Математическое моделирование 3-фазного асинхронного двигателя с использованием MATLAB / Simulink
Автор: Пунит Л. Ратнани, А. Г. Тосар
Автор перевода: Д.А. Шумилкин
Источник: Международный журнал современных инженерных исследований (IJMER)Международный журнал
Аннотация
Пунит Л. Ратнани А. Г. Тосар – Механическая энергия необходима как в повседневной жизни, так и в промышленности. Асинхронные двигатели играют очень важную роль в обоих мирах из-за низкой стоимости, надежной работы, надежной работы и низких эксплуатационных расходов. Для получения математической модели 3-фазного асинхронного двигателя теория систем отсчета была эффективно использована в качестве эффективного подхода. Динамические модели (математические модели) используются для лучшего понимания поведения асинхронного двигателя как в переходном, так и в стационарном состоянии. Динамическое моделирование устанавливает все механические уравнения для инерции, крутящего момента и скорости в зависимости от времени. Он также моделирует все дифференциальные напряжения, токи и магнитные потоки между неподвижным статором и движущимся ротором. Эта статья представляет пошаговую реализацию Matlab / Simulink индукционной машины с использованием преобразований оси dq0 переменных статора и ротора в произвольной системе отсчета.
1. Введение
Динамическое моделирование является одним из ключевых этапов валидации процесса проектирования системы Motordrive, которая устраняет ошибки проектирования и возникающие в результате ошибки при создании и тестировании прототипа. Динамическая модель асинхронного двигателя по прямой, квадратурной оси и оси нулевой последовательности может быть выведена из фундаментальных уравнений преобразования. Динамический анализ симметричных индукционных машин в произвольной системе отсчета интенсивно использовался в качестве стандартного подхода к моделированию, из которого затем может быть разработан любой конкретный режим работы. Matlab / Simulink имеет преимущество перед другими симуляторами машин в моделировании индукционной машины с использованием преобразования оси dq0. Обычно моделирование этих уравнений считается сложным, поэтому в данной статье они представлены в упрощенном виде. Преобразования, используемые на различных этапах, основаны на простых тригонометрических соотношениях, полученных в виде проекций на набор осей. Динамическая модель используется для получения переходных характеристик, уравнений малого сигнала и передаточной функции асинхронного двигателя. Динамические модели (математические модели) используются для лучшего понимания поведения асинхронного двигателя как в переходном, так и в стационарном состоянии.
Динамическое моделирование устанавливает все механические уравнения для инерции, крутящего момента и скорости в зависимости от времени. Он также моделирует все дифференциальные напряжения, токи и магнитные потоки между неподвижным статором и движущимся ротором. Эта математическая модель была сделана с использованием MATLAB / Simulink, которая будет представлять трехфазный асинхронный двигатель, включая преобразования трехфазной оси в d-q . Основным преимуществом MATLAB Simulink является то, что в электромеханической динамической модели ее можно реализовать простым способом и быстрее моделировать с использованием функциональных блоков.
2. Теоретические основы
А. Допущения.
При составлении математической модели 3-фазного асинхронного двигателя необходимо сделать несколько предположений. Они перечислены ниже:
беличья клетка.
Модель установившегося режима и эквивалентная схема асинхронного двигателя полезна для изучения характеристик машины в установившемся режиме. Это подразумевает, что все электрические переходные процессы игнорируются во время изменений нагрузки или частоты статора. Такие вариации возникают при применении с приводами с переменной скоростью. Приводы с регулируемой скоростью представляют собой преобразователь, питающийся от конечных источников, в отличие от вспомогательных источников, из-за ограничений номинальных характеристик переключателей и размеров фильтров. Это приводит к их неспособности обеспечить большую переходную мощность. Следовательно, нам необходимо оценить динамику приводов с переменной скоростью, питаемых от преобразователя, чтобы оценить адекватность переключателей преобразователя и преобразователей для заданного числа двигателей и их взаимодействие для определения отклонений токов и крутящего момента в преобразователе и двигателе.
B. Эквивалентная схема асинхронного двигателя.
Уравнения напряжения и крутящего момента, которые описывают динамическое поведение асинхронного двигателя, меняются во времени. Он успешно используется для решения таких дифференциальных уравнений и может включать некоторую сложность. Смена переменных может быть использована для уменьшения сложности этих уравнений путем исключения всех нестационарных индуктивности, обусловленные электрическими цепями в относительном движении, из уравнений напряжения машины[1,2,3,4]
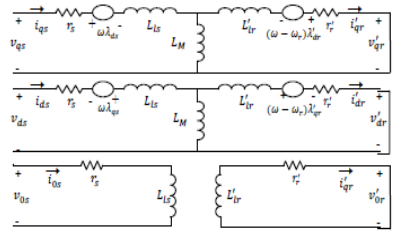
Рис. 1 Схема замещения dq0 асинхронного двигателя
На рисунке выше показана эквивалентная схема dq0 асинхронного двигателя. Схема содержит различные изменяющиеся во времени индуктивности, которые должны быть смоделированы для анализа динамических характеристик 3-фазного асинхронного двигателя.
3. Модель асинхронного двигателя
A. Обобщенная концепция в произвольной системе отсчета.
Система отсчета очень похожа на платформы наблюдателей, поскольку каждая из платформ дает уникальное представление об имеющейся системе, а также значительно упрощает системное уравнение. Например, для целей управления желательно иметь системные переменные в виде величин постоянного тока, хотя фактические переменные являются синусоидальными. Это может быть достигнуто путем вращения системы отсчета с той же угловой скоростью, что и у синусоидальной переменной. Поскольку системы отсчета движутся с угловой скоростью, равной угловой скорости, равной угловой частоте синусоидальной подачи, так что дифференциальная скорость между ними уменьшается до нуля, в результате чего синусоидальный сигнал ведет себя как сигнал постоянного тока от систем отсчета. Таким образом, перемещая эту полосу, становится проще разработать уравнение слабого сигнала из нелинейных уравнений, поскольку рабочая точка описывается только значениями постоянного тока; это тогда приводит к линеаризованной системе вокруг рабочей точки. Таких преимуществ много от использования системы отсчета. вместо того, чтобы получать преобразование для каждой конкретной системы отсчета; выгодно получить общее преобразование для произвольной вращающейся системы отсчета. Тогда любая конкретная модель опорного кадра может быть получена путем замены соответствующей скорости кадра и положения в обобщенной эталонной модели.
Б. Трехфазное в двухфазное преобразование.
Динамическая модель асинхронного двигателя может быть получена, если изучить эквивалентность между трехфазной и двухфазной машиной. Эквивалентность основана на количестве MMF, произведенного в двухфазной и трехфазной обмотках, при равных значениях тока. Предполагая, что каждая из трехфазных обмоток имеет Ns витков на фазу и равные величины токов, двухфазная обмотка будет иметь 3/2 витка на фазу для равенства MMF. Значения MMF для осей d и q определяются разрешением трехфазной MMF вдоль осей d и q. Общий термин, число витков отменяется по обе стороны уравнений, оставляя позади текущие равенства. Трехфазные напряжения статора асинхронной машины в сбалансированных условиях можно выразить как[2,3,4]
Va = √2Vrms sin(ωt)
Vb = √2Vrms sin(ωt - 2π/3)
Vc = √2Vrms sin(ωt + 2π/3)
Здесь Va,Vb & Vc – три линейных напряжения.
Связь между αβ и abc следующая
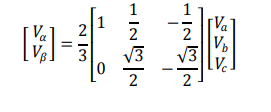
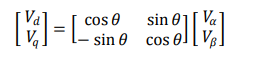
Тогда напряжение прямой и квадратурной осей
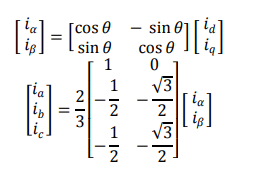
Мгновенные значения токов статора и ротора в трехфазной системе в конечном итоге рассчитываются с использованием следующее преобразование;
C. Уравнения флюсовых связей и модели Simulink.
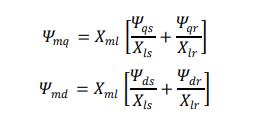
Динамическая модель асинхронного двигателя в произвольной системе отсчета может быть представлена с использованием потоковых связей в качестве переменных. Это включает сокращение числа переменных в динамических уравнениях, что значительно облегчает их решение с использованием аналоговых и гибридных компьютеров. Даже когда напряжения и токи являются прерывистыми, флюс-связи являются непрерывными. Это дает преимущество дифференциации этих переменных с численной стабильностью. Кроме того, представление связей потока используется в приводах двигателей для выделения процесса разъединения каналов потока и крутящего момента в индукционной и синхронной машине. Различные уравнения сцепления выражаются как[4]
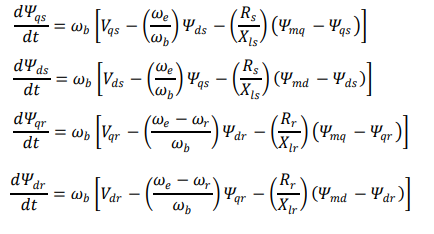
Где
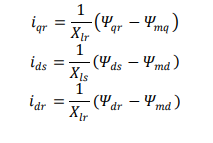
Затем подставляя значения потоковых связей, чтобы найти токи,

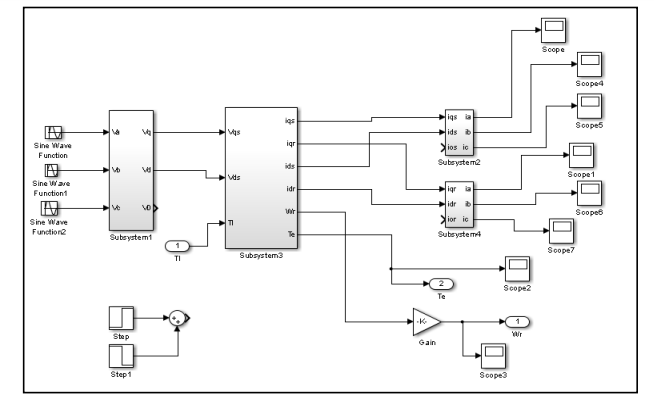
Рис. 2 Обзор полной динамической модели в среде Matlab / Simulink
На основании приведенных выше уравнений электромагнитный крутящий момент и скорость вращения ротора можно определить следующим образом:
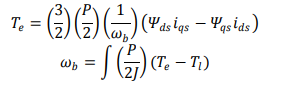
С P = нет полюсов машины
Te = развивается электромагнитный момент
4. Результаты Matlab / Simulink
В этой моделируемой модели был испытан асинхронный двигатель мощностью 3 л.с. Результаты моделирования приведены для первого асинхронного двигателя со следующими характеристиками: Входные параметры[5]:
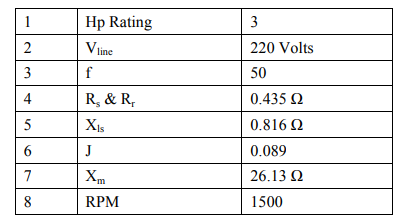
Различные рабочие характеристики асинхронного двигателя потребляли электромагнитный крутящий момент, частота вращения ротора и токи статора и ротора в каждой из трехфазных обмоток.
А. Развивается электромагнитный момент.
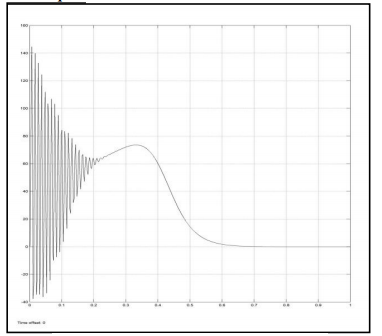
Рис. 3 Развиваемый электромагнитный момент
B. Токи статора в фазах A, B и C.
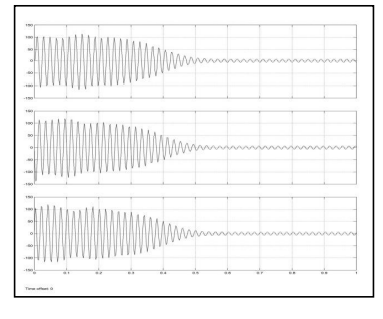
Рис. 4 Токи статора в фазах A, B и C
C. Ток ротора в каждой фазе A, B и C.
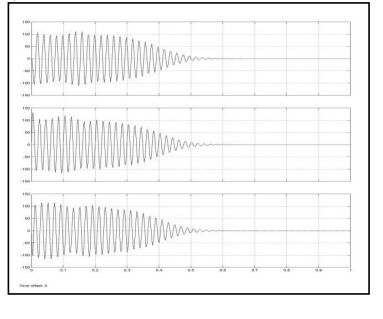
Рис. 5 Токи ротора в фазах A, B и C
D. Скорость ротора в единице с базовой скоростью 1500 об / мин.
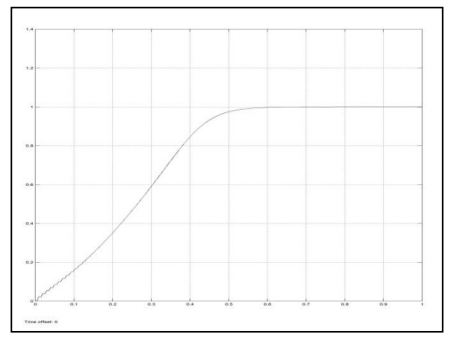
Рис. 6 Скорость ротора
5. Заключение
В данной работе реализовано и динамическое моделирование трехфазного асинхронного двигателя с использованием Matlab / Simulink представлен в пошаговой манере. Модель была испытана асинхронным двигателем мощностью 3 л.с.[5,6] Имитированная машина дала удовлетворительный отклик с точки зрения характеристик крутящего момента и скорости. это приходит к выводу, что Matlab / Simulink является надежным и сложным способом анализа и прогнозирования поведения асинхронные двигатели с использованием теории систем отсчета.
Список использованной литературы
- P. C. Krause, O. Wasynczuk, S. D. Sudhoff “Analysis of Electric Machinery and Drive Systems”, IEEE Press, A John Wiley & Sons, Inc. Publication Second Edition, 2002.
- P.C. Krause and C. H. Thomas, “Simulation of Symmetrical Induction Machinery”, IEEE Transaction on Power Apparatus and Systems, Vol. 84, November 1965, pp. 1038-1053.
- P. C. Krause, “Analysis of Electric Machinery”, McGraw-Hill Book Company, 1986.
- R. Krishnan, “Control, Modeling and Analysis of Electrical Drives”,
- Bimal K. Bose, “Modern power electronics and drives”.
- M. H. Rashid, “Power Electronics; circuits, devices, and applications”.
- M Ozaki, Y. Adachi, Y. Iwahori, and N. Ishii, Application of fuzzy theory to writer recognition of Chinese characters, International Journal of Modelling and Simulation, 18(2), 1998, 112-116.