
Реферат по темі випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження, плановані результати
- 3. Вибір технології
- 4. Пристрої мережі
- 5. Загальний вигляд підключень в мережі
- 6. Завдання розробників подібних систем
- Висновок
- Список джерел
Вступ
Нині в промисловості дуже гостро стоїть проблема безпечного контролю виробництва. Контроль здійснюється певними датчиками, до яких стоїть деякий ряд вимог. Основні вимоги, це, в першу чергу, безпека і можливість підключення всіх датчиків в загальну мережу. Бездротові технології в повсякденному житті застосовуються дуже широко. Через Wi-Fi, 3G і 4G здійснюється доступ в Інтернет, передача мультимедіа, в корпоративних мережах для телефонного зв'язку користується DECT, для широких верств населення - GSM-телефонія. Відхід від проводів дає масу переваг: швидкість і легкість розгортання, реструктуризацію і масштабованість мереж, мобільність, зменшення витрат на прокладання кабелів зв'язку, загальну естетичність приміщень, в яких більше не лежать сплутані дроти.
Актуальність теми
В даний час область телекомунікацій змінюється з неймовірною швидкістю. З кожним днем з'являються нові стандарти, пристрої телекомунікацій та мереж зв'язку, нові підходи та вимоги якості обслуговування до надання телекомунікаційних послуг. Сьогодні концепція Інтернету Речей - «тренд» мереж зв'язку. Вектор досліджень бездротових сенсорних мереж (БСМ), що є основою даної концепції, змінюється з кожним днем. Декілька років тому основним напрямком досліджень БСМ було збільшення життєвого циклу мережі за рахунок протоколів маршрутизації, енергоефективності вузлів і балансування навантаження. На даний час гостро постають проблеми з забезпеченням вимог до якості обслуговування БСМ, розвитком топологій, технології зв'язку і принципи самоорганізації. На сьогоднішній день вузли БСМ забезпечують тривалий час функціонування – кілька років (до 10 років). Однак, плануючи мережу на тривалий період, неможливо бути абсолютно впевненим, що її структура не зміниться в майбутньому. Основною причиною втрати функціональності є втрата зв'язності мережі. Зв'язність мережі характеризує можливість доставки даних від вузла джерела до одержувача. Тому необхідно розробити моделі БСМ, що дозволяють оцінити зв'язність мережі (або потенційні можливості її забезпечення).
Мета і завдання дослідження, плановані результати
Метою дослідження є аналіз можливостей бездротової мережі датчиків, знаходження і, по можливості, усунення проблем, пов'язаних з монтажем або експлуатацією мережі.
Основні завдання дослідження:
- Пошук і виявлення основних проблем на всіх етапах розгортання та експлуатації мережі.
- Аналіз виявлених проблем.
- Пропозиції щодо усунення або згладжування проблем.
- Оцінка запропонованих рішень.
Об'єкт дослідження: бездротова сенсона мережа в умовах промислових Інфокомунікацій
Вибір технології
Більшість вимог, що висунені до бездротових промисловим мереж, досягаються завдяки використанню технології Zig-Bee, яка маючи невисоку швидкість передачі даних і відстань між вузлами, володіє важливими, з погляду застосування в промисловості, перевагами.
Малюнок 1 – Логотип ZigBee Alliance
Технології ZigBee спочатку розроблялися для створення надійних розподілених мереж датчиків і керуючих пристроїв з невисокими швидкостями передачі даних. В цих технологіях реалізована підтримка мережевої топології mesh (комірчастої топології), сплячих і мобільних вузлів, а також вузлів, які забезпечують роботу алгоритмів ретрансляції та самовідновлення. В таблиці вказана швидкість 250 кбіт/с — це максимальна пропускна здатність мережі. Корисна швидкість буде близько 30-40 кбіт/с в межах сусідніх вузлів і 5-25 кбит/с при використанні ретрансляції. Для нескладних датчиків цієї пропускної здатності цілком вистачить для задоволення наших потреб.
У мережах ZigBee надійність зв'язку підвищується за рахунок наявності надлишкових зв'язків між пристроями. Всі пристрої, які не йдуть в сплячий режим, виконують роль роутерів, які відповідальні за маршрутизацію мережевого трафіку, вибору оптимального маршруту слідування та ретрансляції пакетів. Навіть якщо з ладу вийде пристрій, який виступав в якості організатора мережі, ZigBee-мережа продовжить функціонувати далі. Виникнення перепони або перешкоди, а також вихід будь-якого з роутерів з ладу не є критичним за рахунок наявності надлишкових зв'язків. Тому з введенням додаткових вузлів, які мають стаціонарне живлення і можуть виконувати завдання роутера, мережа стає надійніше.
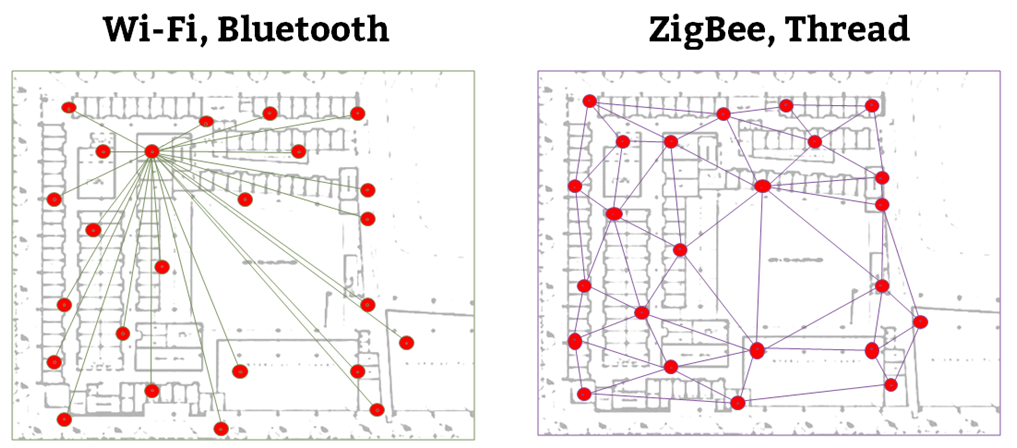
Малюнок 2 – Порівняння топологій
У мережах Bluetooth і Wi-Fi мережева взаємодія йде через центральний шлюз. І якщо він вийде з ладу, то обмін даними стане неможливим.
Крім цього окремі вузли можуть залишитися без зв'язку, якщо несподівано виникла перешкода на шляху проходження сигналу.
Іншою відмінною рисою стандарту є можливість самовідновлення дієздатності мережі в разі виходу з ладу окремих її вузлів. Ця властивість грунтується на тому, що кожен вузол стежить за своїми сусідами, постійно оновлюючи маршрутні таблиці на основі оцінки потужності прийнятих від них сигналів. В результаті, при зміні просторового розташування сусідів або виході з мережі одного з пристроїв, обчислюється новий маршрут прямування повідомлення. Ця перевага є винятково важливою у мережах, що функціонують на промислових об'єктах в жорстких умовах експлуатації при наявності промислових перешкод, а також у тих випадках, коли частина вузлів знаходиться на рухомих пристроях, наприклад рухомих елементах верстата.
Основні переваги технології Zig-Bee:
- Завдяки комірчастій (mesh) топології мережі ZigBee забезпечує самовідновлення і гарантовану доставку пакетів у випадках обриву.
- Специфікація ZigBee передбачає криптографічний захист даних.
- Пристрої ZigBee відрізняються низьким електроспоживанням.
- Мережа ZigBee-самоорганізована.
- Пристрої ZigBee компактні і мають відносно невисоку вартість.
- Необмежене покриття.
Модель OSI мережі ZigBee включає в себе фізичний рівень, канальний рівень складається з підрівня доступу до середовища передачі MAC і LLC, а також мережевий рівень NWK (NetWorK) і рівень додатків APL, що складається з підрівня підтримки додатків (APplication Support sub-layer - APS), підрівня об'єктів пристроїв ZigBee (ZigBee Device Object - ZDO) та об'єктів Application Objects, визначаються виробником ZigBee-пристроїв.
Мережа ZigBee-самоорганізована, і її робота починається з формування. Пристрій, призначений при проектуванні координатором персональної мережі (PAN координатор), визначає канал, вільний від перешкод, і очікує запитів на підключення. Пристрої, які намагаються приєднатися до мережі, розсилають широкомовний запит. Поки Pan координатор-єдиний пристрій в мережі, відповідає на запит і надає приєднання до мережі тільки він. Надалі приєднання до мережі можуть надавати також маршрутизатори, що приєдналися до мережі. Пристрій, що отримав відповідь на широкомовний запит, обмінюється з приєднуючим пристроєм повідомленнями, щоб визначити можливість приєднання. Можливість визначається здатністю приєднуючого маршрутизатора обслужити нові пристрої на додаток до раніше підключеним.
Пристрої мережі
Мережа на базі технології Zig-Bee включає 3 типи пристроїв:
Координатор (COO) – пристрій, який організовує мережу. Бере участь у процесі моніторингу та маршрутизації трафіку, а також є одночасно довірчим центром (trust-центром). Довірчий центр встановлює політику безпеки і задає параметри під час підключення пристрою до мережі. Завжди знаходиться в активному режимі, через що пристрій повинен бути підключений до стаціонарного джерела живлення.
Роутер (FFD) – це вузол, який має стаціонарне живлення і отже може постійно брати участь в роботі мережі. Координатор також є роутером. На вузлах цього типу лежить відповідальність за маршрутизації мережевого трафіку. Роутери постійно підтримують спеціальні таблиці маршрутизації, які використовуються для прокладання оптимального маршруту і пошуку нового, якщо раптом який-небудь пристрій вийшов з ладу. Наприклад, роутерами в мережі ZigBee можуть бути розумні розетки, блоки керування освітлювальними приладами, датчики вологості або температури, або будь-який інший пристрій, що має підключення до мережі електроживлення.
Перераховані пристрої виступають в якості батьківських вузлів для кінцевих пристроїв. Максимальне число дочірніх вузлів у роутера або координатора може досягати 32. Батьківські пристрої відповідають за прийом і збереження повідомлень для кінцевих пристроїв, які підключені до них. Кінцеві пристрої, в свою чергу, спілкуються з мережею через батьків. Кожен раз, коли новий кінцевий пристрій підключається до мережі, або ж коли старий перепідключається, для нього визначається батько, який робить запис у спеціальній таблиці дочірніх пристроїв. У цій таблиці зберігається коротка і довга адреси дочірнього вузла і його тип.
Сплячий кінцевий пристрій (SED) - це пристрій, який підключається до мережі через батьківський вузол-роутер або координатор - і не бере участі в маршрутизації трафіку. Все спілкування з мережею для них обмежується передачею пакетів на "батьківський" вузол або зчитуванням даних, надійшли з нього ж. "Батьком" для таких пристроїв може бути будь-який роутер або координатор. Кінцеві пристрої більшу частину часу знаходяться в сплячому режимі і відправляють керуючий або інформаційне повідомлення зазвичай тільки за певної події, наприклад натискання кнопки запуск верстата, просте відкриття двері, або просто з певною частотою у часі. Це дозволяє їм довго зберігати енергію вбудованого джерела живлення. Прикладом кінцевих пристроїв в мережах ZigBee можуть бути бездротові вимикачі, керуючі роботою світильників і працюючі від батарейок датчики протікання води, датчики тиску, запиленості.
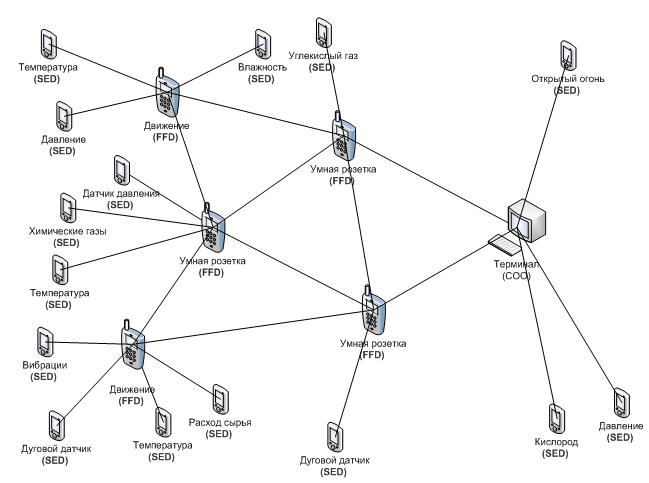
Малюнок 3 – Схематичне розташування пристроїв
Загальний вигляд підключень в мережі
Керуючі модулі встановлюються на корпусі механізмів або в безпосередній близькості від них. Зв'язок з центральним контролером здійснюється по радіоканалу, що автоматично забезпечує гальванічну ізоляцію між модулями. Застосування ж радіоканалу для зв'язку з пультом оператора дозволяє зробити його мобільним з автономним живленням. При цьому довжина кабельних ліній мінімальна. Іншою важливою перевагою розподіленої системи є висока живучість, так як при виході з ладу одного з керуючих модулів непрацездатною виявляється лише невелика частина системи. При подібній організації системи центральний процесор може володіти меншими обчислювальними потужностями, а отже, бути доступнішим, дешевшим і мати менші масогабаритні розміри.
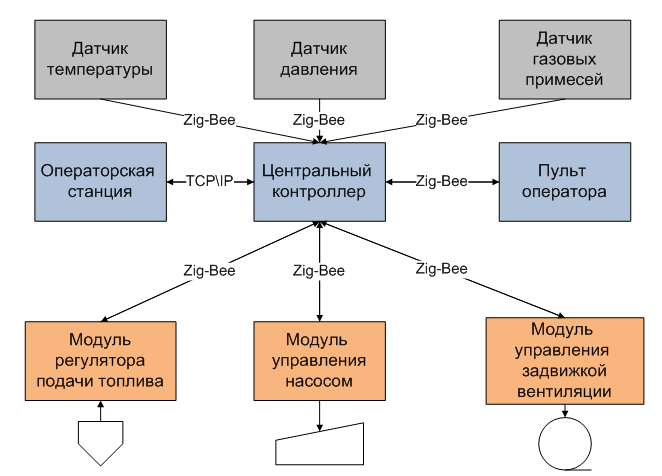
Малюнок 4 – Приклад розподіленої бездротової системи управління
Моти
Бездротові сенсорні мережі (wireless sensor networks) складаються з мініатюрних обчислювально-комунікаційних пристроїв — мота (від англ. motes — порошинки), або сенсорів. МОП являє собою плату розміром зазвичай не більше одного кубічного дюйма. На платі розміщуються процесор, пам'ять-флеш і оперативна, цифроаналогові і аналого-цифрові перетворювачі, радіочастотний приймач, джерело живлення і датчики. Датчики можуть бути найрізноманітнішими. Набір застосовуваних датчиків залежить від функцій, виконуваних бездротовими сенсорними мережами. Живлення мота здійснюється від невеликої батареї. Моти використовуються тільки для збору, первинної обробки і передачі сенсорних даних.

Малюнок 5 – Мот
Комунікаційні функції моти здійснюють за принципами Ad-hoc мереж децентралізованих бездротових мереж, що не мають постійної структури. Клієнтські пристрої з'єднуються «на льоту», утворюючи собою мережу. Кожен вузол мережі намагається переслати дані, призначені іншим вузлам. При цьому визначення того, якому вузлу пересилати дані, проводиться динамічно, на підставі зв'язності мережі.

Малюнок 6 – TinyOS
Для виконання функцій на кожен моп встановлюється спеціалізована операційна система. На даний час в більшості бездротових сенсорних мереж використовується TinyOS. TinyOS відноситься до програмного забезпечення з відкритим кодом. TinyOS — це керована подіями операційна система реального часу, розрахована на роботу в умовах обмежених обчислювальних ресурсів. Ця ОС дозволяє мотам автоматично встановлювати зв'язки з сусідами і формувати сенсорну мережу заданої топології.
Очевидно, что разработать схемы обмена данными между сотнями мотов не так-то просто. Наряду с прочим необходимо учесть тот факт, что сенсорные сети работают в нелицензированных частотных диапазонах, поэтому в ряде случаев могут возникать помехи, создаваемые посторонними источниками радиосигналов. Необходимо учитывать, что из-за недостаточной энергоемкости и внешних воздействий моты будут выходить из строя навсегда или на какое-то время. Во всех таких случаях схемы обмена данными должны модифицироваться. Поскольку одной из важнейших функций TinyOS является автоматический выбор схемы организации сети и маршрутов передачи данных, беспроводные сенсорные сети по существу являются самонастраиваемыми.
Завдання розробників подібних систем:
- При використанні в системах розподіленого мікропроцесорного керування зі збором інформації з інтелектуальних датчиків підбір конфігурації окремих вузлів мережі має здійснюватися з урахуванням мінімізації їх енергоспоживання і процесорних ресурсів.
- Можливість організації самоконфігурованих мереж зі складною топологією, в яких маршрут повідомлення автоматично визначається не тільки кількістю справних або включених/вимкнених на поточний момент пристроїв (вузлів), але і якістю зв'язку між ними, яка повинна автоматично визначатися на апаратному рівні.
- Забезпечення масштабованості – повино бути передбачене автоматичне введення в роботу вузла або групи вузлів відразу після подачі живлення на вузол.
- Повинна бути передбачена можливість вибору альтернативного маршруту передачі повідомлень при відключенні/збої в окремих вузлах з метою гарантування високої надійності мережі.
Висновки
Таким чином, задача проектування бездротової мережі для умов промислового підприємства є складною багатокритеріальною задачею, оптимальне рішення якої вимагає застосування методів оптимізації, в тому числі, заснованих на інтелектуальних інформаційних технологіях.
Список джерел
- Дианов И., Яманов А. Комплексные решения по GPRS-связи в системах промышленной автоматизации и диспетчеризации // «Беспроводные технологии». 2010 324 c.
- Радке, Хорст-Дитер Все о беспроводных сетях / Хорст-Дитер Радке , Йеремиас Радке. - М.: НТ Пресс, 2011. - 320 c.
- Соколов, А.В. Защита информации в распределенных корпоративных сетях и системах / А.В. Соколов, В.Ф. Шаньгин. - М.: ДМК Пресс, 2011. - 656 c.
- Хабрейкен, Джо Домашние беспроводные сети / Джо Хабрейкен. - М.: НТ Пресс, 2014. - 400 c.
- Расстригин, Л.А. Вычислительные машины, системы, сети… / Л.А. Расстригин. - М.: Наука, 2015. - 224 c.
- Трусов, Александр Беспроводные сети в Windows / Александр Трусов. - М.: Питер, 2013. - 128 c.
- Свами, М. Графы, сети и алгоритмы / М. Свами, К. Тхуласираман. 2013. - 409 c.
- Беспроводные сети Wi-Fi. - М.: Интернет-университет информационных технологий, Бином. Лаборатория знаний, 2013. - 216 c.
- Росс, Д. Беспроводная компьютерная сеть Wi-Fi своими руками (+ CD-ROM) / Д. Росс. - М.: Наука и техника, 2015. - 384 c.
- Ватаманюк, А. И. Беспроводная сеть своими руками / А.И. Ватаманюк. - М.: Книга по Требованию, 2011. - 194 c.
- Колисниченко, Д. Беспроводная сеть дома и в офисе / Д. Колисниченко. - М.: БХВ-Петербург, 2015. - 997 c.
- Брэгг, Р. Безопасность сетей: полное руководство / Р. Брэгг, М. Родс-Оусли, К. Страссберг. - М.: Эком, 2015. - 912 c.
- Кюнель Samba: интеграция Linux/Unix-компьютеров в сети Windows / Кюнель, Йенц. - М.: Мн: Новое знание, 2012. - 399 c.
- Рассел, Джесси Безопасность в беспроводных самоорганизующихся сетях / Джесси Рассел. - М.: VSD, 2012. - 274 c.
- Новиков, Ю.В. Аппаратура локальных сетей: функции, выбор, разработка / Ю.В. Новиков, Д.Г. Карпенко. - М.: Эком, 2011. - 288 c.
- Шубин, В. И. Беспроводные сети передачи данных / В.И. Шубин, О.С. Красильникова. - М.: Вузовская книга, 2013. - 104 c.
- Майника, Э. Алгоритмы оптимизации на сетях и графах / Э. Майника. - М.: [не указано], 2012. - 334 c
- Сергеев, Александр Беспроводная сеть в офисе и дома / Александр Сергеев. - М.: Питер, 2014. - 208 c.
- Мерритт, М. Безопасность беспроводных сетей / М. Мерритт. - М.: Книга по Требованию, 2015. - 282 c.
- Гайер, Дж. Беспроводные сети. Установка и устранение неполадок за 5 минут / Дж. Гайер, Э. Гайер, Дж.Р. Кинг. - М.: НТ Пресс, 2015. - 176 c.
- Гайер, Дж. Беспроводная сеть за 5 минут. От выбора оборудования до устранения любых неполадок / Дж. Гайер, Э. Гайер, Дж.Р. Кинг. - М.: НТ Пресс, 2012. - 176 c.
- Яманов A. Технология развертывания локальных беспроводных радиосетей ZigBee в системах промышленной автоматизации и диспетчеризации / А.Д. Яманов, Д. А. Алевский, А. Е. Плеханов. «ИСУП». 2011. № 6 (36). 248 с.
- Баранов С.И. Синтез микропрограммных автоматов (граф-схемы и автоматы) / С.И. Баранов. – Л.: Энергия, 1979. – 232 с.
- Иваненко В. Информационные аспекты при разработке сенсорных сетей (Часть 1) / В.А. Иваненко, А.Н. Зеленин. Восточно-Европейский журнал передовых технологий. – 2011. – 381 с.
- Palnitkar S. Verilog HDL. A guide to digital design and synthesis / S. Palnitkar. – SunSoft Press, 1996. – 396 pp.
- Грушвицкий Р.И. Проектирование систем на микросхемах программируемой логики / Р.И. Грушвицкий, А.Х. Мурсаев, Е.П. Угрюмов. – СПб.: БХВ-Петербург, 2002. – 608 с.
- Максфилд К. Проектирование на ПЛИС. Курс молодого бойца / К. Максфилд. – М.: Издательский дом «Додэка-XXI», 2007. – 408 с.
- Grout I. Digital systems design with FPGAs / I. Grout. – Elsevier, 2008. – 724 pp.
- Zeidman B. Designing with FPGAs and CPLDs / B. Zeidman. – Elsevier, 2002. – 224 pp.