Аннотация
О.Е. Новикова, А.В. Лавшонок Исследование программного алгоритма СИФУ тиристорного регулятора напряжения. Проведены исследования влияния погрешности подачи управляющих импульсов тиристоров на момент двигателя в среде Simulink MATLAB. Определены требования к точности СИФУ.
The influence of the gate trigger circuit (GTC) pulses error on the engine torque in the environment of the Simulink MATLAB are researched. The requirements for the accuracy of GTC are determined.
Ключевые слова
Точность, тиристорный регулятор напряжения, СИФУ, погрешность, импульсы, программный алгоритм, момент.
Accuracy, thyristor voltage regulator, GTC, error, pulses, software algorithm, torque.
Целью исследований является определение влияния погрешности работы СИФУ на работу системы ТРН–АД.
Тиристорный регулятор напряжения (ТРН) – устройство, предназначенное для регулирования напряжения подаваемого на асинхронный двигатель. ТРН состоит из трех пар тиристоров по одной для каждой фазы напряжения. Силовые элементы включены встречно-параллельно для протекания синусоидального тока в двух направлениях.
ТРН широко применяются для регулирования скорости и плавного пуска асинхронных двигателей различной мощности. Данная схема обеспечивает также и реверс, в случае добавления двух пар тиристоров.
Изменение угла отпирания ключей осуществляется посредством системы импульсно-фазового управления (СИФУ).
При разработке программного алгоритма СИФУ возникает вопрос необходимой точности подачи управляющих импульсов.
Для достижения поставленной цели была составлена модель (рисунок 1) в среде Simulink MATLAB, которая включает в себя: трехфазный источник питания, подсистему СИФУ и ТРН, АД, блок для создания нагрузки, блок измерений.
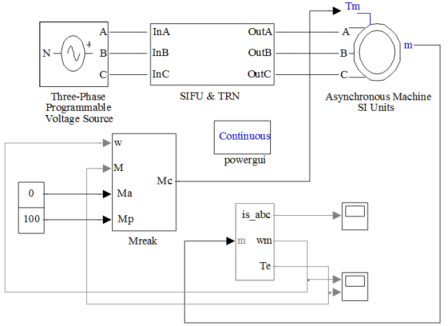
Рисунок 1 – Модель для исследования работы СИФУ ТРН
При схеме ТРН без нейтрального провода (рисунок 2), работа фаз регулятора становится зависимой, поэтому необходимо включать тиристоры попарно для соответствующих фаз. Коммутация тиристоров осуществляется в следующей последовательности: VS1+VS6, VS6+VS3, VS3+VS2, VS2+VS5, VS5+VS4, VS4+VS1.
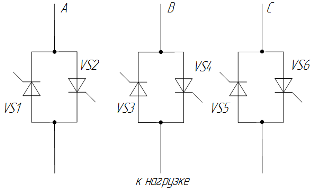
Рисунок 2 – Схема ТРН без нейтрального провода
Все импульсы управления тиристорами следуют друг за другом с интервалом в 60°. Угол управления, алгоритм подачи и длина импульсов описаны в m-файле. Также в нём задается величина погрешности управления в секундах и выполняется увеличение угла отпирания положительного тиристора фазы А и отрицательного тиристора фазы С на величину этой погрешности.
В ходе исследования было выявлено, что колебания момента возрастаю при увеличении погрешности подачи импульса. На рисунке 3 штриховой линии соответствует момент при отсутствии погрешности Δt=0 мкс, а сплошной – момент при погрешности Δt=200 мкс. Угол управления равен α=90°. Аналогичная зависимость построена и для угла α=120° (рисунок 4).
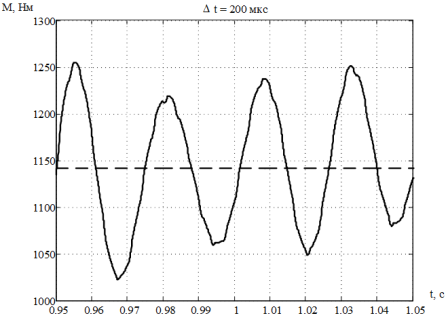
Рисунок 3 – Момент двигателя при Δt=0 мкс и Δt=200 мкс (α=90°)
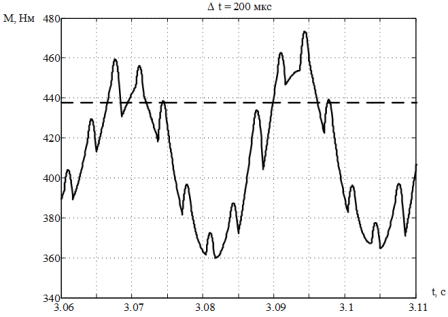
Рисунок 4 – Момент двигателя при Δt=0 мкс и Δt=200 мкс (α=120°)
Для определения необходимой точности СИФУ построим зависимость амплитуды колебаний момента и отклонения угловой скорости от величины погрешности для углов управления α=90° и α=120° (рисунок 5,6).
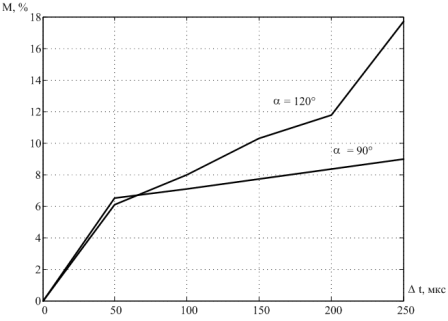
Рисунок 5 – Зависимость амплитуды колебаний момента двигателя от погрешности угла управления
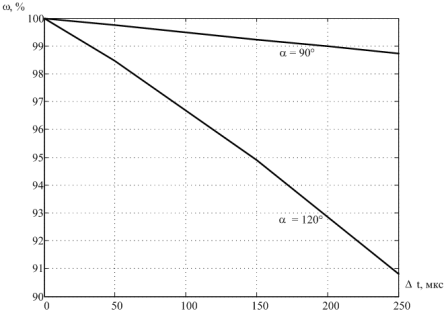
Рисунок 6 – Зависимость отклонения угловой скорости двигателя от погрешности угла управления
Полученные зависимости показывают увеличение амплитуды колебаний момента и снижение угловой скорости при увеличении погрешности подачи импульсов управления тиристорами.
На рисунке 5 допустимая погрешность составляет не более 38-41 мкс, так как амплитуда колебаний момента увеличивается до 5%. Для скорости – не более 150 мкс (рисунок 6).
Выводы
В результате исследования модели работы системы ТРН-АД определена максимально допустимая погрешность СИФУ не более 38 мкс.
Перечень ссылок
- Силові напівпровідникові перетворювачі енергії : навч. посібник / О. О. Шавьолкін ; Харків. нац. ун-т. міськ. госп-ва ім. О. М. Бекетова. – Харків : ХНУМГ ім. О. М. Бекетова, 2015. – 403 с.
- Полунин, А. И. Оптимизация систем управления плавного пуска ленточными конвейерами / А. И. Полунин, А. В. Лавшонок // Автоматизация техно-логических объектов и процессов. Поиск молодых; сборник научных трудов XVI Международной научно-технической конференции аспирантов и студентов, 25-26 мая 2016 г., г. Донецк : в рамках 2-го Международного научного форума "Инновационные перспективы Донбасса". – Донецк : ДОННТУ, 2016. – С. 190–193.