Управление преобразователем частоты Altivar 71 при помощи ПЛК Twido с использованием сетевых протоколов ModBus и CANopen
Авторы: Д.А. Шумилкин, Е.И. Куликов
Источник: Международный научный форум ДНР. Инновационные перспективы Донбасса./ Материалы форума 2017 год.
Аннотация
Д.А. Шумилкин, Е.И. Куликов – В работе рассмотрены одни из самых распространенных промышленных протоколов: Modbus и CANopen. Выполнен их сравнительный анализ применительно к системе ПЛК-ПЧ на базе ПЧ Altivar 71 и ПЛК Twido.
Обмен информацией между устройствами, входящими в состав автоматизированной системы (компьютерами, контроллерами, датчиками, исполнительными устройствами), происходит в общем случае через промышленную сеть (Fieldbus, полевую шину
).
Промышленные сети отличаются от офисных следующими свойствами: 1) специальным конструктивным исполнением, обеспечивающим защиту от пыли, влаги, вибрации, ударов; 2) широким температурным диапазоном (обычно от -40 до +70 град); 3) повышенной прочностью кабеля, изоляции, разъемов, элементов крепления; 4) повышенной устойчивостью к воздействию электромагнитных помех; 5) возможностью резервирования для повышения надежности; 6) повышенной надежностью передачи данных; 7) возможностью самовосстановления после сбоя; 8) детерминированностью (определенностью) времени доставки сообщений; 9) возможностью работы в реальном времени (с малой, постоянной и известной величиной задержки); 10) работой с длинными линиями связи (от сотен метров до нескольких километров) [1].
Промышленные сети обычно не выходят за пределы одного предприятия. Однако с появлением Ethernet и Internet для промышленных сетей стали применять ту же классификацию, что и для офисных.
В настоящее время насчитывается более 50 типов промышленных сетей (Modbus, Profibus, DeviceNet, CANopen, LonWorks, ControlNet, SDS, Seriplex, ArcNet, BACnet, FDDI, FIP, FF, ASI, Ethernet, WorldFIP, Foundation Fieldbus, Interbus, BitBus и др.). Однако широко распространенными является только часть из них. В странах СНГ подавляющее большинство АСУ ТП используют сети Modbus и Profibus. В последние годы возрос интерес к сетям на основе CANopen и DeviceNet.
Протокол Modbus – это коммуникационный протокол, основанный на клиентской архитектуре. Протокол был разработан фирмой Modicon для использования с программируемыми логическими контроллерами.
Данный протокол является протоколом Master/Slave (Ведущий/Ведомый), который позволяет только главному контроллеру запрашивать ответы от подчиненных. Главный контроллер может адресовать задания подчиненным ему контроллерам или ПЧ [2]
Ведущее устройство – главное устройство в сети, которое может самостоятельно запрашивать данные у ведомых устройств, или рассылать широковещательные сообщения.
В сетях, работающих по принципу ведущий/ведомый, только ведущее устройство может инициировать передачу данных и определяет порядок доступа к сети.
В профессиональной литературе встречаются ещё термины мастер-устройство
, устройство-мастер
, Master
».
К достоинствам протокола Modbus относится следующее:
– отсутствует необходимость дополнительного оборудования для подключения устройства;
– простота программной реализации связи.
Недостатки протокола Modbus:
– нет начальной инициализации системы;
– не предусмотрена передача сообщений по инициативе подчинённого устройства. Ведущее устройство должно периодически опрашивать ведомые;
– длина запроса ограничена, а данные могут быть запрошены только из последовательно расположенных регистров;
CANopen – открытый сетевой протокол верхнего уровня для подключения встраиваемых устройств в промышленных сетях. Данный протокол используется для связи датчиков, исполнительных механизмов и программируемых логических контроллеров между собой [3]. Отличается повышенной помехоустойчивостью, надежностью, а также обладает следующими возможностями:
– конфигурационная гибкость;
– получение сообщений всеми узлами с синхронизацией по времени;
– режим мультимастер;
– обнаружение ошибок и передача сигналов об ошибках;
– автоматическая передача сбойных сообщений при получении возможности повторного доступа к шине;
– различие между случайными ошибками и постоянными отказами узлов с возможностью выключения дефектных узлов;
– работает по витой паре на расстоянии до 1 км.
Большинство механизмов промышленных предприятий выполнены с использованием системы Master/Slave. Например, это многодвигательные механизмы с согласованным значением скоростей или работой на общий вал и автоматическим выравниванием нагрузок.
На базе оборудования Авторизованного учебного центра Schneider Electric (ДонНТУ, г. Донецк) был рассмотрен пример реализации системы управления электроприводом с использованием промышленного протокола Modbus.
Для этой задачи использовалось следующее оборудование: ПЛК Twido (модульный базовый контроллер TWDLMDA20DTK и модуль расширения дисплея оператора TWD XCP ODM), преобразователь частоты (ПЧ) Altivar 71, а также коммуникационный кабель TWDXCAFJ010 для реализации Modbus сети.
Функциональная схема, скриншот которой представлен на рис. 1, отображает схему подключения ПЛК Twido и ПЧ Altivar 71 по сети Modbus. Эта схема разработана в пакете TwidoSuite, который предназначен для программирования ПЛК Twido.
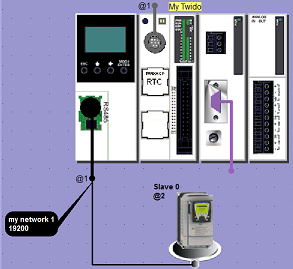
Рисунок 1 – Функциональная схема связи ПЛК Twido и ПЧ Altivar 71 по протоколу Modbus
На рис. 2 представлен пример программы для управления ПЧ.
В представленной программе присутствует 3 секции: 1) запуск макроса управления; 2) управление движением; 3) задание скорости.
Часть программного кода, написанного в секции 1, осуществляет активацию макроса управления приводом. Любая программа должна начинаться с данной строки.
В секции 2 (управление движением) приведено использование макросов для останова, пуска двигателя вперед, реверса и сброса ошибки (D_STOP, D_RUN_FWD, D_RUN_REV, D_CLEAR_ERR).
Для замыкания цепи использованы нормально разомкнутые контакты %I0.0, %I0.1, %I0.2, имитация работы которых выполняется при помощи кнопок на панели управления. Контакт %I0.1 служит для задания направления вращения электродвигателя вперед, контакт %I0.2 необходим для задания направления вращения назад (реверс). Для осуществления сброса ошибки необходимо выполнение условия замыкания контактов %I0.0, %I0.1, %I0.2 одновременно.
Секция 3 служит для задания скорости с использованием макроса D_SETPOINT_MODE. Данный макрос позволяет задать непосредственное значение скорости в оборотах, величина которого записывается в ячейку %MW4 (Memory Word). За выбор предустановленной скорости отвечают контакты %I0.3 и %I0.9. Первоначально, при выборе направления движения, двигатель разгонится до скорости 125 оборотов. Затем, при замыкании контакта %I0.3, формируется задание на разгон двигателя до скорости 250 оборотов. При замыкании контакта %I0.9 двигатель продолжит разгон до скорости 500 оборотов. Разгон до номинальной скорости реализуется программно при помощи компараторов и таймеров. Рассмотрим реализацию автоматического разгона на примере 4-й строки 3-й секции. При достижении двигателем скорости 500 оборотов запустится таймер, по истечении времени работы которого, в нашем случае 5с, поступит команда на дальнейший разгон двигателя. В первом случае до скорости 750 оборотов (строка 4). Дальнейший разгон происходит аналогично в автоматическом режиме, вплоть до номинальной скорости.
Также был рассмотрен и реализован принцип работы системы Master/Slave по коммуникационному протоколу CANopen и использовано следующее оборудование: модульный ПЛК Twido TWDLMDA20DTK, интерфейсный модуль CANopen Master для ПЛК Twido TWDNCO1M, разветвительная коробка для шины CANopen VW3 CAN TAP 2, коммуникационный кабель TSX PCX 1031, два преобразователя частоты Altivar 71.
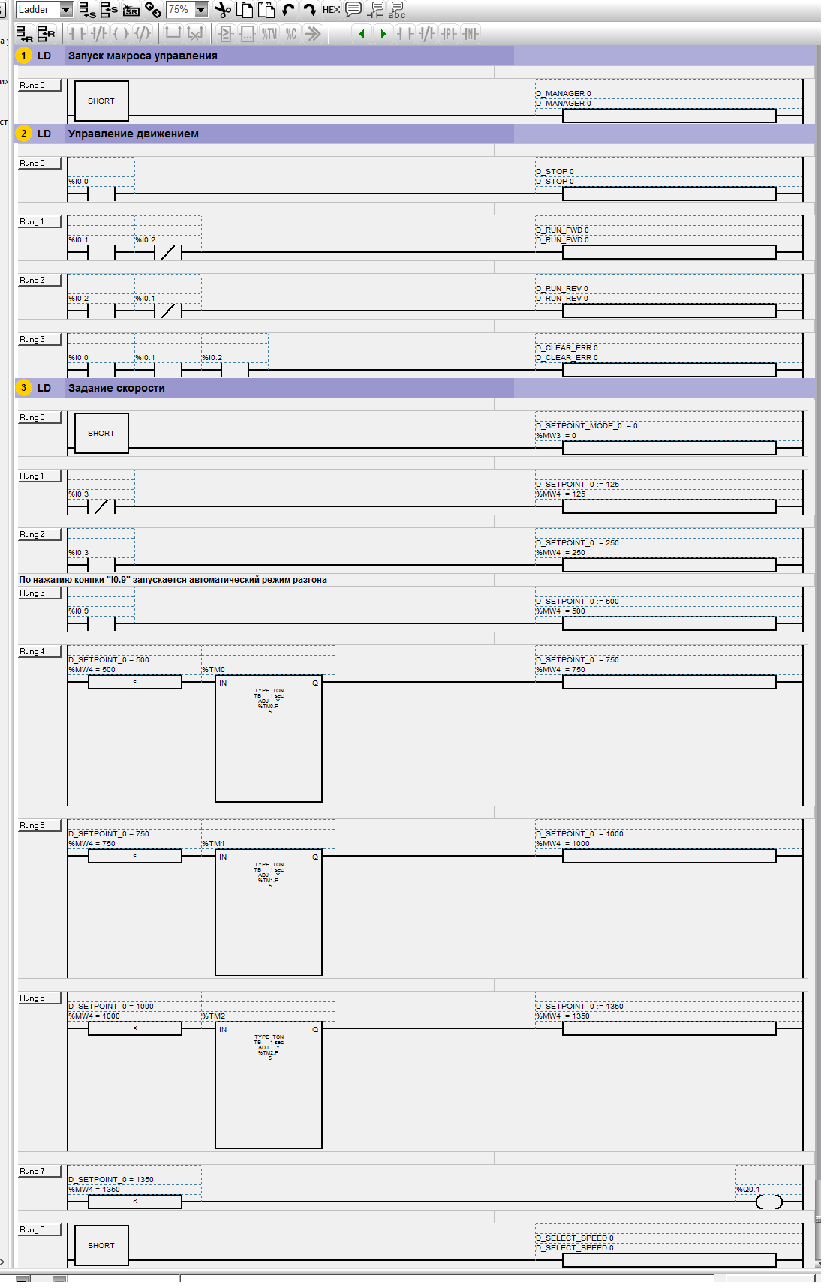
Рисунок 2 – Программный код для реализации системы управления по протоколу Modbus
На рисунке 3 приведена схема соединения двух преобразователей частоты Altivar 71 и программируемого логического контролера Twido при помощи полевой шины CANopen [4].
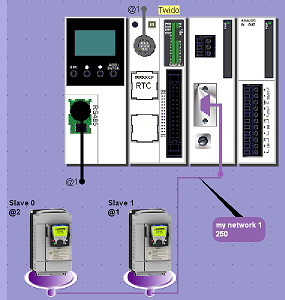
Рисунок 3 – Схема соединения по коммуникационному протоколу CANopen ПЛК Twido и двух ПЧ Altivar 71
На рис. 4 приведена часть программного кода управления двумя преобразователями частоты по протоколу CANopen. В данной программе осуществляется согласованное управление скоростями двух двигателей.
Задание на вращение первого двигателя формируется при помощи изменения напряжения на аналоговом входе первого ПЧ посредством потенциометра и затем, при помощи контроллера, формируется задание на второй ПЧ, тем самым реализовывая согласованное управление скоростями двух двигателей.
В строках Rung 0-9 приведена реализация разрешения на пуск, пуск вперед и реверс, останов двигателя и сброс ошибки. Это реализовано при помощи командного слова (CMD) путем записи в него определенных бит.
Переход в автоматический режим (строка Rung 10) осуществляется при помощи записи в регистр реального значения скорости в оборотах.
Строки Rung 21-23 отвечают за считывание задания скорости с потенциометра для первого ПЧ и передачу этого задания во второй ПЧ.
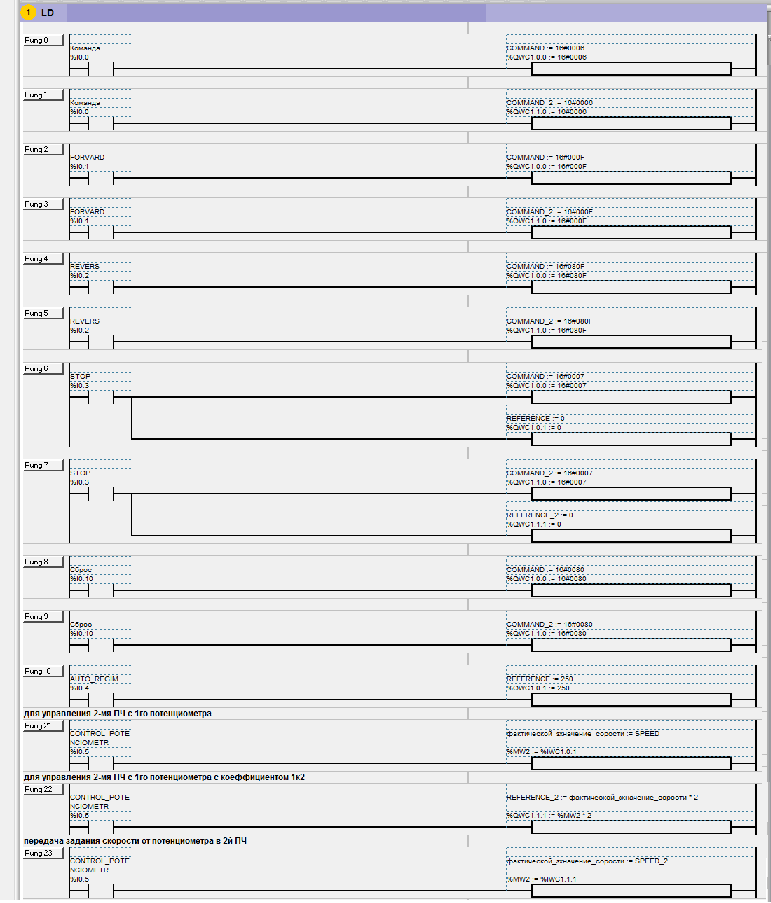
Рисунок 4 – Часть программного кода для реализации системы управления по протоколу CANopen
Заключение
Использование коммуникационных сетей в промышленной автоматизации повышает гибкость создаваемых систем, позволяя им полностью отвечать требованиям при создании и модернизации промышленных установок, технологических линий и предприятий в целом.
Рассмотренный принцип реализации системы Master/Slave по коммуникационному протоколу Modbus или CANopen может применяться в многоклетьевых прокатных станах для согласования скоростей валков, либо для согласования скоростей валков с целью обеспечения необходимого натяжения металла.
Список использованной литературы
- Энциклопедия АСУ ТП [Электронный ресурс]. Режим доступа: http://www.bookasutp.ru/Chapter2_1.aspx
- Twido. Программируемые контроллеры: справочное руководство по программному обеспечению – Schneider Electric. – 166 с.
- Википедия [Электронный ресурс]. Режим доступа: https://ru.wikipedia.org/wiki/CANopen
- Руководство пользователя по соединению Twido по CANopen