Рисунок 1 — Формализация материальных потоков ОУ — водопроводный узел
УДК 628.17
Авторы: Горбунов Р.И., Чернышев Н.Н.
Источник: Материалы XIX Международной молодежной научной конференции СЕВЕРГЕОЭКОТЕХ–2018 — Ухта: УГТУ, 2018г.
Жилищно–коммунальное хозяйство — один из важных комплексов отраслей экономики, обеспечивающий функционирование жилых зданий, создающих безопасное, удобное и комфортабельное проживание и нахождение в них людей. Автоматизация технологических процессов жилищно–коммунального хозяйства играет важную роль в снижении экономических расходов, а также в повышении надежности и бесперебойной работы всех систем снабжения потребителей.
Автоматизация водопроводного узла может позволить добиться таких результатов:
Водопроводная сеть — это сложный многоуровневый объект жилищно–коммунального хозяйства города, предназначенный для транспортировки воды для питья и технических целей из одного места (обыкновенно водозаборных сооружений) в другое — к водопользователю (городские и заводские помещения). Он является одним из основных элементов системы водоснабжения.
Главное назначение системы водоснабжения — обеспечить водой каждую конечную точку потребления охватываемой территории, причем с таким минимально необходимым уровнем давления воды, достаточным для бесперебойной работы каждого критического узла и наносящим минимальный ущерб транспортной сети.
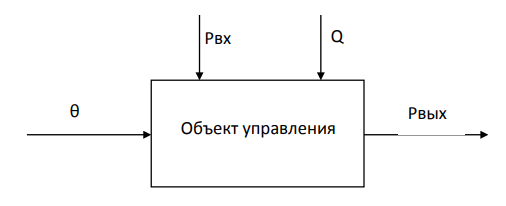
Водопроводную сеть можно условно разбить на контрольные точки (КТ), в которых необходимо изменять уровень выходного давления согласно заданию. Объектом управления в каждой такой контрольной точке снижения давления воды выступает управляемая задвижка (рис. 1).
Рисунок 1 — Формализация материальных потоков ОУ — водопроводный узел
Входная переменная: Θ — угол поворота задвижки. Выходная переменная: Pвых — давление воды на выходе. Возмущающие воздействия: Q — расход воды, Pвх — давление воды на входе. На объект действует два нелинейно изменяющихся возмущающих воздействия, такие как входное давление Pвх и расход воды потребителями Q. Управление выходным давлением осуществляется с помощью задвижки типа баттерфляй, главным параметром которой служит угол её открытия и может изменяться в пределах от 0 до 90 градусов.
Выходной переменной контрольного пункта является давление воды на выходе Pвых.
Входная переменная — Θ — угол поворота задвижки.
Возмущающие воздействия:
— Q — расход воды;
— Pвх — давление воды на входе.
На объект действует два нелинейно изменяющихся возмущающих воздействия, такие как входное давление Pвх и расход воды потребителями Q. Управление выходным давлением осуществляется с помощью задвижки типа баттерфляй, главным параметром которой служит угол её открытия и может изменяться в пределах от 0 до 90 градусов.
Цель создаваемой системы — уменьшение избыточного давления в сети водоснабжения за счет разработки системы автоматического управления давлением воды на заранее оборудованных узлах водопроводной сети.
Система автоматического управления давлением воды на узле водопроводной сети позволит постоянно сравнивать давление воды на выходе с заданием и в случае их рассогласования формировать такой управляющий сигнал, который позволит повернуть задвижку на угол, обеспечивающий за установленное время требуемое выходное давление воды. Также при изменении уровня одного из возмущающих воздействий система должна производить пересчет, чтобы сформировать управляющий сигнал, который будет компенсировать эти изменения.
Для реализации заданных целей необходимо решить ряд задач:
Согласно теории автоматического управления, существует три основных варианта построения системы управления давлением воды: принцип управления по возмущению (компенсации), принцип управления с обратной связью и комбинированный. Принцип комбинированного управления включает в себя и наличие обратной связи, и компенсацию возмущающих воздействий.
Этот принцип сочетает в себе преимущества этих двух способов управления, а именно:
Функции управления давлением воды находятся в непрерывной зависимости от процессов, происходящих на водопроводном узле и после него. Анализ водопроводного узла показал, что на формирование уровня выходного давления воды непосредственно влияют три параметра: входное давление воды Pх, расход воды после узла Q и угол поворота регулирующей задвижки. На основании полученных теоретических знаний из теории автоматического управления, выбранной концепции управления и проведенного анализа системы разработана структурная схема системы (рис. 2).
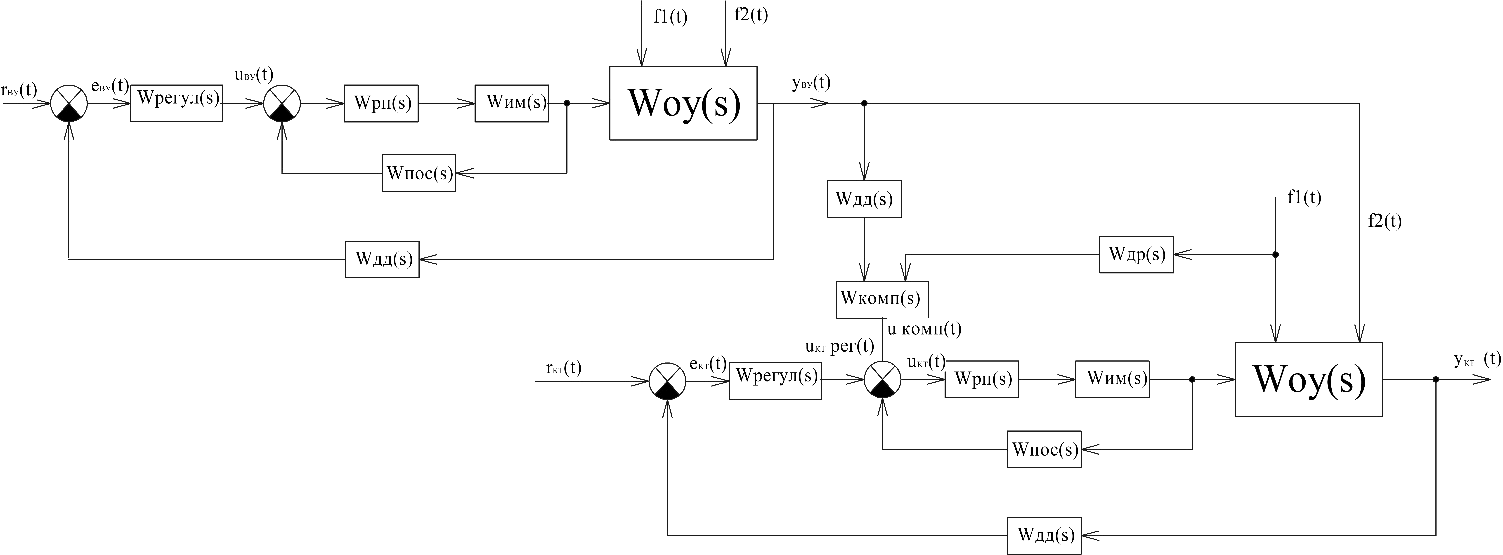
Рисунок 2 — Структурная схема системы управления
Система управления является двухконтурной, построенной таким образом, что выходная переменная первого контура является возмущением для объекта второго контура. Возмущающее воздействие расход воды f1(t) оказывает влияние на каждый из объектов управления. Для реализации системы управления выходным контуром решено использовать комбинированный принцип управления, так как технологически он является входом в пользовательскую зону. Согласно заданию на управление, именно в этой точке необходимо добиться наилучших показателей качества. На всех предшествующих контрольных точках достаточно реализовать управление с помощью обратной связи (ОС), чтобы добиться стабилизации давления воды на выходе.
В качестве объекта управления на схеме представлена регулируемая задвижка, управляет которой исполнительный механизм (ИМ). На ИМ поступает сигнал с регулятора положения (РП). Информация о текущем положении ИМ поступает на регулятор через потенциометр обратной связи (ПОС). Для компенсации изменений возмущающих воздействий, не дожидаясь изменения выходного давления, применен компенсатор. С помощью датчика давления (ДД) и датчика расхода (ДР) на вход компенсатора поступает информация о текущем давлении воды на входе и расходе воды после узла. Для формирования правильного компенсирующего сигнала на вход компенсатора также подается сигнал с заданным давлением Pзад, которое САУ должна обеспечить на выходе объекта. Обратная связь реализована с помощью датчика выходного давления. Сигнал с датчика поступает на блок сравнения вместе с сигналом задания. На выходе блока сравнения формируется ошибка рассогласования, которая подается на вход регулятора. Построенный на основании принципов и законов теории автоматического управления регулятор устанавливает регулирующий сигнал.
Непосредственно управляющий сигнал формируется одновременно двумя элементами: компенсатором и регулятором, и с помощью математических преобразований поступает на вход регулятора положения. Таким образом реализован комбинированный принцип управления. Управляющий сигнал на входе в РП соответствует физическому параметру — углу поворота регулируемой задвижки, в связи с чем имеет жёсткие ограничения и может изменяться в пределах от 0 до 90 градусов.
Отклонение регулируемой величины e(t) представляет собой разность между измеряемым значением давления и заданным и подается на вход управляющего устройства. Управляющее устройство — это техническое устройство, с помощью которого осуществляется автоматическое управление объектом управления. Управляющее устройство, в зависимости от величины и знака ошибки рассогласования e(t), формирует регулирующее воздействие uрег(t). В свою очередь компенсирующее устройство, на основании получаемой с датчиков давления и расхода информации, формирует компенсирующее воздействие u комп(t). Сформированные компенсирующее uкомп(t) и регулирующее uрег(t) воздействия поступают на блок управления, который формирует окончательное управляющее воздействие u(t). Управляющее воздействие u(t) поступает на регулятор положения исполнительным механизмом, с помощью которого воздействует на объект управления.
Математическая модель исполнительного механизма. В качестве исполнительного механизма в системе выступает электропривод. Согласно теории автоматического управления, математическую модель электропривода можно упрощенно представить в виде интегрирующего звена:
В технической документации к электроприводу указано, что он управляется сигналом напряжения 0..10 В, который приводит в действие поворотный механизм, перемещая его на угол от 0 до 90 градусов соответственно. Время полного поворота электропривода 150 секунд, отсюда скорость поворота электропривода:
где
α — полный угол поворота электропривода,
t — время полного поворота.
В связи с данным ограничением в математическую модель электропривода последовательно с интегратором следует добавить блок ограничения скорости изменения сигнала «RateLimiter». Скорость изменения сигнала является производной сигнала, вычисление производной сигнала выполняется по выражению:
Вычисленное значение производной сравнивается со значениями уровней ограничения скорости Risingslewrate и Fallingslewrate. Если значение производной больше, чем значение параметра Risingslewrate или меньше, чем значение параметра Fallingslewrate, то выходной сигнал блока вычисляется по выражению:
где R — уровень ограничения скорости при увеличении (уменьшении) сигнала.
Математические модели датчиков. В САУ давлением воды на узле водопроводной сети используется три датчика: датчик давления и датчик расхода воды, а также потенциометр обратной связи. Математические модели этих датчиков можно описать передаточной функцией апериодического звена 1–го порядка:
Так как, согласно структурной схемы САУ, датчик не осуществляет никаких преобразований измеряемых величин, примем коэффициент передачи датчиков равным единице. Согласно технической документации время обработки сигнала датчиком и его передачи составляет доли микросекунд. Учитывая информацию о длительности переходных процессов перепада давления на задвижке и поворота электропривода:
допустимо принять в качестве математической модели датчиков передаточную функцию пропорционального звена с единичным коэффициентом передачи.
Математическая модель компенсатора. Компенсатор имеет статические
характеристики и является функцией двух переменных: перепада давления &DeltaP и скорости
потока воды F: α=f(&DeltaP,F). В свою очередь скорость потока воды F, согласно технической
документации, имеет статическую зависимость от расхода воды Qдля всех стандартных
диаметров трубопровода. Математическую модель компенсатора опишем с помощью блока
N–DLookupTable
пакета Matlab&Simulink и математических преобразований, на основании
диаграммы перепада давления веществ через задвижку Баттерфляй ДУ
.
Необходимым условием надежной устойчивой работы САУ давлением воды на водопроводном узле является правильный выбор типа регулятора и настройка его параметров, гарантирующих требуемые показатели качества регулирования. В разрабатываемой САУ применяется два регулятора: регулятор положения ИМ и управляющий регулятор.
В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов. Согласно теории автоматического управления и учитывая, что математическая модель исполнительного механизма представлена в виде интегрирующего звена с ограничением скорости изменения сигнала, в качестве регулятора положения ИМ выберем П–регулятор. Для реализации управляющего регулятора выберем пропорционально–интегральный (ПИ) закон управления:

Пропорционально–интегральный закон регулирования наиболее часто реализуется в промышленной автоматике. Благодаря наличию интегральной составляющей ПИ–регулятор обеспечивает высокую точность в статическом режиме и хорошие показатели качества переходных процессов в динамическом режиме.
Для моделирования САУ давлением воды в водопроводной сети разработана математическая модель системы в пакете прикладных программ Matlab&Simulink. Исследуем динамику системы при конкретных заданных уставках. Стоит отметить, что запуск системы начинается с положения задвижки, которое соответствует полностью закрытому состоянию. Проведем моделирование САУ давлением воды в Matlab&Simulink и запустим программу построения графиков переходных процессов САУ. Получим график переходного процесса САУ давлением воды на водопроводном узле и график управляющего сигнала угла поворота ИМ (рис. 3).
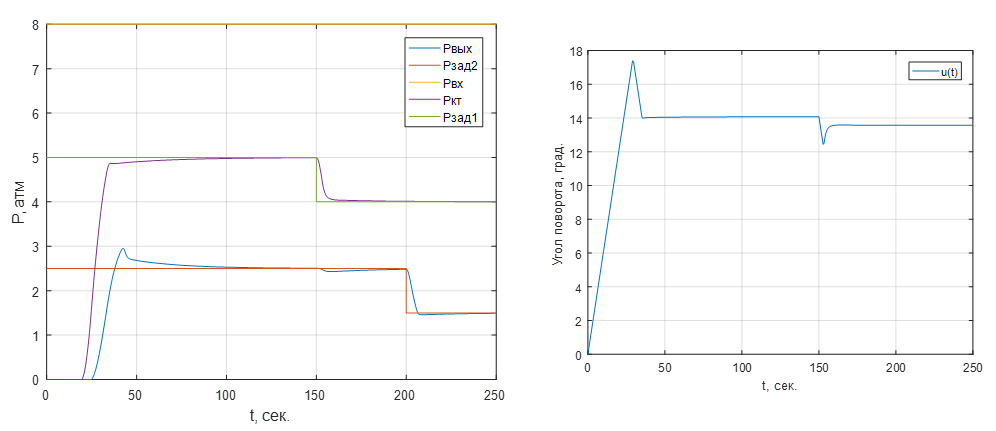
Рисунок 3 — Результаты моделирования
На основании полученных графиков переходного процесса разработанной САУ давлением воды на водопроводной сети получим такие показатели качества:
Таким образом, динамика синтезированной САУ удовлетворяет установленным требованиям и задачам. Управляющий сигнал является адекватным и не выходит из диапазона установленных ограничений.
1. Журба М.Г. Водоснабжение. Проектирование систем и сооружений / Журба М.Г., Соколов Л.И., Говорова Ж.М. — 2–е изд., перераб. и доп.— М.: Издательство АСВ, 2003. — 288с.
2. Олссон Г. Цифровые системы автоматизации и управления / Г. Олссон, Дж. Пиани. — 3–е изд., перераб. и доп. — Санкт–Петербург : Невский Диалект, 2001. — 557 с.
3. Бесекерский В.А. Теория автоматического регулирования и управления / Бесекерский В.А., Попов Е.П. — М.: Наука, 1972. — 768 с.