
Реферат по теме выпускной работы
ВВЕДЕНИЕ
1 ТЕХНОЛОГИЯ ДВИЖЕНИЯ ЭЛЕКТРОВЕЛОСИПЕДА
1.1 Электровелосипед. Описание и механика.
1.2 Типы велосипедных электроприводов
1.3 Описание тяговой аккумуляторной батареи
1.4 Требования к электроприводу
2 РАСЧЕТ МОЩНОСТИ ДВИГАТЕЛЯ И ВЫБОР СИЛОВОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
2.1 Обоснование выбора типа привода и двигателя21
2.2 Особенности кинематической схемы3
2.3 Формирование момента сопротивления 24
2.4 Выбор микроконтроллера и транзисторного драйвера управления двигателем26
2.5 Расчет мощности двигателя и его проверка39
2.6 Обоснование выбора аккумуляторной батареи
2.7 Обоснование выбора системы управления
2.8 Экономическая часть
3. РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ
3.1 Описание системы управления косвенного регулирования скорости двигателя постоянного тока с обратной связью по ЭДС якоря и синтез регуляторов системы
3.2 Математическое описание ДПТ
4. МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДА ВЕЛОСИПЕДА
4.1 Математическая модель тягового электропривода
4.2 Результаты моделирования
ВЫВОДЫ
ПЕРЕЧЕНЬ ИСТОЧНИКОВ
Введение
Данный проект посвящен изучению такого траспорта как электровеосипед. В последние десятилетия высокими темпами растет количество велосипедов во всем мире. Это связано с тем, что велосипед это экологически чистый вид транспорта и имеет ряд преимуществ перед другими средствами передвижения. Велосипеды с плавно крутящимися педалями и ловко обходящие утомительные пробки мотоциклы уже стали привычными деталями пейзажа современного города. Такими двухколесными средствами передвижения никого не удивить. А вот объединяющие их лучшие черты электрические велосипеды только начинают набирать популярность, оставаясь пока экзотикой, по крайней мере, в странах СНГ. Его дальнейшее изучение и модернизация представляется актуальной. Работа востребована.
1. Технология движения электровелосипеда
Электр́ический велосип́ед (Электровелосипед, пауэрбайк, ebike, pedelec
(англ.))
представляет собой велосипед
с
электрическим приводом, который частично или полностью обеспечивает его
движение. Его называют, также, велогибридом, хотя гибридный велосипед
— это
велосипед, сочетающий в своей конструкции как атрибуты горного, так и
шоссейного велосипедов [1].
В общем
случае электровелосипед отличает от обычного наличие трёх
дополнительных
компонентов: электродвигателя, аккумуляторной батареи и контроллера. В
отличие
от электроскутера или же мотоцикла, электровелосипед может приводиться
в
движение педалями, а его эксплуатация и обслуживание немногим сложней
обращения
с обычным велосипедом.
Электровелосипеды
мало
чем
отличаются от обычных велосипедов. Единым различием есть физические
усилия,
которые необходимо прилагать владельцу. Иными словами, если человек
устал
крутить педали, за него эту работу начинает выполнять колесо-мотор.
Благодаря
этому приспособлению велосипед передвигаться в режим мопеда и без
особых усилий
преодолевает крутые подъемы, но при этом не используется шумный
бензиновый
мотор [1].
На сегодняшний день преимущества элетровелосипедов по сравнению с городским общественным и частным транспортом становятся все очевидней. Множество людей, в больших городах, желая сэкономить время на передвижение и избежать простоев в пробках, отказываются как от общественного транспорта, так и от частных автомобилей, и пересаживаются на велосипеды.
Но не каждый человек в
состоянии
прилагать определенные физические усилия. И именно такие люди чаще
всего
выбирают альтернативные виды велосипедов, а именно элетровелосипеды.
Учитывая
постоянный рост продаж велосипедов
с электрическими двигателями становиться очевидным, что за этими
велосипедами
будущее. Популярности элетровелосыпедам придает и тот факт, что для
управления
ими нет необходимости получать какие-то разрешительные документы или
иметь
водительское удостоверение [1].
Принципиальные
преимущества :
-
Велосипед с электромотором позволяет преодолевать крутые подъёмы и значительные расстояния физически неподготовленным людям
-
Наиболее совершенные из существующих LiFePO4 аккумуляторы имеют срок службы 5-10 лет и обеспечивают запас хода до 100 км.
-
Заряд аккумуляторов осуществляется от бытовой электросети
-
Когда батарея разрядится, можно использовать педальный привод
-
При сопоставимой скорости в городских условиях, энергетические и экономические затраты на перемещение одного человека оказываются на порядок меньше, чем у любого другого вида транспорта, включая общественный
-
В сравнении с легковыми автомобилями эксплуатация, парковка и хранение электрических велосипедов требуют в десятки раз меньше расходов и пространства.
-
Уменьшение загрязнения атмосферы в случае массового отказа от автомобилей с ДВС в пользу электровелосипедов [1].
- Несовершенства существующих конструкций:
-
Педалирование и управление затруднено большей массой (от 14 до 50 кг и более) и соответствующей инерцией электрических велосипедов
-
Недостаточный для многих пользователей запас хода только на электроприводе от недорогих аккумуляторов (25-50 км)
-
Длительное время зарядки обычных батарей (не менее 4-6 часов)
-
Короткий срок службы наиболее распространённых свинцово-кислотных и литий-ионных аккумуляторных батарей (не более 2-3 лет при средней нагрузке).
-
Недостаточная проходимость и надёжность на дорогах без покрытия для электровелосипедов со стандартным моторколесом: пластиковые шестерни моторколеса в условиях повышенных вибраций быстро изнашиваются.
-
Высокая стоимость изделия и его эксплуатации по сравнению с обычным велосипедом (от 3 до 10 раз) [1].
2.1 Расчёт мощности двигателя и выбор силовой части электропривода
Был выбран подвесной тип привода и мотор-редуктор постонного тока MY1016Z3 с передачей на основную цепь велосипеда, исходя из преимуществ данного типа электропривода на велосипед: приемлимая цена, простота установки, небольшие габариты. Двигатель устанавливается на «перья» велосипеда (Рисунок 2.1-2.4).
Характеристики двигателя
MY1016Z3:
-
Непрерывный Ток (A): 18.7A
-
Применение: Лодка,Автомобиль,Электрический велосипед,Бытовая техника
-
Выходная мощность: 350W
-
Защитные характеристики: Полностью закрытый
-
Конструкция: Постоянный магнит
-
Сертификация: CCC
-
Крутящий Момент: 1.11N.m
-
Скорость (RPM): 3000rpm
-
Коммутация: Кисть
-
Напряжение (V): 24V
-
Размер модели: MY1016
-
Эффективность: 76%
-
Применение: DIY
-
Тип: high speed motor
Редуктор:
зубьев - 9;
шаг - 12,7 мм (стандарт велосипедной цепи);
толщина
зуба
- 3 мм;

2.2 Выбор микроконтроллера и транзисторного драйвера управления двигателем
Учитывая характеристики выбранного двигателя был выбран драйвер:
VNH2SP30-E.
Общие характеристики:
Таблица 2.1 – Общие характеристики выбранного драйвера
|
Тип |
(on) |
||
|
VNH2SP30-E |
19 mW max (per leg) |
30 A |
41 V |
- Выходной ток: 30A
- Логический уровень совместимых входов: 5V
- Отключение при слишком низком или слишком высоком напряжении
- Отключение при перегреве
- Защита перекрестной проводимости
- Линейный ограничитель
- Очень низкая потребляемая мощность
- Частота ШИМ до 20 KHz
- Защита при потере земли или питания
- В соответствии с 2002/95/EC Европейской директивой
Описание драйвера:
VNH2SP30-E – мостовой драйвер двигателя, предназначенный для широкого спектра автоматических задач. Устройство включает двойные монолитные драйверы High-Side и два Low-Side выключателя. Выключатель драйвера High-Side разработан с использованием STMicroelectronic’s, известной и проверенной собственной технологией VIPower™ M0, которая позволяет эффективно объединять два в одном. МОП-транзистор питания с интеллектуальной схемой защиты.
Выключатели Low-Side - вертикальные МОП-транзисторы, произведенные STMicroelectronic’s с и использованием собственного EHD (‘STripFET™’) процесса.
Три
компонента собраны
в пакет MultiPowerSO-30 на электрически
изолированных свинцовых каркасах. Это устройсто, специально разработанное
для суровой производственной среды позволяет получить
приемлимые тепловые
характеристики благодаря экспонированным
прокладкам. Входные сигналы INA и INB могут напрямую взаимодействовать
с микроконтроллером для выбора направления движения и торможения.
Они также обеспечивают цифровой сигнал обратной связи. Пин CS
позволяет контролировать ток двигателя, обеспечивая
пропорциональное значение
тока. ШИМ, до 20 кГц, позволяет нам контролировать скорость
двигателя во всём возможном диапазоне
работы двигателя. Во всех случаях состояние недопустимых значений пин
PWM
отключит как LSA, так и LSB переключатели. Когда PWM достигает
определённых
значений, LSA илиLSB включается снова в зависимости от входного сигнала.
Была
выбрана система косвенного регулирования скорости двигателя постоянного
тока с обратной связью по ЭДС двигателя, так как отсутствуют жёсткие
требования к точности регулирования скорости и
отсутствует возможность регулирования магнитного потока двигателя.
Применение
этой системы обосновывается невозможностью использования в данных
условиях
датчика скорости.
3 Особенности кинематической схемы
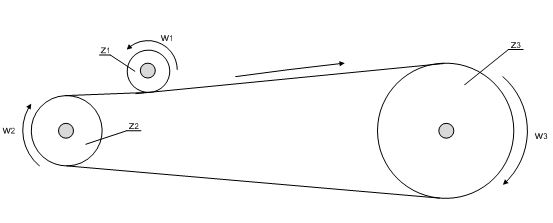
Рисунок 3 – Кинематическая схема
i_d = 9.78: 1;
Передаточное отношение сцепления с задней звездой:
i_12=z_1/z_(2 )=9/16 = 0.56 ;
Суммарное передаточное число c двигателя на заднюю звезду:
i_д2 = (9.78 : 1)/0.56 = 17.46 : 1 ;
Передаточное число с задней звезды на колесо:
i_2к =z_2/z_к= R_2/R_к , где:
z_(2 )= 16; - число зубьев задней звезды;
d = 12,7 мм; - шаг звена велосипедной цепи;
Тогда длина окружности задней звезды:
L_2=z_(2 )× d = 16 × 12,7 = 0.2 (м);
R_2 = L_2/2π;
R_2 = 0.2/2×3,14 = 0,0318 (м);
i_2к = 0,0318/0,33 = 0,096;
Суммарное передаточное число с двигателя на колесо:
i_∑ = i_2к × i_д2 = 0,096 × 17,46 = 1,68;
Частота вращения задней звезды и колеса:
n_н=3000 об/мин;
〖n_2=n〗_н/i = 3000/17.46=171,8 (об/мин) = 2,86 (об/с);
Радиус 28'' колеса с покрышкой:
R_к≈ 330мм ;
Длина окружности колеса :
L_к= 2πR≈660×π
≈ 2.07 (м) ;
Линейная скорость:
V = n×L = 2,86×2.07= 5.92 м/c = 21.36 (км/ч);
Выводы
Проведён анализ электровелосипеда, как тип транспорта.
Проанализированы различные виды
электропривода на велосипед и типы источников питания.
Выбран подвесной тип привода,
двигатель постянного тока независимого возбуждения и аккумулятор типа
LiFePO_4, исходя из поставленной задачи и экономических рамок.
Составлена и рассчитана кинематическая
схема проектируемого электровелосипеда.
Была выбрана оптимальная система
управления, драйвер питания и управляющий микроконтроллер.
Разработана модель двигателя постоянного
тока независимого возбуждения с системой косвенного регулирования
скорости двигателя постоянного тока с обратной связью по ЭДС
двигателя.
Список источников
1. Электронный ресурс. Режим доступа https://ru.wikipedia.org/wiki/Электрический_велосипед , (Дата обращения: 11.05.2017).
2. Электронный ресурс. Режим доступа http://lifepo4.by/akkumulyatory-dlya ,(Дата обращения: 10.05.2017).
3. Электронный ресурс. Режим доступа http://www.isopromat.ru/tmm/kratkij-kurs/trenie-kachenija, (Дата обращения: 9.05.2017).