
Реферат по теме выпускной работы
- Введение
- 1. История трамвая. Принцип работы
- 2. Вагон трамвайный модели 71-153(ЛМ-2008). Описание и основные положения
- 2.1 Конструкция и характеристики тягового преобразователя и электродвигателя.
- 2.2 Режимы работы. Характеристики циклов движения SAE
- 2.3 Моторная тележка
- 3. Особенности кинематической схемы
- 4. Силы сопротивления движению
- 4.1 Работа силовой схемы, содержащей комплект асинхронного электропривода
- 5. Обоснование выбора системы управления
- Выводы
- Список источников
Введение
Данный проект посвящен изучению и обоснованию теоретической возможности модернизации пассажирского одностороннего моторного четырёхосного трамвайного вагона модели 71-153(ЛМ-2008). На момент написания работы, один из самых современных трамваев в России и Украине. Работает от контактной сети постоянного тока напряжением 400-600V. В трамвае используется электропривод переменного тока с инвертором. Предусмотрен режим кратковременной автономной работы с питанием от встроенных аккумуляторов, напряжением 24V. Тяговых электродвигателей четыре, по два на каждой из тележек. Система управления асинхронными двигателями осуществляется посредством IGBT-транзисторов.
Удобный и экономичный вагон, на практике оказался достаточно надежным. Показателем надежности может служить тот факт, что, не смотря на закрытие завода изготовителя, продолжается успешная эксплуатация трамвая, и его техническое обслуживание. И, тем не менее, комплектация и электродвигательные характеристики оставляют пространство для развития и совершенствования.
Так, модернизация электропривода, и замена разредившихся аккумуляторов, приведет к повышению эффективности автономного режима работы, увеличению его продолжительности. Сегодня автономный режим работы предполагает лишь возможность отойти на безопасное расстояние от поврежденного участка сети, позволив техническим службам устранить неполадку. При этом, движение по путям под уклоном, в автономном режиме невозможно. Модернизация комплекса электродвижущего оборудования позволит проезжать поврежденные участки, от которых вагон не может получить питание, а в перспективе, возможно, и вовсе, эксплуатировать трамвай на частично обесточенных маршрутах.
1. История трамвая. Принцип работы
Трамвай – это одно из величайших изобретений человечества. Без него не было бы городов, таких, какими мы привыкли их видеть сегодня.
По мнению археологов, социологов, и экономистов, несмотря на не прекращающийся рост числа обитателей, в современных мегаполисах плотность населения намного меньше, чем в древних столицах. Это связано с множеством причин, и не в последнюю очередь с наличием крепостных стен, которые столетиями сдерживали рост внутри своих границ. Но если тугой каменный ремень просто потерял свою актуальность, из-за развития военной мысли, то проблема доступности ресурсов, оказалась сложнее.
Современный горожанин, относительно комфортно, преодолевает десятки километров, чтобы попасть на рабочее место, посетить общественную площадку, или развлечься. Его древний предок имел доступ только к тому, до чего мог дойти пешком.
Некоторым образом ситуацию спасали конные повозки. Даже первым прародителем трамвая была так называемая «конка». Она представляла собой открытый или чаще закрытый экипаж, иногда двухэтажный с открытым верхом. Вагон по рельсовым путям тянула пара лошадей, управляемая кучером (рис. 1.1) [1]. Не одно столетие люди старательно организовывали общественное движение, располагая имеющимися возможностями, но настоящим прорывом в этом смысле стал электропривод.

Рисунок 1.1 – Конка
- Программирование Ардуино [Электронный ресурс] : Справочник языка Ардуино, Украина, [2003]. URL: http://arduino.ua/... (дата обращения: 30.11.2016).
- Программирование Arduino – библиотека Servo [Электронный ресурс]: сайт создания роботов , 29 мая 2010. URL : http://robocraft.ru/...(дата обращения: 30.11.2016).
- Роботизированная рука с использованием Arduino [Электронный ресурс]: блог сайта Arduino, США, 24 июня 2014. URL : https://blog.arduino.cc/... (дата обращения: 01.12.2016).
- Использование датчика Flex [Электронный ресурс]: Проект сайта sparkfun.com, США. URL : https://learn.sparkfun.com/... (дата обращения: 20.11.2016).
- Гринь В.В., Басалыгин Е.В., Розкаряка П.И. Разработка аппаратной части Робо–руки на базе платы Arduino / Международная научно–практическая конференция ИННОВАЦИОНЫЕ ПЕРСПЕКТИВЫ ДОНБАССА // Перспективы развития электротехнических, электромеханических и энергосберегающих систем, 2017. – 230–233с., [Электронный ресурс]. Режим доступа: http://ipd.donntu.ru
- Определение сервопривода [Электронный ресурс] . Режим доступа: http://dic.academic.ru/...
- Рука и предплечье [Электронный ресурс]: Проект сайта inmoov.fr, США. URL : http://inmoov.fr/... (дата обращения 16.01.2017).
- Виды протезов рук [Электронный ресурс]. Режим доступа: : http://motorica.org/... (дата обращения 14.04.2018).
- Бионический протез руки [Электронный ресурс]. Режим доступа: : http://mech.spbstu.ru/... (дата обращения 14.04.2018).
- Разработка и анализ функционального протеза руки с нейрофизиологической системой управления [Электронный ресурс]. Режим доступа: : https://boomstarter.ru/... (дата обращения 14.04.2018).
Эрнст Вернер фон Сименс первым построил и продал механизм наиболее напоминающий современный трамвай (рис. 1.2) [1]. Это был электропоезд, который использовался для катания посетителей Германской промышленной выставки в Берлине, он питался от третьего рельса постоянным током напряжением в 150V и имел мощность 3 л.с. После успеха с выставочным аттракционом Сименс приступил к строительству электрической трамвайной линии в пригороде Берлина. Моторный вагон получал ток в 100V, и разгонялся до 20 км/ч. В 1881 первый трамвайный маршрут был открыт. В том же году общественный транспорт заработал в Париже. В 1885 году независимо от Сименса, Трамвай появился в английском городе Блэкпуле.

Рисунок 1.2 – Электрический поезд на выставке в Берлине
Трамваи работают от контактных сетей постоянного напряжения мощностью 400 – 800V. Для подключения используется токоприемник (пантограф). Сегодня на вагоны устанавливается АД с инвертором. Активно используется система управления асинхронными двигателями посредством IGBT-транзисторов. Вместо устаревающей реостатно-контакторной схемы управления. Во многих моделях предусмотрен режим автономной работы. Возможна рекуперация энергии в сеть. Средняя вместимость пассажиров от 100 человек.
Пережив периоды рассвета и упадка, становясь экономичнее и удобнее, а также составив конкуренцию другим видам электрического, и не электрического общественного транспорта, больше столетия спустя, трамвай остается перспективным средством передвижения в крупных городах. А работа над его модернизацией представляется актуальной и в ближайшие годы.
2. Вагон трамвайный модели 71-153(ЛМ-2008). Описание и основные положения
Современный трамвай (1.3) развивает скорость до 120 км/ч, средняя скорость эксплуатации до 25 км/ч, трамваи со средней скоростью выше 25 км/ч называются скоростными, это связано с необходимостью частых остановок в городских условиях. От идеи третьего рельса отошли еще в начале ХХ века.

Рисунок 2.1 – ЛМ-2008 в Донецке
Вагон представляет собой кузов, опирающийся на две ходовые тележки. Кузов состоит из пассажирского помещения с четырьмя дверьми для пассажиров, накопительными площадками и кабины водителя. На кузове расположено тяговое и вспомогательное электрооборудование: дверные приводы, песочницы и их привод, стеклоочиститель, зеркала заднего вида, сцепные приборы, звуковые сигналы и светотехническая арматура.
2.1 Конструкция и характеристики тягового преобразователя и электродвигателя.
Асинхронный тяговый двигатель получает питание от специальных статических преобразователей. Преобразователи по управляющим сигналам системы управления регулируют на выходе напряжение и частоту питания. Преобразователь тяговый ПТАД-202М-180 ЧС3.211.053 в комплекте тягового электрооборудования трамвайного вагона. ПТАД обеспечивает без-реостатное управление движением трамвайного вагона вперед и назад с плавным изменением ускорения и скорости в интервале напряжений контактной сети от 400В, до 720В, в длительном режиме до 950 В, в кратковременном режиме. При автономной работе (движение при обесточке) минимальное напряжение аккумуляторной батареи – 18В. ПТАД состоит из двух комплектов (инверторов напряжения). Каждый инвертор обеспечивает управление двигателями одной тележки (два двигателя). Инверторы работают независимо друг от друга. В состав ПТАД входят:
–преобразователь тяговый (два комплекта), расположенный на крыше трамвайного вагона
–два преобразователя напряжения «Устройства подзаряда», расположенные в преобразователях тяговых
–система индикации, диагностики состояний электропривода и бортовых устройств вагона трамвая
Тяговый асинхронный электродвигатель предназначен для преобразования электрической энергии в механическую работу, необходимую для движения вагона. Этот же электродвигатель преобразует механическую энергию вагона в электрическую энергию во работы в режиме торможения.
Конструктивно электродвигатель состоит из двух частей: неподвижной части, называемой статором и вращающейся части, называемой ротором. Обмотка статора равномерно распределена по его окружности. Обмотки фаз статора соединены в звезду. Обмотка ротора состоит из короткозамкнутых стержней. При питании трёхфазной обмотки статора трехфазным током создается магнитное поле с частотой вращения n-1. Вращающийся магнитный поток индуцирует в обмотках статора и ротора ЭДС Е1 и Е2. Под действием ЭДС Е2 в обмотке ротора возникает ток I2, при взаимодействии которого с магнитным полем статора создается электромагнитный вращающий момент М. Величина ЭДС Е и частота ее изменения f2 зависят от скорости пересечения магнитным полем статора витков обмотки ротора. Частота пересечения магнитным полем статора обмотки ротора является относительной частотой поля статора относительно ротора и равна его разности f1-f2. Если разность равна нулю, то нет движения поля. При увеличении разности частот f1-f2 величины E2, I2, f2 и М увеличиваются.
Условием работы асинхронного электродвигателя является неравенство частот вращения поля статора и ротора. Относительная разность частот вращения называется скольжением. Под действием вращающего момента ротор вращается в направлении вращения магнитного поля. Для реверсирования направления вращения электродвигателя, т.е. для изменения направления вращения ротора, необходимо изменить направление вращения магнитного поля, созданного обмоткой статора. Это достигается в трехфазных электродвигателях изменением чередования фаз обмоток статора, для чего следует поменять местами включение двух любых из трех проводов, подключающих ТАД к сети.
2.2 Режимы работы. Характеристики циклов движения SAE
Комплект асинхронного тягового электропривода в составе порожнего или груженого вагона, на ровном горизонтальном участке пути, при движении на подъеме или уклоне до 0,01 позволяет реализовать режимы движения: - пуск и автоматический разгон до скорости – 70 км/ч при процессе пропорционального увеличения частоты и амплитуды напряжения питания ТАД; - автоматический разгон до максимальной скорости, осуществляется постепенным увеличением величины скольжения до ее критической величины;
- выбег
- электрический тормоз (рекуперативный или реостатный)
- экстренное электрическое торможение (совместное действие электрического и механического рельсовых тормозов)
- торможение вагона механическим тормозом (стояночный тормоз)
- реверсирование
- регулирование интенсивного пуска путем задания водителем трамвая величины фазного тока от минимального значения 100А до максимальной величины 400А
- удержание вагона в заторможенном состоянии при стоянке под уклоном, или подъемом
- защита от юза и буксования.
Скорости для циклов SAE:
| Циклы SAE | V,км/час |
| A | 16 |
| B | 32 |
| C | 48 |
| D | 72 |
2.3 Моторная тележка
Вагон оборудован двумя моторными тележками. Тележка представляет собой две колесные пары с электроприводами (рис. 2.2).
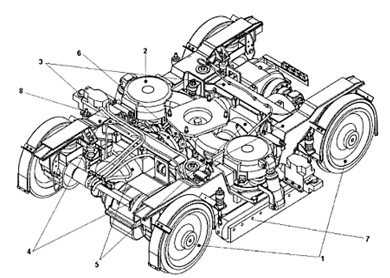
Рисунок 2.2. – Общий вид моторной тележки
На ходовых тележках размещены: колесные пары, карданно-редукторная передача, тяговые электродвигатели, тормозные устройства, дисковые тормоза с электрическим приводом и электромагнитные рельсовые тормоза.
Колесная пара состоит из двухступенчатого редуктора и двух подрезиненных колес. Максимальная статическая нагрузка на колесо не должна превышать 70 кН. Максимальный вращающий момент (тяговый или тормозной) передаваемый колесом 15 кН*м. Колесо предназначено для эксплуатации на открытом воздухе.
Основные параметры колеса:
| Наименование размера | Значение, мм |
| Номинальный размер колеса по кругу катания | 620 |
| Номинальный радиус колеса | 310 |
| Ширина бандажа | 136 |
| Ширина посадочного места | 72 |
3 Особенности кинематической схемы
На кинематической схеме показана последовательность передачи движения от электродвигателя через карданный вал и двухступенчатый редуктор к колесным тележкам трамвая (рис. 2.2).
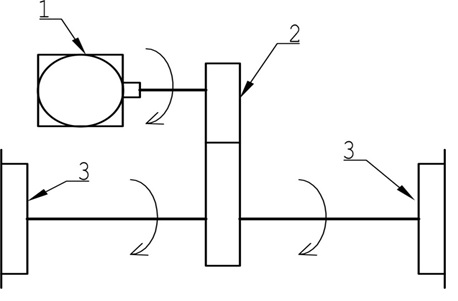
Рисунок 3 – Кинематическая схема
1 – электродвигатель; 2 – двухступенчатый редуктор; 3 – колесная пара.
4. Силы сопротивления движению
К силам сопротивления движению трамвая относят внешние неуправляемые силы, направленные, как правило, против движения вагона. Силы сопротивления движению делят на основные, действующие при движении трамвая всегда, и дополнительные, возникающие только при движении по отдельным участкам пути с уклоном, в отдельные периоды времени. Сумму сил основного и дополнительного сопротивлений называют общей силой сопротивления движению трамвая. Значение величины силы общего сопротивления движению трамвая должно быть меньше, значения величины силы движения трамвая. Это необходимое условие для сохранения трамваем номинальной скорости при движении под уклоном. Все дальнейшие расчеты будут приведены для одного электродвигателя, а учитывая, что в трамвае модели ЛМ-2008 установлено 4 электродвигателя, по одному для каждой колесной пары, масса вагона с пассажирами, будет делиться на четыре.
4.1 Работа силовой схемы, содержащей комплект асинхронного электропривода.
При наличии на входе комплекта напряжения контактной сети блоки ПТАД-202М-180 формируют выходные параметры движения (напряжение, фазные токи, частоту питания и скольжение ТАД). При наличии механических сил сопротивления вагона (сопротивление движению) и заданных водителем управляющих величин фазных токов и частоты определяется величина момента, развиваемого ТАД как при пуске, так и при тормозе. На электромеханические характеристики работы ТАД накладываются физические ограничения (по мощности, скорости движения, величине коэффициента сцепления и напряжению).
Контроллером водителя задается величина фазного тока, которая определяет ускорение вагона при пуске или замедлении, при торможении. При правильно заданном фазном токе, когда сумма электромеханических моментов всех электродвигателей превышает величину сопротивления движению и не превышает величину ограничения по сцеплению, происходит трогание и разгон вагона. В момент трогания вагона частота питающего напряжения обмоток статора тягового асинхронного электродвигателя равна частоте тока в роторе (скольжение) пропорциональное заданному фазному току.
5. Обоснование выбора системы управления
Для решения задач регулирования скорости в современном электроприводе существуют два метода частотного управления:
- скалярное управление;
- векторное управление. В рассматриваемом трамвае нашла применение векторная система управления по принципу ведущий - ведомый. При использовании векторной системы управления достигаются следующие преимущества:
- плавное, без рывков, вращение двигателя в области малых частот;
- возможность обеспечения номинального момента на валу при нулевой скорости;
- быстрая реакция при изменении нагрузки, при резких скачках нагрузки практически не происходит скачков скорости;
- обеспечение такого режима работы двигателя, при котором снижаются потери на нагрев и намагничивание, а следовательно возрастает КПД.
Наряду с очевидными преимуществами, методу векторного управления присущи некоторые недостатки, такие, как большая вычислительная сложность и необходимость знания параметров двигателя. Кроме того, при векторном управлении колебания скорости на постоянной нагрузке больше, чем при скалярном управлении.
Эти параметры по предварительным расчетам должны были обеспечить достаточную силу сжатия, скорость сгибания около двух секунд и приемлемую точность управления устройством. Первая попытка оказалась неудачной: реализовать винтовую передачу с указанными характеристиками не удалось (шаг резьбы должен был составлять 11 мм). Далее был выбран вариант с обычной резьбой болта М5, у которого шаг резьбы составляет 0.8 мм. В этом случае скорость сгибания пальца составила 24 с. Поэтому мотор–редуктор был заменен на такой же типоразмер, но с меньшим передаточным числом и более высокой скоростью оборотов в минуту, теперь номинальная скорость двигателя составляет – 2200 об/мин и номинальное напряжение - 12 В, что позволило реализовать скорость сгибания пальца в 2 с, однако пришлось пожертвовать силой сжатия.
Данная конструкция разработана для того, чтобы была возможность удерживать большие веса не с помощью электропривода, а благодаря своей конструкции. Червячная передача позволяет зафиксировать предмет и не дать ему выпасть, а выбранная конструкция дает возможность отключить приводной двигатель и зафиксировать предмет в одном положении. Это дает экономию энергии и увеличение длительности работы устройства в условиях автономной длительной эксплуатации. Можно увеличить этот показатель, заменив пластиковые делали на определенный сплав металлов для усиления конструкции и уменьшения люфтов между деталями конструкции.
Выводы
Трамвайный вагон модели ЛМ-2008 отвечает требованиям времени, его нынешняя комплектация останется актуальна еще в течении нескольких лет. Механизм, в работе, показал себя надежно. И, не смотря на закрытие Санкт-Петербуржского моторного завода, трамвай удается обслуживать силами инженеров трамвайного депо №3 в г.Донецке, что говорит о его универсальности. И все же характеристики и компоновка электродвигательной тяговой составляющей оставляет пространство для ее совершенствования.