
Тиристорный преобразователь – двигательв Matlab+Simulink
Авторы: В.В. Кибардин, О.А. Ковалева, В.Н. Язев
Источник: Журнал: Вестник Красноярского государственного аграрного университета №6, 2015 года, с. 82-89.
В статье рассмотрены особенности моделирования системы «тиристорный преобразователь–двигатель» в MATLAB+Simulink.
Ключевые слова: электродвигатель, преобразователь, структурные схемы, модульный оптимум, обратные связи, пространство состояний, регуляторы, переходные процессы.
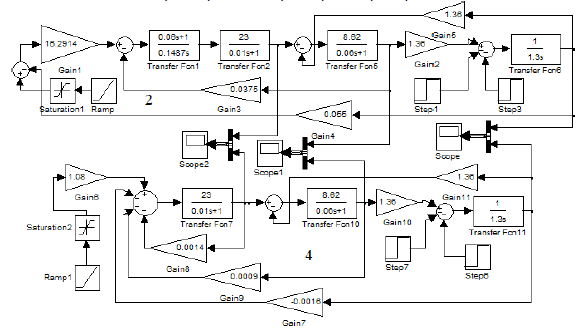
Анализ динамических свойств электромеханических объектов, структурная схема которых приведена на рисунке 1, целесообразно выполнять с помощью пакета прикладных программ MATLAB+Simulink [1, 2]. Такое представление адекватно отражает свойства двигателей постоянного и переменного тока, работающих на линейном участке электромеханической характеристики при однозонном регулировании скорости, и применяется при выборе структуры и параметров регуляторов по критериям модульного, симметричного и компромиссного оптимумов [3, 4].
Рассмотрим особенности моделирования мехатронного объекта [3], структурная схема которого в MATLAB+Simulink приведена на рисунке 1. Это система ТП–Д с номинальными данными: двигатель (Д) – Pном = 30 кВт; Uном = 220 В; Iном = 147 А; ωном = 157 с-1; ω0 = 169 c-1; ωmax = 187 c-1; момент сопротивления номинальный Мном = 150 Н·м; кратность пускового тока = 2; тиристорный преобразователь – Uном = 230 В; Uy = 10 В; Iном = 300 А; кратность кратковременной перегрузки по току = 1,2.
При моделировании таких объектов нужно учитывать ток холостого хода, который для асинхронных двигателей (АД) с короткозамкнутым ротором достигает 20–40 % от номинального тока статора, а для двигателей постоянного тока – 10–30 % от номинального тока якоря. Он обусловлен механическими потерями и наличием воздушного зазора между статором и ротором АД [5]. Для учета этого на вход интегрирующего звена включен генератор ступенчатого сигнала Step3, 4. Амплитуда этого сигнала выбрана из условия, что ток хх≈30 А.
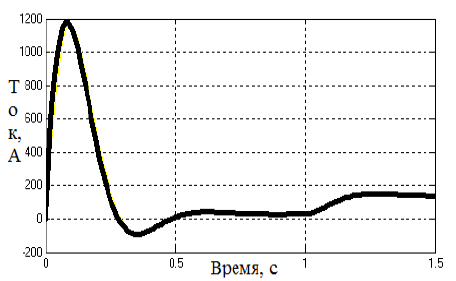
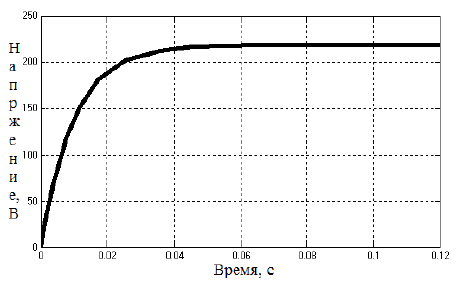
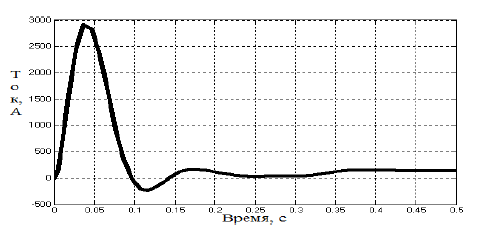
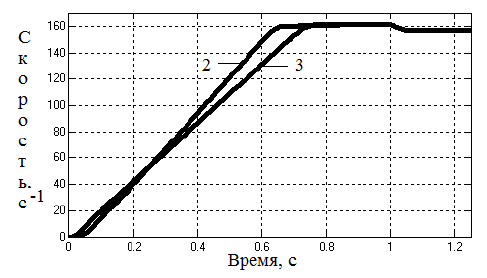
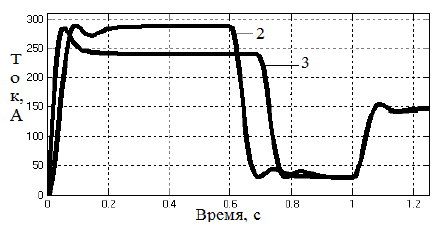
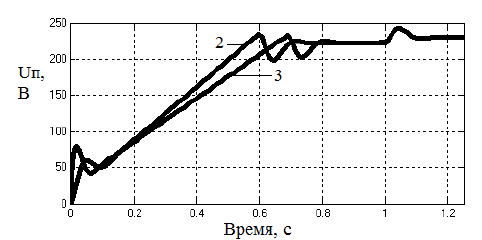
На рисунках 2–4 представлены переходные характеристики Д и системы ТП-Д: угловая скорость (t), ток двигателя I(t) и напряжение преобразователя Uп(t). Очевидно, что математические модели Д и системы ТП-Д в виде передаточных функций вход-выход адекватно отражают реальные свойства объекта управления.
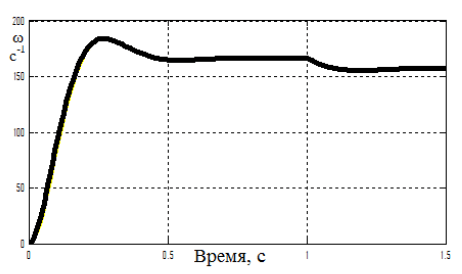
Рассмотрим замкнутую систему управления (рис. 5), регуляторы которой выбраны по критерию модульного оптимума (МО-МО).

На рисунках 6–9 представлены переходные характеристики этой системы: угловая скорость ω(t), напряжение управления Uу(t), напряжение преобразователя Uп(t) и ток двигателя I(t). Как следует из этих графиков, данная система устойчива по скорости и обладает внутренней неустойчивостью по напряжениям управления и преобразователя, а также по току двигателя, что является недопустимым в промышленных системах управления электроприводом.

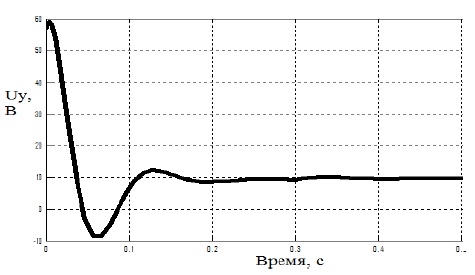

Действительно, напряжение управления должно быть не более 11 В, напряжение тиристорного преобразователя – не более 230 В, ток двигателя не более 2000 А.
Для устранения этих недостатков при моделировании таких систем необходимо или включать на входе системы задатчик интенсивности (система 2), или ограничивать управляющее воздействие регулятора (система 3) внешнего контура (рис. 10), тем более что это соответствует практике работы промышленных систем управления электроприводом.

В данной модели задатчик интенсивности реализован с помощью блока Ramp (формирует линейно изменяющееся воздействие) и блока ограничения выходного сигнала Saturation (рис. 10, 2). Ограничение сигнала пропорционального регулятора (рис. 10, 3) также реализовано с помощью блока Saturation.
Анализ полученных результатов показывает (рис. 11–13), что обе системы обладают устойчивостью как по переменной выхода – угловая скорость ω, так и по внутренним переменным – ток двигателя I и напряжение источника питания Uп. Кроме того, система 3 обеспечивает лучшие условия пускового режима, хотя и проигрывает в быстродействии. На интервале времени от 0,2 до 0,7 с источник питания работает в режиме источника тока. Время переходного процесса 0,6–0,7 с.
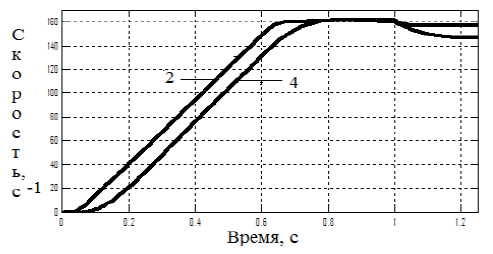
Ограничение внутренних переменных при моделировании механотронных систем можно реализовать, если решить задачу методом аналитического конструирования регулятора (АКОР, линейно-квадратичный регулятор, LQR-регулятор), используя представление объекта управления в пространстве состояний в виде матричной передаточной функции [6]. В качестве переменных состояния рассматриваем напряжение на выходе преобразователя, ток двигателя и угловую скорость. На рисунке 14 представлена структурная схема системы управления с оптимальными жесткими обратными связями (ЖОС), которые обеспечивают переходный процесс по скорости, аналогичный системе с регуляторами МО-МО. На рисунках 15–17 представлены переходные процессы в двух системах: система МО-МО с задатчиком интенсивности (2) и система с оптимальными ЖОС и задатчиком интенсивности (4).
Результаты моделирования позволяют сделать вывод, что система с оптимальными ЖОС обеспечивает плавные переходные процессы по всем переменным состояния. Они также совпадают с алгоритмами работы тиристорных преобразователей для плавного пуска асинхронных электродвигателей, выпускаемых промышленностью [7], следовательно, их можно использовать для определения оптимальных диаграмм работы тиристорных преобразователей.


Моделирование ТП-Д необходимо выполнять при условии, что ток холостого хода двигателя не равен нулю.
Мехатронный объект (ТП-Д), устойчивый в разомкнутой системе управления, становится неустойчивым по внутренним переменным (ток двигателя, напряжение источника питания и напряжение управления на выходе внешнего регулятора) в замкнутой системе управления, так как нет ограничений на управляющие воздействия.
При моделировании замкнутых систем управления необходимо включать в структурную схему блоки ограничений сигналов.
Представление объекта управления в пространстве состояний и использование аппарата синтеза LQR-регуляторов позволяет решить проблему внутренней устойчивости с помощью оптимальных обратных связей по переменным состояния
Зависимости U(t), приведенные на рисунках 13, 17, совпадают с алгоритмами работы промышленных тиристорных преобразователей для плавного пуска высоковольтных асинхронных электродвигателей.