Исследование режимов работы электромеханической системы на базе синхронного электродвигателя с постоянными магнитами
Авторы: Чермалых А.В., Пермяков В.Н., Майданский И.Я.
Источник: Национальный технический университет Украины Киевский политехнический институт
Аннотация
Чермалых А.В., Пермяков В.Н., Майданский И.Я.– В работе рассматривается синхронный двигатель с постоянными магнитами в составе электропривода с частотным регулированием. В качестве предмета исследования рассмотрены режимы работы электромеханической системы, динамические процессы и энергетические показатели. Цель работы состоит в синтезе виртуальной модели, которая позволяет получить скоростные и нагрузочные диаграммы относительно характерных возможных режимов функционирования системы,а также временные графические зависимости изменения мгновенных значений потребляемых из сети полной, активной и реактивной мощностей, коэффициента мощности. Это позволяет оценить характер протекания электромагнитных и энергетических процессов в синхронном двигателе с постоянными магнитами.
Вступление.
Тенденцией развития автоматизированного электропривода на современном этапе является переход к регулируемым приводам переменного тока, в том числе на основе синхронных двигателей с постоянными магнитами и частотным управлением. Практически во всех литературных источниках отмечается преимущество: отсутствие у таких машин колец на валу и щеточного контакта для подачи возбуждения. Из этого следуют основные достоинства: упрощение конструкции, снижение потерь, уменьшение размеров. Вместе с тем, при рассмотрении синхронного электропривода на базе машины с постоянными магнитами возникает задача определения законов частотного регулирования, обеспечивающих наилучшие режимы в отношении устойчивости, быстродействия, энергетических и других показателей. В этой связи использование прикладных пакетов компьютерных программ для анализа режимов работы и оценки эффективности применения синхронных электроприводов является целесообразным и необходимым, особенно на стадии проектирования электромеханической системы при решении вопроса выбора той или иной схемы на основе многокритериального анализа вариантов.
Входные данные и методы.
В работе предлагается в качестве инструмента использовать метод виртуального моделирования, который позволяет исследовать динамику и электромагнитные процессы, а также оценить энергетические характеристики всей системы электромеханической системы на базе синхронного двигателя с постоянными магнитами.
Виртуальная модель синхронного электропривода с частотным регулированием (рис.1) синтезирована в соответствии с наиболее распространенным вариантом низковольтного преобразователя частоты с промежуточным звеном постоянного тока
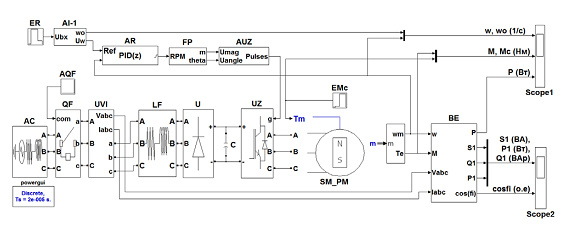
Рис. 1 Виртуальная модель синхронного электропривода
Силовой канал электропривода собран с помощью виртуальных блоков пакета расширения SimPowerSystems и содержит следующие основные элементы: AC – трехфазная питающая сеть переменного тока; QF – силовой автоматический выключатель с системой управления AQF ; UVI – система датчиков фазных напряжений и токов; LF – входной фильтр электромагнитной совместимости системы с сетью; U – выпрямитель на диодах создает цепь постоянного тока; C – конденсаторный фильтр обеспечивает режим источника напряжения; UZ – автономный инвертор напряжения на IGBT модулях; SM_PM – синхронный двигатель с постоянными магнитами.
Управляющий канал электромеханической системы реализован с помощью блоков основного пакета Simulink: AUZ – система ШИМ управления автономным инвертором; FP – функциональный преобразователь; ER – цифровой ПИД-регулятор; AI-1 – цифровой задатчик интенсивности первого порядка; ER – блок задания скоростной диаграммы; EMc– блок задания диаграммы нагрузочного момента.
Задаваемые величины требуемых угловых скоростей и моментов статического сопротивления соответствуют следующему алгоритму:
Осциллограф Scope1 позволяет фиксировать протекание динамических процессов в рассматриваемой синхронной системе. Полученные диаграммы заданной и фактической скоростей, а также диаграммы изменения электромагнитного и статического моментов (рис.2) соответствуют рассматриваемому периоду моделирования. Кроме того,существует такжевозможность отображения в отдельном окне временного графика мгновенных значений механической мощности на валу двигателя.
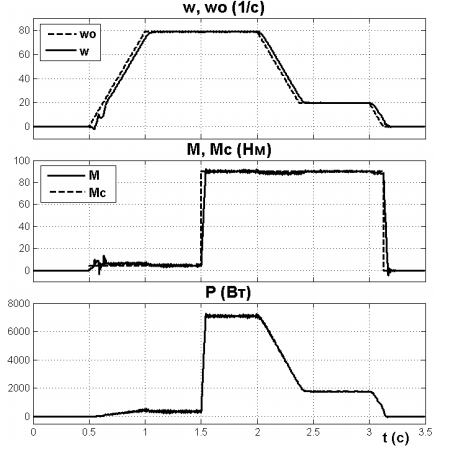
Рис. 2 Диаграммы динамических процессов синхронной системы
Энергетическими характеристиками системы электропривода являются зависимость активной, реактивной и полной потребляемой мощности от нагрузки на валу двигателя. Кроме того, очень важными являются еще два показателя: коэффициент мощности и коэффициент полезного действия.
Основные энергетические показатели синхронного двигателя с постоянными магнитами и частотным регулированием определяются подсистемой BE, основным элементом которой является блок Active & Reactive Power. Этот блок из трехфазной системы фазных напряжений и токов выделяет активную и реактивную составляющую полной мощности, затем по известным зависимостям определяются полная мощность и коэффициент мощности.
Энергетические показатели в течение периода моделирования фиксируются с помощью осциллографа Scope2 (рис.3) и для удобства наблюдения объединены в одном окне относительно мощностей и в отдельном окне отображен график изменения коэффициента мощности.
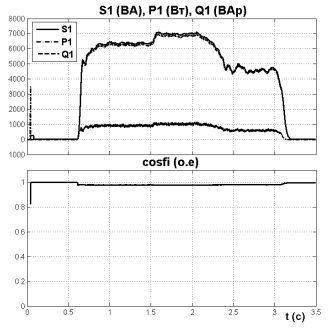
Рис. 3 Временные зависимости энергетических показателей
Диаграммы мощностей наглядно отражают поведение системы в соответствии с рассматриваемым алгоритмом работы модели.
Результаты. Обсуждение и анализ.
Полученная в результате моделирования динамических процессов скоростная диаграмма показывает достаточно высокую точность отработки заданной скорости и быстродействие на всем периоде моделирования с небольшим запаздыванием в переходных режимах. Необходимо отметить, что при скачкообразном изменении нагрузки привод удерживает скорость практически без просадки.
Диаграмма моментов иллюстрирует наличие небольших динамических моментов, а также выполнение основного уравнения движения электропривода на всех участках моделируемого цикла.
Графики мощностей отображают динамику изменения полной мощности и ее составляющих на всех характерных участках скоростной диаграммы. При этом потребление реактивной мощности незначительно, что предопределяет высокое значение коэффициента мощности cos φ = 0,98, что подтверждается соответствующим графиком.
Заключение и выводы.
Была синтезирована виртуальная модель частотно-регулируемого электропривода с синхронным двигателем на постоянных магнитах, которая по своей структуре полностью соответствует построению реальных систем, как по силовому каналу, так и относительно системы управления. Были получены диаграммы скорости, моментов и активной механической мощности на валу двигателя, подтверждающие высокие динамические показатели системы. Полученные временные графики мгновенных значений энергетических показателей позволяют отметить высокий уровень энергоэффективности синхронного электропривода с частотным регулированием на базе двигателя с постоянными магнитами.
Список использованной литературы
- Чермалых А.В. Исследование динамики и энергетических характеристик систем электропривода с помощью виртуальных моделей // Вісник Кременчуцького державного політехнічного університету. – 2005. – Вип. 4/2005 (33). – С. 142 – 147.
- Чермалых В.М., Чермалых А.В., Майданский И.Я. Исследование динамики и энергетических характеристик частотно-регулируемого синхронного электропривода методом виртуального моделирования // Вісник Кременчуцького державного політехнічного університету. – Кременчук: КДПУ, 2009. – Вип. 4/2009 (57) частина1. – С. 112 – 118.
- Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ИД Питер, 2007. – 288 с.
- Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с.