Основу любого аддитивного производства составляют программируемые мехатронные устройства (3D-принтеры), функционирование которых может быть реализовано по различным кинематическим схемам. Наибольшее распространение получили схемы манипуляторов, работающих в декартовой системе координат. Достоинством таких манипуляторов является простата программирования, вследствие линейного перемещения рабочего органа, не требующего дополнительных преобразований.
Вместе с тем, в силу разных условий, используются и другие кинематические схемы манипуляторов, представляющие собой многозвенные механизмы, состоящие из нескольких стержней. Один конец первого стержня закреплен в шарнире и может в нем поворачиваться, остальные стержни соединены последовательно также с помощью шарниров. На конце последнего стержня находится рабочий орган.
Применительно к 3D-принтеру кинематическая схема часто представляется в виде двухзвенного манипулятора (рисунок 1) с различным расположением электрических приводов.
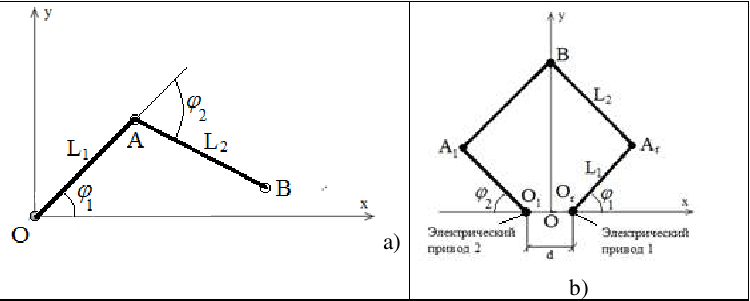
Рисунок 1 – Схема двухзвенного манипулятора ( а – с расположением приводов в узлах звеньев, b – с расположением приводов в основании)
В докладе приводятся математические и программные модели рассматриваемых кинематических схем 3D-принтеров.