Векторное управление электроприводами переменного тока
Авторы:В.М. Утенков, П.М. Чернянский, С.Н. Борисов, Г.Н. Васильев, Л.И. Вереина,В.С. Иванов, Д.В. Иванов, В.К. Москвин, Н.С. Николаева, Ю.В. Никулин, В.М. Скиба, А.Г. Ягопольский
Источник: Проектирование автоматизированных станков и комплексов :учебник : в 2 т. / под ред. П. М. Чернянского. – 2-е изд., испр.–М. : Изд-во МГТУ им. Н. Э. Баумана, 2014.
Аннотация
В.М. Утенков, П.М. Чернянский, С.Н. Борисов, Г.Н. Васильев, Л.И. Вереина, В.С. Иванов, Д.В. Иванов, В.К. Москвин, Н.С. Николаева, Ю.В. Никулин, В.М. Скиба, А.Г. Ягопольский– изложены основы проектирования кинематиче- ской схемы, несущей системы, привода, надежности и устойчивости динамической системы, а также художественного проектирования станков.
ОБЩИЕ СВЕДЕНИЯ И КИНЕМАТИКА СТАНКОВ.
Металлорежущий станок – это технологическая машина, предназначенная для обработки материалов резанием с целью получения деталей заданной
формы и размеров (с требуемыми точностью и качеством обработанной поверхности). На станках обрабатывают заготовки не только из металла, но и из
других материалов, поэтому термин металлорежущий станок
является
условным.
ПРОЕКТИРОВАНИЕ СТАНКОВ
Станки, станочные модули, станочные системы являются элементами технологической системы, под которой следует понимать совокупность функционально взаимосвязанных средств технологического оснащения, предметов производства и исполнителей для осуществления в регламентированных условиях производства заданных технологических процессов или операций. Ядром технологической системы является станок, обеспечивающий точность перемещения формообразующих узлов. Станок, его технический уровень и совершенство узлов и механизмов определяют эффективность взаимодействия всех элементов технологической системы. Конструкции и компоновки станков чрезвычайно разнообразны, однако все они содержат типовые подсистемы, узлы, механизмы и элементы.
Структурная схема станка включает систему управления с приводами рабочих органов и несущую систему: формообразующие узлы, механизмы вспомогательных функций и корпусные детали. Станок входит в станочный модуль, включающий системы верхнего уровня: управления, инструментальную, транспортную и складирования.
Исполнительные движения в станке – это движения инструмента и заготовки, необходимые для осуществления полного цикла обработки, т. е. формообразования и вспомогательные. Первые связаны с непосредственным осуществлением процесса резания, вторые необходимы для транспортировки заготовок и инструмента в позицию обработки.
ПРИВОДЫ СТАНКОВ
Этапы проектирования приводов станков с ЧПУ
Проектирование станочных приводов с учетом их динамики состоит из нескольких этапов, поэтому его можно представить как процесс последова- тельного наращивания структуры привода.
Построение структуры привода начинают с исполнительного механизма ИМ, который состоит из электродвигателя ЭД, редуктора Р и нагрузки Н. К исполнительному механизму добавляют усилитель мощности УМ. Силовой привод может включать в себя жесткую обратную связь ЖОС, чаще всего механическую.
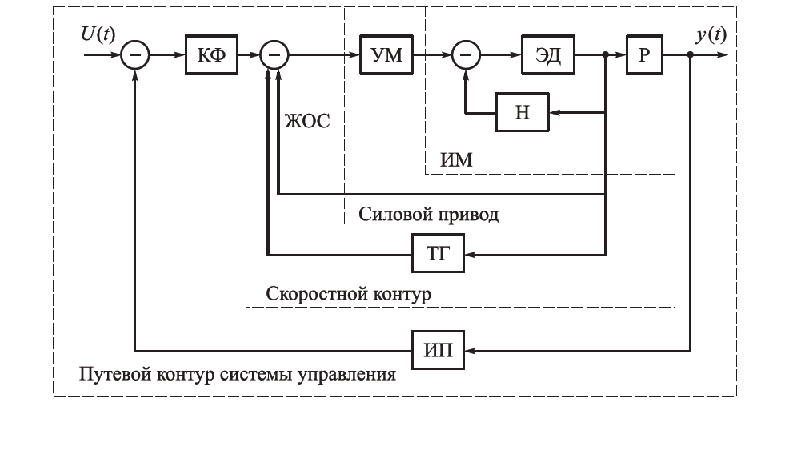
Затем строят скоростной контур с использованием измерительнопреобразовательного устройства на базе датчика скорости. Далее разрабатывают путевой контур, который замыкается измерительным преобразователем ИП перемещения или положения рабочего органа технологической машины.
Список использованной литературы
- Борисов С.Н. Методические указания к лабораторным работам по курсу
Дизайн станков
. М.: Изд-во МГТУ им. Н.Э. Баумана, 1993. 72 с.Васильев Г.Н. Автоматизация проектирования металлорежущих станков:Учеб. пособие. М.: Машиностроение, 1987. 280 с. - Войненко В.М., Мунипов В.М. Эргономические принципы конструирования. Киев: Тэхнiка, 1988. 199 с.
- Григорьянц А.Г., Шиганов И.Н. Оборудование и технология лазерной обработки материалов: Учеб. пособие. М.: Высш. шк., 1990. 159 с.Дальский A.M., Суслов А.Г. Научные основы технологии машиностроения.М.: Машиностроение, 2002. 684 с.
- Детали и механизмы металлорежущих станков. В 2 т. / Д.Н. Решетов,В.В. Каминская, А.С. Лапидус и др.; под ред. Д.Н. Решетова. М.: Машиностроение, 1972. Т. 1. 664 c., Т. 2. 520 с.
- Кутин А.А. Создание конкурентоспособных станков. М.: Изд-во
Станкин
, 1996. 202 с. - Лещенко В.А. Гидравлические следящие приводы станков с программным управлением. М.: Машиностроение, 1975. 288 с.
- Металлорежущие станки: Учебник для вузов / В.Э. Пуш, В.Г. Беляев,А.А. Гаврюшин и др.; под ред. В.Э. Пуша. М.: Машиностроение, 1986. 574 с.
- Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов: Учебник для вузов. М.: Машиностроение, 1990. 304 с.
- Пановко Я.Г. Введение в теорию механических колебаний. М.: Наука,1980. 270 с.
- Проектирование металлорежущих станков и станочных систем. Справочник-учебник. В 3 т. Т. 1: Проектирование станков / А.С. Проников,О.И. Аверьянов, Ю.С. Апполонов и др.; под общ. ред. А.С. Проникова. М.:Изд-во МГТУ им. Н.Э. Баумана: Машиностроение, 1994. 444 с.
- Проектирование металлорежущих станков и станочных систем: Справочник-учебник. В 3 т. Т. 2: Расчет и конструирование узлов и элементов станков / А.С. Проников, Е.И.Борисов, В.В.Бушуев и др.; под общ. ред. А.С. Проникова. М.: Изд-во МГТУ им. Н.Э. Баумана: Машиностроение, 1995. 371 с.
- Проников А.С. Надежность машин. М.: Машиностроение, 1978. 595 с.
- Сандаков М.В., Вегнер В.А., Вегнер М.К. Таблицы для подбора шестерен.6-е изд., доп. М.: Машиностроение, 1988. 571 с.
- Сомов Ю.М. Композиция в технике. 3-е изд., перераб. и доп. М.: Машиностроение, 1987. 288 с.