Аннотация
Установлены закономерности, позволяющие имитировать процесс взаимодействия колес тележек с направляющими, что позволяет обоснованно выбирать скорость движения грузовой единицы, ее массу и размеры стеллажей.
Ключевые слова
Математическая модель, паллета, стеллаж, челночная тележка, направляющие.
Обоснование параметров стеллажных систем хранения паллет
Основной проблемой стеллажных паллетных систем хранения является низкая степень заполнения складских площадей из–за большого количества проходов и проездов для погрузочной техники. Повысить степень заполнения стеллажных систем возможно за счет применения набивных стеллажей с челночными тележками, перемещающимися по направляющим. При этом важно установить взаимосвязь между ходовыми параметрами тележек и направляющими, что позволит обоснованно выбирать массу грузовой единицы (паллеты) и стеллажа.
Вопросам проектирования транспортных систем для технологических комплексов посвящены работы [1 – 5]. Создание подобных систем занимался ряд предприятий и организаций, среди которых следует отметить ПромРесурс, Складекс, Сomitas, Mecalux, Savoye. Однако в указанных работах отсутствуют расчетные схемы и математические модели, позволяющие обосновать параметры челночных тележек и их направляющих как составной части стеллажной системы хранения.
Особенность взаимодействия челночной тележки с направляющими заключается в том, что благодаря одинаковому шагу крепления по длине транспортирования, жесткость направляющих в поперечном направлении периодически меняется. Во время движения тележки с постоянной скоростью это может быть причиной возникновения параметрических резонансов. В результате таких явлений направляющие и колеса тележек подвергаются значительным деформациям и разрушаются. При этом колеса тележки могут выйти из направляющих, что приведет к аварии и порче хранимой продукции.
В общем случае теория перемещения челночной тележки по направляющим основана на рассмотрении уравнений малых поперечных колебаний материальной точки с массой m (массы тележки), что движется с постоянной скоростью V0 вдоль балки (направляющих), которая имеет изгибную жесткость EJ и расположена n упругих опорах [ 6 – 9]. Считаем, что каждая опора имеет одинаковый коэффициент жесткости C0 , а сами опоры находятся на расстоянии друг от друга h . Количество опор n предполагается достаточно большим, балка считается неразрезной, а массу балки не учитываем. Расчетная схема движения челночной тележки изображена на рис.1.
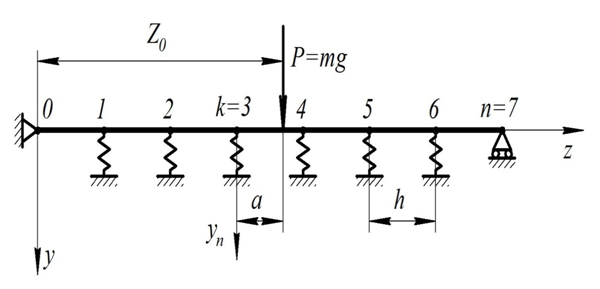
Рисунок 1 – Расчетная схема движения челночной тележки
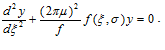
Задача состоит в определении областей устойчивого движения рассматриваемой массы относительно ее колебаний в поперечном направлении (вдоль оси y). С учетом принятых ограничений уравнение поперечных колебаний массы записывается в форме

где C(z0) – функция поперечной жесткости балки в точке с координатой z = (z0) в принятой на рис.1 системе координат, то есть эта функция представляет собой коэффициент жесткости балки, определяемый отношением силы P к прогибу yn вызываемой этой силой. При большом количестве опор период изменений этой функции будет T = h/V0.
Выражение (1), принадлежит к уравнениям типа Хилла, а поэтому при определенных сочетаниях коэффициентов уравнений, система может иметь параметрический резонанс. Границы значений указанных коэффициентов возможно определить с помощью теории Флоке – Ляпунова.
Для определения функции C(z0) составим уравнение упругой линии перемещений продольной оси балки, опирающейся на упругие опоры и нагруженной сосредоточенной силой P

где δ1(z - z0) – импульсная функция Дирака
kh (k = 1,2,...,n - 1) – координаты упругих опор
Решив уравнение (2) для z = (z0), получим прогиб балки yn = y(z0) и тогда искомую функцию жесткости можно представить как C(z0) = P/yn = C0f(ξ,σ), где f(ξ,σ) – функция, которая в силу ее периодичности, определяется на интервале ξ = a/h = V0t/h ∈ [0,1], а σ – безразмерный параметр подобия, равен σ = C0h3/(6EJ).
Графическое решение уравнения (2) показано на рис.2.
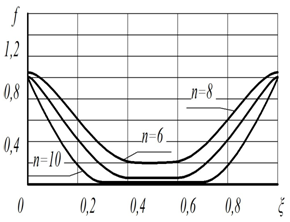
Рисунок 2 – Графики изменения коэффициента жесткости направляющих по длине пролета
Функция f(ξ,σ) может быть представлена в виде ряда Фурье

где qk – коэффициенты Фурье.
Тогда f(ξ,σ) = q0 + q1cos(2πξ) и выражение (1) будет

Для уравнения (3) найдем два независимых решения y = φ1(ξ) и y = φ2(ξ) с начальными условиями φ1(0) = 0 и φ2(0) = 1, φ2(0) = 0. При этом учитываем, что согласно теории Флокс – Ляпунова параметрический резонанс наступает тогда, когда квадратное уравнение λ2 - λ1[φ1(1) + φ(1)] + 1 = 0 имеет действительные корни.
Обозначим μ = ω/ν , где ω – собственная частота челночной тележки, которая равна ω = √(C0/mfср); ν – частота периодического возбуждения, соответствующая циклической частоте чередования упругих опор балки, ν = 2πV0/h; fср = q0 – среднее интегральное значение периодической функции f(ξ,σ), которое равно

На основании этого имеем
Графическое решение этого уравнения приведено на рис.3. Отсюда следует, что для малых значений первые две области резонанса подобны областям известной диаграммы Айнса – Стретта.
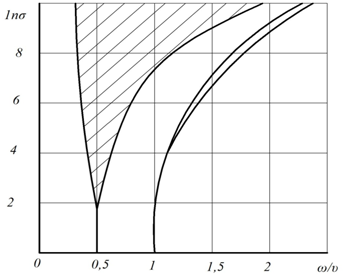
Рисунок 3 – Области параметрических резонансов при поперечных колебаниях челночной тележки
При увеличении σ крайняя слева область резонанса относительно μ = ω/ν существенно расширяется. Расширение области и смещение границы вправо требует уменьшения безопасной скорости движения V0 челноковой тележки. При этом первая резонансная область представляет наибольшую опасность для рассматриваемой системы, причем правая ее граница является предельным порогом. Связано это с тем, что рассматриваемая система не является в строгом смысле линейной, а включает в себя нелинейность типа «зазор».
Выводы
Разработанные математические модели движения челночной тележки по направляющим стеллажа позволяют имитировать процесс взаимодействия колес челночной тележки с направляющими. Указанные модели могут быть использованы для анализа динамических нагрузок на стеллажные системы, формирующихся во время перемещения паллеты с грузом. В итоге получены следующие задачи:
- Исследовано состояние работ по созданию паллетных систем хранения и выполнен их анализ. В результате установлено, что для модуля из
120 паллет, требуемый объем склада составляет:
- для фронтальных стеллажей – 1300 м3;
- для глубинных стеллажей – 1152 м3;
- для системы Pallet Shutlle – 302,4 м3.
- Разработаны математические модели, описывающие работу системы хранения. Определены области параметрических резонансов при поперечных колебаниях челночной тележки.
- Проведены исследования и установлено что мощность перемещения тележки – 0.31 кВт, а механизма подъема – 0.45 кВт.
- Разработана система хранения Pallet Shutlle, которая имеет следующие габаритные размеры каналов:
- ширина 1,35м;
- высота 1,8 м;
- длина 8 м.
- Даны рекомендации и определены требуемые затраты необходимые для хранения и обработки продукции на складе. По отношению к затратам определена рентабельность, которая составляет 23,6%. Установлена пропускная способность склада в размере 21663 м3/год. Определен коэффициент использования объема склада, который составляет 0,32.
Список источников
- Теоретические основы и расчеты транспорта энергоемких производств: учеб. пособие для вузов/ В.А. Будишевский [и др.]; под общ. ред. В.П. Кондрахина. 2–е изд., перераб. – Донецк: ГОУВПО
ДонНТУ
, 2017.– 216 с. - Расчеты и проектирование транспортных средств непрерывного действия : учеб. пособие для вузов./ А.И. Барышев [и др.]; под общ. ред. В.П. Кондрахина. 2–е изд., перераб. и доп.– Донецк: ГОУВПО
ДонНТУ
, 2017. – 689 с. - Транспортно–складська логістика гірничих підприємств : навч. посіб./ В.О. Будішевський [та ін.]; за ред. В.О. Будішевського, Л.Н. Ширіна. – Дніпропетровськ: Нац. гірничий ун–т, 2010. – 433 с.
- Петренко, О.С. Подвесные рельсовые дороги/ О.С. Петренко. – Москва : Машиностроение, 1981. – 272 с.
- Gutarevych, V. Service Areas of Transformation Centers/ V. Gutarevych, A. Ovcharenko, V. Zhuchenko // Transport Problems. – 2009. 53–57 с.
- Проектирование и конструирование транспортных, подъемных машин и комплексов/ В.А. Будишевский [и др.]; под общ. ред. В.А. Будишевського. – Донецк: Норд-Пресс, 2009. – 599 с.
- Гутаревич, В.О. Динамика шахтных подвесных монорельсовых дорог : монография/ В.О. Гутаревич. – Донецк : ЛАНДОН–ХХІ, 2014. – 205 с.
- Гутаревич, В.О. Динамическая нагруженность монорельсовых тележек и подвесного пути/ В.О. Гутаревич // Известия вузов. Северо–Кавказский регион. Технические науки. – 2015. – № 4. – 85-88 с.
- Gutarevych, V.O. Mathematical modeling of end carriage motion on the overhead monorail/ V.O. Gutarevych // Metallurgical and Mining Industry. – 2014. 52–56 с.