
Зміст
- Вступ
- 1. Дослідження
- 1.1Поняття асинхронного режиму і електричного центру хитань
- 1.2 Теоретичний огляд існуючих способів визначення ЕЦХ
- Висновки
Вступ
Порушення стійкості електроенергетичної системи представляє постійну і серйозну загрозу. Тому представляється корисним завчасно виявляти ознаки зміни умов роботи електроенергетичної системи в напрямку погіршення стійкості.
Одним з найбільш небезпечних наслідків порушення стійкості є виникнення асинхронного режиму, для недопущення його виникнення і запобігання застосовується автоматика ліквідації асинхронного режиму (АЛАР). Для коректної та ефективної роботи автоматики необхідно встановлювати її на небезпечних перетинах, що будуються по електричним центрам хитань (ЕЦК).
- Метою даної роботи є оцінка ефективності методів визначення ЕЦК, виявлення найбільш практичного з них і складання доступною і зрозумілою методики по визначенню ЕЦК.
- Огляд літератури за тематиками АР і ЕЦК;
- Огляд існуючих способів визначення ЕЦК в електричної мережі при виникненні асинхронного ходу в енергосистемі;
- Оцінка методів з точки зору точності і простоти визначення електричного центру хитань;
- Виявлення найбільш придатний спосіб для практичних цілей, наприклад, для розрахунку місць установки АЛАР і розташування ЕЦК, і теоретичних цілей, наприклад, навчання в навчальних закладах та місцях підвищення кваліфікації, цілей.
1. Дослідження
1.1 Терміни асинхронного режиму і електричного центру хитання
Виникаючі при порушенні стійкості аварійні, в тому числі асинхронні режими є серйозною небезпекою для енергосистеми, так як можуть привести до розвитку аварії і знеструмлення відповідальних споживачів. Розглянемо докладніше асинхронний режим.
Асинхронний режим (АР) – є наслідком порушення статичної або динамічної стійкості [1], якою може бути викликано:
- перевантаженням транзитних зв'язків потужностями понад максимальну допустимих по стійкості величин;
- відмовою вимикачів або захистів при КЗ в електромережах;
- відмовою або недостатньою ефективністю ПА;
- несинхронним включенням зв'язків або генераторів;
- втратою збудження потужних генераторів;
- працею енергосистеми з неприпустимо низькою напругою на генераторах і в основній мережі;
- аварійним відключення великої потужності;
- відключенням одного або декількох завантажених мережевих елементів перетинів основної мережі;
- працею з неприпустимо низькою частотою;
- поєднанням декількох факторів Зміна напрямку перетікання реактивної потужності [2].
Таким чином виділяють два види АР, з втратою збудження на генераторі і без втрати збудження, другий випадок також називають асинхронним ходом. Розглянемо докладніше режим роботи при асинхронному ході.
Фізична суть АР полягає в тому, що рух роторів синхронних машин однієї групи (окремих генераторів, всіх генераторів електростанцій, енергосистем, синхронних двигунів) відбувається з кутовий швидкістю, що відрізняється від кутової швидкості руху роторів синхронних машин іншої групи (енергосистеми, об'єднаної енергосистеми).
АР характеризується:
- Стійкими глибокими коливаннями напруги, струмів імощностей;
- Зміною взаємного кута ЕРС генераторів хоча б з однією з електростанцій по відношенню до ЕРС генераторів будь–який інший електростанції енергосис–теми на кут, що перевищує 360°;
- Виникненням різниці частот між частинами синхронної зони, вийшовшишими з синхронізму, при збереженні електричного зв'язку між ними;
- Виникненні додаткових струмів в замкнутих контурах ротора, що викликають перегрів ротора;
- Виникнення зрівняльних струмів, які можна порівняти з струмами КЗ;
- Падіння напруги в мережі;
- Появою точки ЕЦК, яка може переміщатися по системі і приво-дить до само-отключения груп енергоприймаючу установок споживачів, які опинилися поблизу ЕЦК, і відключенням відповідальних механізмів власних потреб електростанцій;
- Зміна напрямку перетікання реактивної потужності [2].
Таким чином, виникають процеси в асинхронному режимі несуть небез-ність як для всієї енергосистеми, так і для окремих її частин. Тому для запобігання розвитку аварій і знеструмлення відповідальних 16 споживачів в даний час широко застосовується автоматика запобігання порушенню стійкості, дели-тельная автоматика і інші засоби протиаварійної автоматики.
Для коректної роботи ділильної автоматики необхідно встановлювати її на небезпечних перетинах, що утворюються при виникненні асинхронного ре-жиму. Дані перетину утворюються сукупністю ЕЦК, розташованих на паралельних елементах системи.
Дана робота присвячена розробці оптимального способу визначення елект-ричного центру гойдання (ЕЦК), при виникненні асинхронного режиму (АР). Розглянемо докладніше процеси відбуваються в ЕС при виникненні АР, на прикладі одномашінной ЕС.
Будемо розглядати ліву групу синхронних машин як електростанцію, праву,як об'єднану енергосистему. Зв'язок між ними будемо розгля-ривать в електричних відстанях, наприклад, у вигляді опорів, до складу яких можуть входити ВЛ, опору трансформаторів, інших елементів і, звичайно, самих синхронних машин. Виберемо на деякому електричному відстані від електростанції (L1) точку, де нас буде цікавити напруга. До електричної системи відстань буде L2.
У нормальному режимі рух роторів всіх синхронних машин відбувається з однієї і тієї ж швидкістю, яку називають синхронної швидкістю. При цьому допускається невелике відхилення швидкості окремих синхронних машин або їх груп, але збільшення не переходить в асинхронний хід і з подальшим загасанням цього процесу. Такі явища називаються синхронними гойданнями [1].
Малюнок 1 –Модель розглянутої одномашинної енергосистеми
(анімація:10 кадрів, 5 циклів повторення, 52,6 кілобайт)
Припустимо, що електростанція передає в енергосистему певну потужність. Ця потужність визначається:
де P – потужність передається по лінії, МВт;
E1 – потужність передається по лінії, МВт;
E2 – модуль значення ЕРС системи, кВ
Х – результуюче, еквівалентний опір між електростанцією і енергосистемою;
δ – взаємний кут ЕРС станції і системи.
Эквивалентное сопротивление между электростанцией и энергосистемой, разбивается на два участка:
Где:
XL1 – - реактивне опір ділянки L1, Ом;
XL2 – реактивне опір ділянки L2, Ом;
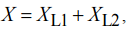
Векторна діаграма розглянутої схеми зображена на малюнку 2.
Малюнок 2 – Векторна діаграма Одномашінной системи в нормальному режимі
Оскільки вектор ЕРС енергосистеми спрямований по дійсній осі, вектор ЕРС електростанції зручно представити за допомогою показовою функції:
З деякою погрішністю можна визначити струм, що циркулює між електростанцією і енергосистемою:
Знаючи величину струму, згідно [1] величину напруги в сюжеті місці можна визначити як:
Переміщаючи точку вимірювання напруги, можна знайти таку точку, де на-напруга мінімально. Така точка називається точкою мінімальної напруги (ТМН). Якщо говорити про електричні відстанях, ТМН знаходиться якраз в середині: XL1= XL2.
Далі перейдемо від нормального режиму до АР, в нових умовах кут буде постійно змінюватися. Розглядаючи зміна напруги в точці ТМН для різних при різних значеннях кута була отримана векторна діаграма напруг наведена на малюнку 3.
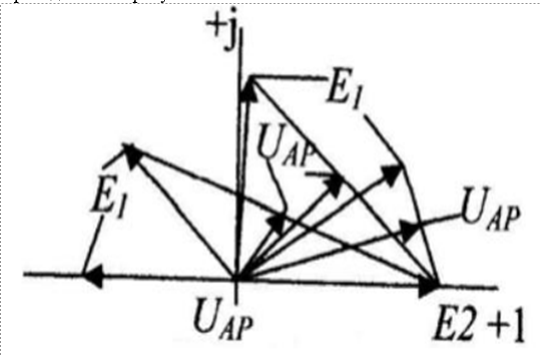
Малюнок 3 – Векторна діаграма напруг при різних значеннях кута
Для кожного значення кута визначена величина напруги в центрі кача-ний. Помічаємо, що зі збільшенням кута δ напруга в центрі хитань зменшується, при вугіллі рівному 180° воно стає рівним нулю. Покажемо зміна напруга для точки ЕЦК і струму в мережі при АР графічно на малюнку 4.
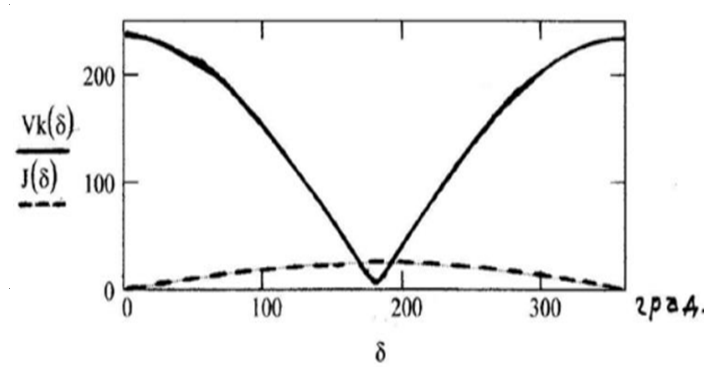
Малюнок 4 – Графік зміни напруги і струму в мережі при АР
З наведеного графіка видно, що напруга в центрі хитань досягає нуля при вугіллі рівному 180°, при цьому ж вугіллі ток асинхронного ходу досягає максимуму, за величиною він співмірний з струмом короткого замикання в цьому ж місці (центрі хитань). Таким чином асинхронний режим є неприпустимим, розглянемо докладніше шляху боротьби з АР.
Для боротьби з АР можливе виконання наступних заходів:
- Зниження активної потужності генераторів, які вийшли із синхронізму і працюють в асинхронному режимі;
- Форсування струму збудження генераторів, що призводить до збільшення їх ЕРС і, отже, до більш жорсткій прив'язці до енергосистеми, а також зниження коливань напруги [3];
- Засобами протиаварійної автоматики, яка може відключати генератори або навантаження, а в разі необхідності проводити розподіл енергосистеми на синхронно працюючі частини [2].
Успішна боротьба з асинхронним режимом може привести до відновлення процесів-нию нормального синхронного режиму. Таке явище називається ресинхронізації.
Розглядаючи зміни кута руху ротора генератора при АР, видно, що кут періодично проходить через нуль (або через кут 360°). Саме в цей момент з'являється можливість ресинхронізації. Однак, для здійснення успішної ресинхронізації необхідно, щоб майданчик прискорення була менше майданчика гальмування. У цих умовах майданчик прискорення обчислюється від кута (точніше від n360°), що ускладнює процес ресинхронізації. Тому для полегшення ресинхронізації виконують зниження потужності турбіни і форсування струму збудження генератора.
1.2 Теоретичний огляд існуючих способов визначення ЕЦК
Як вже зазначалося раніше для оцінки стану поточного режиму і проведе-ня швидких і ефективних заходів по ліквідації аварійних режимів, а також при вирішенні задач проектування та модернізації протиаварійної автоматики необхідно знати про слабких ділянках мережі (слабких зв'язках), що входять до складу небезпечних перетинів.
Одним з перших кроком у вирішенні цих завдань, є виявлення цих слабих ділянок і точок ЕЦК, що входять до їх складу. У даній роботі розглянуто 5 способів визначення місця ЕЦК, тобто електричної та географічної віддаленості ЕЦК від однієї з розглянутих шин.
Розглянуті способи визначення ЕЦК:
- Метод ТМН;
- Метод визначення ЕЦК по режимним параметрам (струму і напруги) в АР;
У методиці визначення ЕЦК ознакою наявності ЕЦК на лінії в АР є наявність точки мінімальної напруги (ТМН) на даній лінії в нормальному режимі
Важливою відмінністю методу виявлення слабких ліній на основі аналізу ТМН є можливість виявлення слабких зв'язків і потенційно небезпечних перетинів задовго до моменту настання втрати стійкості, що дозволяє використовувати ознака наявності ТМН для моніторингу та управління енергосистемою в режимі реального часу.
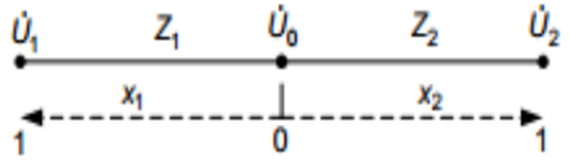
Показано, що для ділянки лінії від вузла з напругою U=U×e j×α розподіл напруги розглянутого ділянки:

де x – реактивнеий опір даної ділянки, Ом;
U0 – повнa напруга на початку ділянки, кВ;
U – повна напруга в кінці ділянки, кВ.
Схема розглянутой ділянки представлена на рис.5.
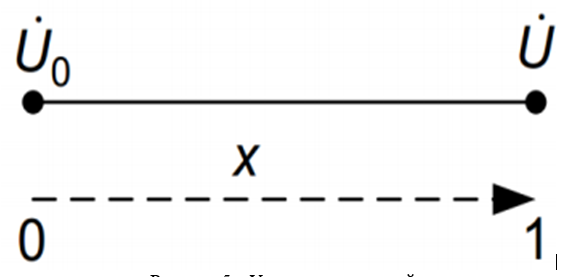
Малюнок 5 – Ділянка однорідної лінії
При цьому величина квадрата модуля напруги буде мати мінімум в точці:
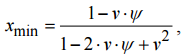
Где: Xmin – електрична віддаленість точки ТМН, Ом;
А величина напруги в ТМН:
Де νx2 – значення модуля квадрата напруга в точці ТМН. Умова попадання ТМН на дiлянку: xmin ∈ [0;1].
Розглядаючи ТМН з нульовим значенням напруги, тобто переходячи до ЕЦприймаючи умови кут дорівнює 180 ° при довільній величині v положення ТМН буде визначатися за спрощеною формулою:
Таким чином, при провороте векторів U0, U при асинхронному ході в момент, коли кут між напругою ділянки сягає 180°, ТМН поєднується з точкою електричного центру хитань.
При меншому куті розвороту векторів напруг наявність ТМН може розглядатися в якості покажчика на лінію з ЕЦК. Діаграма розподілу напруги уздовж ЛЕП представлена на малюнку 6.
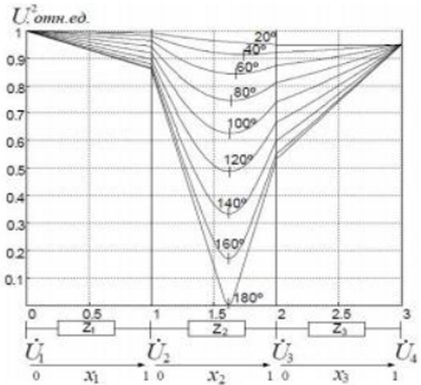
Малюнок 6 – Діаграма розподілу напруги уздовж ЛЕП
З діаграми видно, що величина квадрата напруги на ділянках Z1 и Z3 змінюється практично лінійно, а на ділянці Z2, починаючи з деякої величини кута розвороту ЕРС, має характерною особливістю–наявністю мінімуму квадрата модуля напруги.
Положення ТМН визначається структурою і параметрами схеми. ТМН виявляється вже при відносно невеликих кутах розвороту і задовго до досягнення напруги абсолютного мінімуму напруги в точці ЕЦК [5].
Географічна віддаленість ТМН визначається за наступною формули:
Географічна віддаленість ЕЦК в свою чергу, визначається по слідуючей формулою:
Виникає питання про правомірність застосування даного методу на лініях з проміжною навантаженням, суміжних ділянках однорідних і неоднорідних ліній.
Так при суміжних однорідних лініях, визначення місця ЕЦК може вестися як для кожної ділянки суміжній лінії, так і для всієї ділянки однорідної лінії в цілому, що є більш доцільно і підтверджено пророблену в роботі розрахунками.
Якщо ж розглядаються суміжні неоднорідні лінії, приклад лінії показаний на малюнку 7, то згідно [6], визначення місця ЕЦК необхідно вести окремо для кожного з суміжних ділянок, тобто послідовно розглянути ділянки Z1 і Z2.
Малюнок 7 – Суміжний ділянку неоднорідною лінії
Наявність же проміжної навантаження не впливає безпосередньо на методику визначення ЕЦК на суміжних ділянках лінії, але призводить до зміщення місця розташування ЕЦК.
При виникненні АР в ЕС, стійкі спостерігаються глибокі коливаннями напруги, струмів і потужностей. Даний метод направлений на визначення ЕЦК в АР виходячи з струмів і напруг. Електричну віддаленість, тобто опір лінії при вугіллі, ЕЦК від однієї з шин згідно [7] знаходиться за формулою:
Де ХЕЦК – – електрична віддаленість ЕЦК, Ом;
U – фазна значення напруги на шині лінії з ЕЦК, кВ;
Визначивши електричну віддаленість ЕЦК від шини, необхідно визна-лити її географічну віддаленість, тобто визначити на якому кілометрі лінії знаходиться ЕЦК. Для цього необхідно визначити опір ЛЕП в нормальному режимі, і скласти співвідношення. Опір лінії в нормальному режимі визначається за формулою:

Географічна віддаленість ЕЦК визначається за формулою:
Де lЕЦК – географічна віддаленість місця ЕЦК від шини, км.
Висновки
Висновок. На момент написання даного автореферату, магістерська робота не була закінчена і в майбутньому передбачає розрахунок моделювання та аналізу виникнення електричного центру хитань. При розрахунках планується використовувати програмно-обчислювальний комплекс MathCAD, який дозволяє в режимі реального часу оцінювати вплив хитань на роботу енергосистеми в цілому і окремих елементів зокрема
Список джерел
- Профилактические испытания изоляции оборудования высокого напряжения, Бажанов С.А., М., ЭНЕРГИЯ, Москва 1968 г.,72 с.
- Обслуживание электрических подстанций/ О.В. Белецкий, С.И. Лезнов, А.А Филатов. – М.: Энергоатомиздат, 1985, – 416 с.
- Обслуживание генераторов, Чернев К.К. – М.: Энергоатомиздат, 1989 г., 592 с.
- Электрические системы и сети, Идельчик В.И. Учебник. – М.: Высшая школа, 2003. – 463 с.
- Электрические машины, Кацман М.М. Учебник. – М.: Высшая школа, 2003. – 463 с.
- Рожкова Л.Д., Козулин В.С., Электрооборудование станций и подстанций 3–е изд., перераб. и доп. Учебник для техникумов. М.: Энергоатомиздат, 1987. – 648 с.
- Неклепаев Б.Н. Электрическая часть электростанций и подстанций. Учебник для вузов – 2–е изд. М. Энергоатомиздат, 1986. – 640 с.
- Сайт компании
DIMRUS
Измерение частичных разрядов в изоляции статоров высоковольтных электрических машин [Электронный ресурс] – Режим доступа: Компания DIMRUS – (дата обращения: 15.10.18). - Сайт компании
DGM KZ
Краткая информация о частичных разрядах (ЧР) и их измерении [Электронный ресурс] – Режим доступа: Компания DGM KZ – (дата обращения: 17.10.18). - Выдержка из книги Бажанов С.А. Профилактические испытания изоляции оборудования высокого напряжения [Электронный ресурс] – Режим доступа: Большая энциклопедия нефти и газа – (дата обращения: 14.11.18).
- Выдержка из книги Бажанов С.А. Профилактические испытания изоляции оборудования высокого напряжения [Электронный ресурс] – Режим доступа: Большая энциклопедия нефти и газа – (дата обращения: 10.12.18).
- Сушка изоляции генераторов [Электронный ресурс] – Режим доступа: Электронный ресурс KazEDU – (дата обращения: 16.12.18).