Векторное управление асинхронными двигателями
Авторы: Усольцев А.А.
Источник: Санкт-Петербургский государственный институт точной механики и оптики. Кафедра электротехники и прецизионных электромеханических систем.Учебное пособие по дисциплинам электромеханического цикла
Аннотация
Усольцев А.А. – В данной статье расмотрен принцип построения систем векторного управления асинхронными двигателями,а также модели асинхронных двигателей.
Понятие обобщенного вектора.
Большинство электрических машин переменного тока предназначено для работы в трехфазных сетях, поэтому они строятся с симметричными трехфазными обмотками на статоре, причем МДС этих обмоток распределены в пространстве по закону близкому к синусоидальному.
Синусоидальность распределения позволяет представить МДС или пропорциональные им токи обобщенным пространственным вектором на комплексной плоскости, т.е. вектором, представляющим собой геометрическую сумму отрезков, построенных на пространственных осях фазных обмоток и соответствующих мгновенным значениям фазных МДС или токов. При этом проекции обобщенного вектора на оси фазных обмоток в любой момент времени будут соответствовать мгновенным значениям соответствующих величин.
При симметричной трехфазной системе обмоток обобщенный вектор тока можно представить в виде

где A оператор поворотаа,а ia, ib и ic – мгновенные значения токов соответствующих обмоток. Обозначение вектора строчным символом принято для указания на то, что его координаты являются функциями времени аналогично тому, как строчные символы при обозначении скалярных величин указывают на мгновенное значение.
При таком представлении фазные токи ia, ib и ic можно рассматривать как проекции вектора i на соответствующие оси фазных обмоток (рис. 1.1 а)).
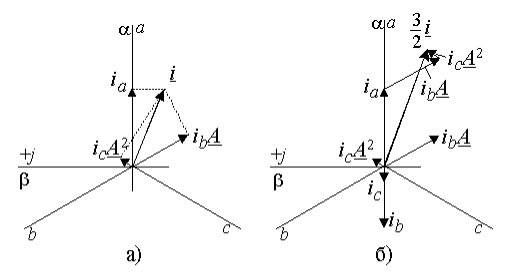
Рисунок 1.1 a
Если произвести построение вектора i , откладывая значения фазных токов ia, ib и ic на осях обмоток (рис. 1.1 б)), то суммарный вектор окажется в полтора раза больше того вектора, проекции которого соответствуют фазным токам.
Общий принцип векторного управления АД.
Общий принцип моделирования и построения системы управления АД заключается в том, что для этого используется система координат, постоянно ориентированная по направлению какого-либо вектора, определяющего электромагнитный момент. Тогда проекция этого вектора на другую ось координат и соответствующее ей слагаемое в выражении для электромагнитного момента будут равны нулю, и формально оно принимает вид, идентичный выражению для электромагнитного момента двигателя постоянного тока, который пропорционален по величине току якоря и основному магнитному потоку.
Выбор вектора, по направлению которого ориентируется координатная система, произволен и определяется только простотой и возможностью реализации модели АД. Например, в случае ориентации по потокосцеплению ротора Ψ2 = Ψ2d; Ψ2q = 0
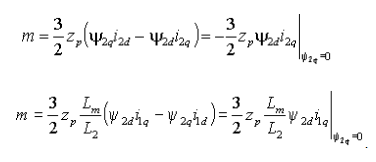
Очевидно, что первое выражение для управления короткозамкнутым АД не представляет интереса, т.к. включает практически неподдающийся измерению и управлению ток ротора, в то время как второе, позволяет при условии постоянства потокосцепления ротора управлять электромагнитным моментом изменением проекции тока статора на поперечную ось i1q.
Таким образом, для построения системы векторного управления АД нужно выбрать вектор, относительно которого будет ориентирована система координат, и соответствующее выражение для электромагнитного момента, а затем определить, входящие в него величины из уравнений для цепи статора и/или ротора.
На рисунке 1.2 приведена модель АД управляемого по напряжению статора и ориентированной по потокосцеплению ротора
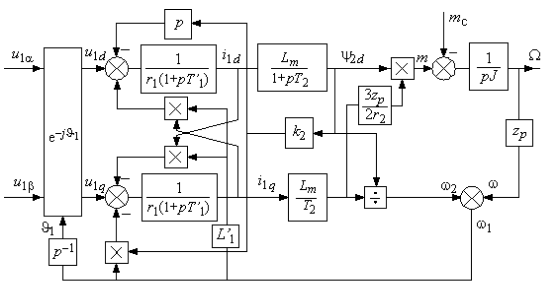
Рисунок 1.2 – Структурная схема АД
Список использованной литературы
- Ковач К.П., Рац И. Переходные процессы в машинах переменного тока.–М.-Л.: Госэнергоиздат, 1963.–744 с.
- Казовский Е.Я. Переходные процессы в электрических машинах переменного тока.–Л.: Изд. Академии наук СССР, 1962.–624 с.
- Постников И.М. Обобщенная теория и переходные процессы электрических машин. Учебник для вузов, изд. 2-е.–М.:
Высш. школа
, 1975.–319 с. - Копылов И.П. Математическое моделирование электрических машин: Учеб. для вузов, 2-е изд.–М.: Высш. шк., 1994.–318 с.
- Асинхронные электроприводы с векторным управлением/ В.В. Рудаков, И.М. Столяров, В.А. Дартау.–Л.: Энергоатомиздат, 1987.–136 с.
- Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями/ О.В. Слежановский, Л.Х. Дацковский, И.С. Кузнецов и др.–М.: Энергоатомиздат, 1983.–256с.
- Schцnfeld R. Digitale Regelung elektrischer Antriebe.–Berlin: Verl. Technik, 1987.–210 S.