
- Цифрового сигнального процессора:
- оптимизированный набор команд, большинство из которых выполняются за один цикл;
- SIMD инструкции;
- схема параллельного сдвига регистров.
- Вычислительного процессора:
- блок вычислений в формате с плавающей точкой;
- одинарная точность;
- простота программирования;
- широкий диапазон обрабатываемых данных.
Для создания алгоритма управления выходным напряжением ИП предполагается использование микроконтроллера STM32F4 имеющего 2 аппаратных модуля ШИМ с углубленными настройками (advanced PWM). Каждый модуль помимо четырех независимых входов имеет следующие характеристики:
- выбор источника таймера для генерации сигнала ШИМ (TIM1/TIM8);
- установка периода ШИМ, являющийся величиной постоянной и не может изменятся во время работы;
- выбирается режим работы счетчика несущей ШИМ прямого/обратного счета или центрированная ШИМ (TIM_CouterMode_Up, TIM_CounterMode_Down, TIM_CounterMode_CenterAligned1, 2, 3);
- включение/отключение конфигурацию мертвого времени;
- задание значения мертвого времени (1–6 мкс);
- установка конфигурации блокировки таймера (TIM_LOCKLevel_OFF, TIM_LOCKLevel_1, TIM_LOCKLevel_2, TIM_LOCKLevel_3);
- Опция задержки для TIM1 – задержка входного сигнала с канала PB12, для TIM8 – задержка входного сигнала с канала PA6 (Disable, Enable with input active high, Enable with input active low);
- автоматическая активация выхода (ON/OFF);
- конфигурация выходов четырёх каналов по применению, например формирование комплементарных импульсов, только импульса верхнего ключа, или только импульса нижнего ключа;
- дополнительная конфигурация выходов, в том числе инверсия или повторение, а также настройки в режиме ожидания (логический сигнал 1 или 0).
Большинство настроек модуля для разработки алгоритма не используются. Поскольку ключ в схеме используется один, настройки комплементарного управления и мертвого времени не используются.
6. Планируемые исследования
Планируется разработка системы управления импульсным преобразователем повышающего типа, которая бы дала возможность использовать аппаратный модуль ШИМ и при этом удовлетворяла бы требованиям к системе управления.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2019 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Шавелкин, А. А. Преобразовательная техника – Шавьолкін, О.О. Перетворювальна техніка: учеб. пособие/ А.А. Шавелкин [и др.]. – Краматорск: Донбасская ДМА, 2008. – 328 с.
- Зиновьев, Г. С. Силовая электроника : учебное пособие для бакалавров. [Электронный ресурс]. – Режим доступа: http://ozon-st.cdn.ngenix.net/..
- Патент 2279705 Российская федерация, МПКG05F1/613. Способ питания нагрузки от солнечной батареи / А.И.Чернышев, Ю.М.Казанцев, А.Ф.Лекарев [та ін.]; заявитель и патентообладатель Федеральное государственное унитарное предприятие
Научно–производственный центр
. 2004128060/09; заявл. 20.09.2004; опубл. 10.07.2006, Бюл.№19.Полюс
- Мирошник Д.Н. Усовершенствование системы управления для повышения энергетической эффективности тягового частотно–регулируемого асинхронного электропривода с питанием от аккумуляторной батареи – Мірошник Д.М. Удосконалення системи керування для підвищення енергетичної ефективності тягового частотно–регульованого асинхронного електропривода з живленням від акумуляторної батареї : дис. ... канд. техн. наук : 05.09.03 : защищена 13.12.12 / Д. Н. Мірошник. – Донецк, 2012. – 193с.
- Шавелкин А.А. Преобразователь частоты с импульсным преобразователем в звене постоянного тока / А.А.Шавелкин, Д.Н. Мирошник // Вісник Національного університету
Львівська політехніка
. Серія: Електроенергетичні та електромеханічні системи. – Львів: НУЛьвівська політехніка
. 2003. –№485. – С. 156–163. - Калачев, А. Богатый набор для неординарных задач: возможности DSP в STM32F4 на ядре Cortex–M4. 2012 г. [Электронный ресурс]. – Режим доступа: https://www.compel.ru/.
- STM32 F4 Hi–Performance & DSP. [Электронный ресурс]. – Режим доступа: https://www.st.com/content/st_com/en.html.
- Иванов, Р. Самый производительный микроконтроллер на ядре Cortex-M4/ Р. Иванов, Р. Попов //Компоненты и технологии. 2012. №5. С. 96 – 101.