Аннотация
Шохин В.В., Пермякова О.В., Кисель Е.С. ИССЛЕДОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ ПРОКАТНОЙ КЛЕТИ. Проводится моделирование электромеханической системы реверсивной клети прокатного стана с учетом зазоров в механических передачах и упругих связей.
Введение
Динамические режимы работы реверсивных клетей прокатных станов оказывают существенное влия- ние на надежность и долговечность электрического и механического оборудования, так как наличие зазоров и упругих связей в механических передачах приводит к появлению значительных динамических моментов. Проводится исследование работы реверсивной клети листового стана горячей прокатки 2500 ОАО «ММК». Привод валков клети индивидуальный. Каждый валок приводится во вращение двигателем постоянного тока, который питается от реверсивного тиристорного преобразователя. Система автоматического регулирования скорости (САРС) двухзонная с зависимым ослаблением поля в функции ЭДС якоря двигателя (рис. 1). САРС электроприводов нижнего и верхнего валков одинаковы.
Системы регулирования выполнены с использованием принципа подчиненного регулирования коор- динат [1]. Настройка контуров регулирования проведена по модульному оптимуму, при этом в контурах скорости и ЭДС применены корректирующие устройства для сохранения настройки этих контуров неиз- менными при ослаблении потока возбуждения двигателей. В модели учтена нелинейность кривой намагничивания двигателя. Передача крутящего момента на верхний валок осуществляется через вал, упругость которого учитывается при моделировании работы клети [2]. Нижний валок связан с двигателем через редуктор, при этом также рассматриваются упругие свойства механической передачи. При моделировании учитываются возможные зазоры в элементах механических передач.
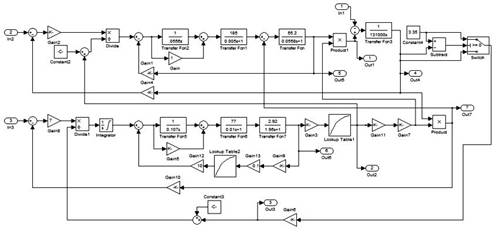
Рис. 1. Модель электропривода валка
МЕТОДЫ ИССЛЕДОВАНИЯ
Моделирование работы электропривода осущест-вляется с помощью пакета SIMULINK программной среды MATLAB [3]. Составлена модель двухзонной САРС (см. рис. 1), которая в дальнейшем представляется в виде подсистемы общей структуры электромеханической системы. Настройка электропривода характеризуется ос-циллограммой (рис. 2), на которой показаны ток (1), скорость (2), ЭДС (3), магнитный поток (4) и момент (5) электродвигателя при его разгоне до скорости выше номинальной и набросе нагрузки.
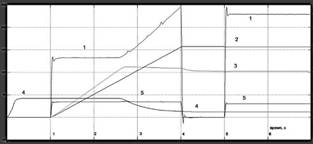
Рис. 2. Осциллограммы к модели электропривода валка
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ
Для оценки адекватности составленной модели электромеханической системы клети проводился рас-чет переходных процессов в различных режимах рабо-ты, при этом параметры механической части выбирались таким образом, чтобы проявилась наглядность действия исследуемых факторов – упругости вала и зазора в механической передаче. Исследовались пере-ходные процессы в электромеханической системе при скачкообразном увеличении и снижении (через 0,5 с) сигнала задания скорости валка, а также при увеличении и снижении (через 1 с) момента нагрузки на валок. С целью сравнения результатов моделирования проведено исследование работы электромеханической системы верхнего и нижнего валков при их жесткой связи между собой. Структурная схема для этого слу-чая представлена на рис. 3, а осциллограммы момента и скорости двигателей – на рис. 4. На осциллограммах сверху вниз показаны скорость верхнего валка, ско-рость нижнего валка, момент двигателя верхнего валка, момент двигателя нижнего валка.
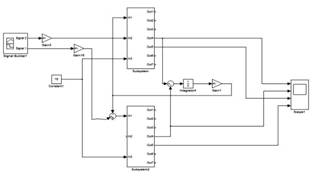
Рис. 3. Модель жесткой связи валков
Из осциллограмм видно, что при увеличении задания скорости на верхний валок нижний валок также вращается, при этом момент двигателя нижнего валка отрицательный, а режим работы двигателя – рекуперативный. При набросе нагрузки на нижний валок от-клонения скорости двигателей отрицательные, т.е. скорости одновременно снижаются. Моменты двигателей верхнего и нижнего валков при этом возрастают. Осциллограммы на рис. 6 показывают работу электропривода одного валка при наличии упругой связи и зазора в механической передаче между двигателем и валком. На осциллограмме изображены (сверху вниз) скорость вращения двигателя, скорость вращения валка и момент двигателя. Структурная схема для этого случая представлена на рис. 5.
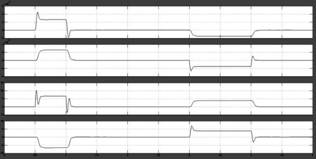
Рис. 4. Работа клети при жесткой связи валков
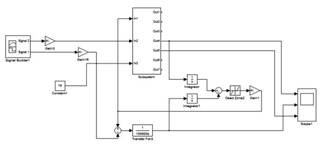
Рис. 5. Модель электропривода валка с упругостью и зазором
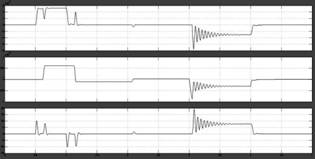
Рис. 6. Работа электропривода валка с упругостью и зазором
Рассматриваются переходные процессы момента и скорости двухмассовой электромеханической системы при набросе нагрузки со стороны валка. Видно, что при увеличении скорости двигателя из-за зазора в механической передаче валок начинает вращаться через некоторый промежуток времени. В момент закрытия зазора происходит ударное увеличение момента на валу двигателя и скорость его снижается, но затем под действием работы САРС и увеличения тока двигателя скорость восстанавливается, происходит вращение валка. После снятия сигнала задания скорости двигатель останавливается, но остановка валка происходит через некоторое время, при этом также происходит удар в механической передаче, что приводит к кратковременному возрастанию скорости двигателя и отрицательного момента. Некоторое время валок еще вращается с отрицательной скоростью, при этом двигатель не вращается, но после закрытия зазора система приходит в начальное состояние. При набросе нагрузки на валок его скорость сразу же начинает снижаться, а через некоторое время снижается скорость двигателя и возрастает его момент, при этом для заданных параметров механической части электромеханической системы и параметров электропривода наблюдается колебательный переходный процесс. Общая модель электромеханической системы верхнего и нижнего валков прокатной клети с учетом зазоров и упругостей механических передач и жесткой связи верхнего и нижнего валков показана на рис. 7.
Рассмотрены переходные процессы в этой системы (рис. 8) при разгоне и торможении привода и набросе и сбросе нагрузки. Порядок переменных на осциллограммах (сверху вниз): скорость вращения двигателя верхнего валка, скорость вращения верхнего валка, задание момента статического на оба валка, угол поворота вала двигателя, угол поворота верхнего валка, скорость двигателя нижнего валка, скорость нижнего валка, момент двигателя нижнего валка, угол поворота вала двигателя нижнего валка, угол поворота нижнего валка.На осциллограммах видно, что изменение скорости валков происходит после закрытия зазоров в механических передачах, при этом из-за резкого изменения нагрузки в электроприводах валков наблюдаются броски тока, свидетельствующие об ударах в механических передачах. При набросе нагрузки со стороны валков происходит снижение их скоростей, но после закрытия зазоров возрастают токи двигателей, наблюдается просадка скорости в электроприводе, так как выполнена настройка контура скорости по модульному оптимуму. При набросе нагрузки переходный процесс колебательный.
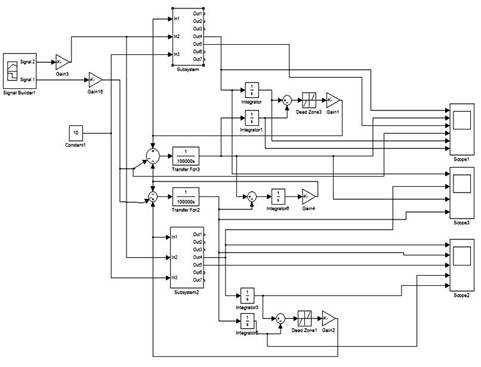
Рис. 7. Модель электропривода клети
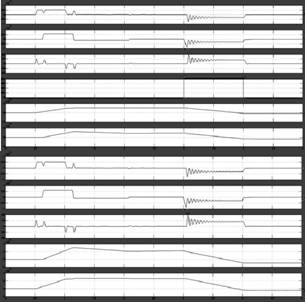
Рис. 8. Осциллограммы работы клети
ЗАКЛЮЧЕНИЕ И ОБСУЖДЕНИЕ
Анализ представленных предварительных результатов моделирования показывает, что разработанные модели адекватно описывают процессы в рассматриваемой электромеханической системе и позволяют провести широкие исследования работы электромеханической системы реверсивной прокатной клети с учетом упругих связей и зазоров в механической передаче. С помощью моделей можно проанализировать влияние параметров механической части электромеханической системы и параметров настройки электроприводов клетей на работу прокатной клети.
Список использованной литературы
1. Системы управления электроприводов: учебник для вузов / В.М.Терехов, О.И.Осипов; под ред.В.М.Терехова. М.: Издательский центр «Академия», 2005. 304 с.
2. Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода: учеб. пособие для вузов. М.: Энергия, 1979. 616 с.
3. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystem и Simulink. М.: ДМК Пресс; СПб.: Питер, 2008. 288 с.