Библиотека| |Следующая статья
ВЫБОР
ПЕРВИЧНОГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ СИСТЕМЫ КОНТРОЛЯ СОСТОЯНИЯ ШАХТНОГО ПОДЪЕМНОГО
КАНАТА
Авраменко В.В.,
магистр; Косарев Н.П., к.т.н.,доц.
(ГОУ
ВПО «Донецкий национальный технический университет», г. Донецк, ДНР)
Проводя контроль в нужный момент, можно
избежать критического состояния каната, что в свою очередь позволит избежать
тяжёлые последствия, которые могут возникнуть в следствии аварии. Неразрушающий
метод более выгоден чем взятие образца каната. Он позволяет сэкономить как
финансы, так и время контроля, что в свою очередь может стать ключевым фактором
в условиях тяжёлых условий работы.
Первичный преобразователь имеет ключевую
роль практически в любой измерительной системе. Именно по этому его выбору
уделяется особое внимание.
Магнитный вид контроля относится одному из первых видов неразрушающего
контроля, который стал использоваться для диагностики продукции и промышленных объектов. Его
используют для дефектоскопии (с помощью магнитных методов могут быть
выявлены закалочные, шлифовочные трещины, закаты,
усталостные трещины и другие поверхностные дефекты
с раскрытием несколько
микрометров), определения твердости,
структуроскопии, определения
марок сталей, измерения физических
параметров материалов (например, магнитной проницаемости, магнитной
восприимчивости), для измерения
толщины покрытий, механических напряжений и даже химического анализа.
В основу магнитных методов дефектоскопии
положено изме‐ рение
параметров магнитных полей и магнитных характеристик ферромагнитных материалов,
способных существенно изменять
их под действием
внешнего (намагничивающего) магнитного
поля. При этом
измерения могут проводиться
как в приложенных,
так и оста‐ точных полях.
В зависимости от
объектов контроля применяют
раз‐ личные способы намагничивания контролируемых объектов . Намагничивают детали
постоянным, импульсным, переменным
или комбинирован-ным магнитным полем в
продольном, поперечным или циркулярном
направлении. Выбор направления магнитного поля и способа намагничивания зависит от
ориентации дефектов. Магнитное поле
должно быть перпендикулярно направлению
дефекта. После контроля детали
размагничивают нагревом выше
точки Кюри или
переменным магнитным полем
с амплитудой, равномерно уменьшающейся от
некоторой максимальной величины
(рав-ной или несколько большей амплитуды
намагничивающего поля) до нуля.

Рис. 1 - Схема
образования магнитного поля в области дефекта
При индукционном
методе (метод магнитного
НК, основанный на регистрации магнитных полей объекта
контроля индукционными
преобразователями) для
регистрации магнитных полей рассеяния, образующихся около дефектов
в намагниченной детали,используют катушку, которую двигают
вдоль контролируемого объекта. Магнитным полем детали в катушке наводится
электродвижущая сила (ЭДС). В местах рассеяния поля ЭДС Изменяет
лектрический сигнал, по которому судят о дефекте.
Метод
отличается повышенной надежностью, может работать в сильных магнитных полях.
Для понимания процесса преобразования рассмотрим
поле намагниченного каната в отдельном случае. За начало координат примем
середину рассмотренного участок каната, направив ось Z вдоль проводника.
Поскольку магнитное поле поверхностных токов аксиально симметричное, будет
достаточно вычислить индукцию в точках плоскости ZY. Координаты в этой
плоскости будет характеризовать расстояние r от оси Z и координатой Z (см.Рис.2).

Рис. 2– Определение
индукции равномерно намагниченного каната.
Следует отметить, что отнимаемой от нуля
является только координата Аz, поскольку ток течет
направлении оси Z. Тогда формула векторного потенциала
примет вид:
<[if !msEquation]> (1)
(1)
Перепишем (1) в цилиндрических
координатах. Единственная отличающаяся от нуля проекция индукции является Bϕ где ϕ –
аксиальный угол цилиндрической системы координат. Получаем:
minor-fareast;mso-bidi-font-family:"Times New Roman"'>![]() (2)
(2)
Исходя из формулы (2) с учетом (1) найдем
индукцию магнитного поля намагниченного каната:
<[if !msEquation]><[if !vml]> (3)
(3)
Подставив в формулу числовые значения
можно увидеть зависимость магнитной индукции от воздушного зазора между преобразователем
и исследуемым объектом.
<[if !vml]>
Рис. 3 –
Зависимость индукции от зазора
Величина индукции на велика и составляет
единицы мТл. При использовании преобразующего
элемента его выходное напряжение необходимо усилить. Самое простое выполнение
этой задачи, создание усилителя на том самом кристалле, например, элемента
Холла. По этой причине, лучшим вариантом будет использование магниточувствительной микросхемы (МЧМС). Благодаря
микросхеме можно также обеспечить большую чувствительность и точность. Магниточувствительные микросхемы содержат в одном
полупроводниковом кристалле интегральный преобразователь магнитного поля (магниторезистор, магнитотранзистор
или элемент Холла) и электронную схему усиления и обработки сигнала.
На рисунке 4 изображена функциональная
схема простейшей МЧМС, которая состоит из интегрального элемента Холла,
стабилизатора напряжения, дифференциального усилителя и эмиттерного повторителя
на транзисторе VT1.
<[if !vml]>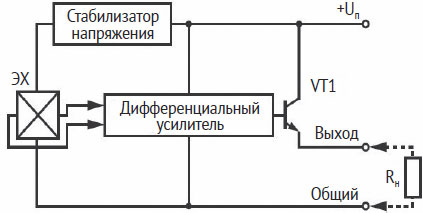
Рис. 4–
функциональная схема МЧМС
Как свидетельствует рисунок 4. магниточувствительная микросхема не только выполняет
преобразование значения индукции в значение напряжения, но также усиливает
сигнал, что влияется плюсом при работе с
незначительными значениями сигнала.
Рассмотрим принцип работы магниточувствительной микросхемы по принципиальной схеме
(Рис. 5).

Рис. 5 –
Принципиальная схема простейшей МЧМС
При отсутствии внешнего магнитного поля
напряжение на выходе микросхемы Uвых должно быть равно
нулю, но относительно земли оно не будет равно нулю, так как МЧМС работает от
однополярного питания.
Если внешнее магнитное поле В=0, то
дифференциальное напряжение на выходе ДУ равно нулю, однако выходное синфазное
напряжение будет равняться Uвых= Uп/2, то есть составлять половину от
напряжения питания.
Напряжение на выходе элемента Холла
является функцией управления Iуп элемента Холла
(ЭХ). Так как стабилизатор обеспечивает постоянный ток управления, то при
воздействии внешнего магнитного поля, выходное напряжение будет пропорционально
только индукции В.
Диоды VD1-VD4 выполняют роль стабилизатора напряжения.
Основными параметрами МЧМС является
чувствительность (S), обусловлена как
отношение изменения выходного напряжения к изменению индукции магнитного поля:
<[if !msEquation]>![]()
ΔUвых – изменение
выходного напряжения, В – магнитная индукция.
Чувствительность МЧМС зависит от
напряжения питания и температуры. На рисунке 6 приведены выходные
характеристики типичной микросхемы при разных напряжениях питания, а на рисунке
7 – при разной температуре/

Рис. 6 – Выходные
характеристики типичной МЧМС при разном напряжении питания

Рис. 7 – Выходные
характеристики типичной МЧМС при разных значениях температур
Перечень ссылок
1.
Каневский И.Н. Неразрушаемые методы контроля. Учебное пособие –
Владивосток: изд-во ДВВГТУ, 2007. – 243 с.
2.
Яковлев
С.Г. Методы и аппаратура магнитного и вихретокового
контроля Учебное пособие. – СПБ: изд-во СПБГЭТУ «ЛЭТИ», 2003 -88 с.
3.
Матвеев А.Н.
электричество и магнетизм. Учебное пособие – М.: высшая школа, 1983 – 463 с.
4.
Курбатов
П.А. Аринчин С.А. Численный расчет электромагнитных
полей. – М.: Энергоатомиздат, 1984 – 168 с.