
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Технологічна схема системи ПНС
- 2. Склад і принцип роботи системи підкачувати станції
- 3. Огляд і аналіз відомих рішень з питання систем контролю і управління підвищення тиску води
- 4. Обгрунтування прийнятого напрямки вирішення завдання
- Висновки
- Перелік посилань
Вступ
Близько 60% витрат електроенергії в промисловості і комунальному господарстві (ЖКГ) припадає на частку електродвигунів. При цьому велика частина цього енергоспоживання припадає на приводні системи вентиляторів, компресорів, насосів та інших установок з циклічним режимом навантаження.
Електропривод є енергосилових основою сучасного виробництва і, в свою чергу, серед промислових електроприводів переважають електроприводи з асинхронними короткозамкненими двигунами, які споживають до 50% енергії, споживаної електроприводом. Ці електроприводи, завдяки своїй простоті і відносно невисокій вартості, знайшли широке застосування в різних механізмах. Загальновідомі і їх недоліки — важкий пуск при прямому підключенні до мережі, що супроводжується 6 – 7 – кратними струмами, і, як наслідок, невисока експлуатаційна надійність, складність регулювання швидкості.
Характерним прикладом використання асинхронних двигунів є насосні станції холодного і гарячого водопостачання, каналізаційні насосні станції та системи опалення. Цей тип механізмів споживає не менше 20 – 25% усієї вироблюваної електроенергії.
У переважній більшості випадків, електроприводи зазначених механізмів є нерегульованими, що не дозволяє забезпечити режим раціонального енергоспоживання і витрати при зміні технологічних потреб в широких межах. Обрані, виходячи з максимальної продуктивності, ці механізми значну частину часу працюють з меншою продуктивністю, оскільки він набуде потреби в різні періоди часу.
1. Технологічна схема системи ПНС
Підвищувальна насосна станція являє собою систему, яка підвищує рівень тиску при подачі води і складається з наступних компонентів: датчик тиску, що стоїть на виході системи; насоси; резервуар; засувка. (Рис. 1)
Вода надходить по трубопроводу в резервуар. Якщо резервуар заповнений, то вода перекривається засувкою. З резервуара вода надходить на насоси, які вмикаються і вимикаються, якщо тиск води на виході недостатнє або перевищує уставки. Зняття показань, вмикання/вимикання насосів, перекриття води здійснюють люди.
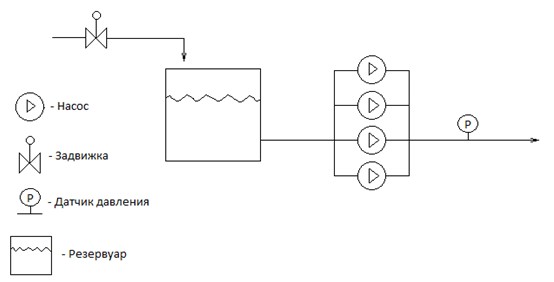
Малюнок 1 – Технологічна схема неавтоматизованої ПНС
2. Склад і принцип роботи системи підкачувати станції
Підвищувальна/підкачувальна насосна станція (ПНС) призначена для перекачування і підвищення тиску чистої води в системі водопостачання. Установка даного устаткування — ПНС — забезпечує вирішення завдань господарсько – побутовогоі протипожежного водопостачання не тільки одного або декількох будівель промислового, адміністративного або житлового призначення(В тому числі, підвищеної поверховості), але і цілих населених пунктів і підприємств.
Використання ПНС допустимо в системі водопостачання:
- багатоквартирних будинків;
- учбових закладів;
- промислових систем;
- медичних установ;
- готелів і т.д.
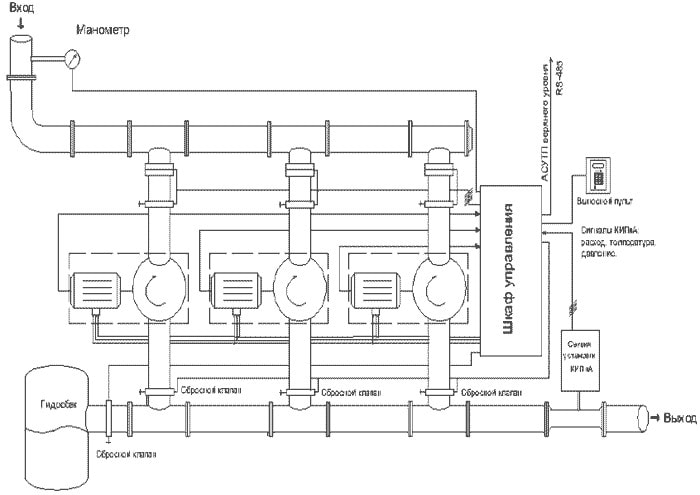
Насосні станції підкачки без резервуарів більш компактні (рис.2). Їх часто розміщують в заглиблених будівлях невеликого розміру. Режим роботи таких станцій жорстко пов'язаний з режимом водоспоживання. Такі станції мають у своєму розпорядженні в підземних камерах (колодязях). При достатній тиск в мережі міського водопроводу, що забезпечує споживання мікрорайонів або селищ, можливо обмежитися спорудою тільки відвідав і мережі.

Малюнок 2 – Загальний вигляд підкачувальної насосної станції без резервуара:
1) павільйон;
2) насосна установка;
3) трубопроводи з запірно–регулюючої арматурою;
4) шафа управління;
5) вантажопідйомне пристрій;
6) світильники;
7) прилади опалення;
8) вентиляційна система.
Ціна такої станції залежить від її комплектації:
- количества насосов и их мощностных характеристик;
- кількості насосів і їх потужних характеристик;
- опцій, пропонованих виробником.
Для того щоб станція могла нормально функціонувати, тиск в трубопроводі, що подає не повинно бути менше 10 м.вод.ст. В іншому випадку, у всмоктуючому трубопроводі утворюється вакуум, або може статися розгерметизація з'єднань, з подальшим підсмоктуванням забрудненого повітря.
Розрахунок напору і подачі насосних агрегатів визначається на стадії проектування системи водопостачання. Причому, кожній станції присвоюється своя категорія забезпечення подачі.
При необхідності транспортування води на довгі дистанції, тиск в напірному трубопроводі знижується прямо пропорційно його протяжності. Таким чином, щоб компенсувати втрату напору, виникає пряма необхідність установки на трасі магістралі підвищувальних станцій — і навіть не однієї, а кількох.
Більшість підприємств не має автономного водопроводу і користуються водою з міських водопроводів, на загальних підставах. Напору наявного трубопроводу для виробництва недостатньо і в години пік тиск води істотно знижується. Тому, підприємствам, яким необхідний стабільний напір води, потрібна наявність підвищувальні насосні станції. Розміщується вона безпосередньо на вводі трубопроводу в цех, якому не вистачає наявного тиску води. У системах виробничого водопостачання нерідко використовують схеми, що передбачають її охолодження і повторне використання.
Малюнок 3 – Схема підкачувальної насосної станції.
3. Огляд і аналіз відомих рішень з питання систем контролю і управління підвищення тиску води
Існує безліч рішень проблем автоматизації і багато з них використовують частотний перетворювач.
В одному з контурів на виході системи стоять вимірювачі тиску і витрати води. Показання з даних вимірників впливають на частоту обертання колеса насоса: при відхиленні тиску і витрати на виході системи від заданих, на ПЧ надсилається керуючий сигнал; частота змінюється, і тиск прагне до заданого.
У другому контурі, де здійснюється подача води в резервуар, на верхній частині резервуара встановлений вимірник рівня (рівнемір). При досягненні верхнього або нижнього меж рівня води, на регулятор витрати надсилається керуючий сигнал, який змушує виконавчий механізм перекривати або відновлювати надходження води в резервуар.
Також існує реалізація, в якій тиску отримують не на виході системи, а перед насосом, що підкачує. У такій системі отримане тиск порівнюють з уставками, і також подається регулює сигнал. Частотний перетворювач, як і в попередньому варіанті, змінює частоту обертання колеса насоса.
Однак, при попередньому вимірі тиску регулювання менш точна, ніж при використанні схеми регулювання по відхиленню.
У даній роботі буде використовуватися варіант реалізації схеми регулювання підкачувальної насосної станції по відхиленню і з попередніми вимірюванням тиску. Це дозволить проводити більш точне регулювання, а також на підставі сигналу датчика, встановленого перед насосами, що підкачують, швидше і легше визначити сухий хід.
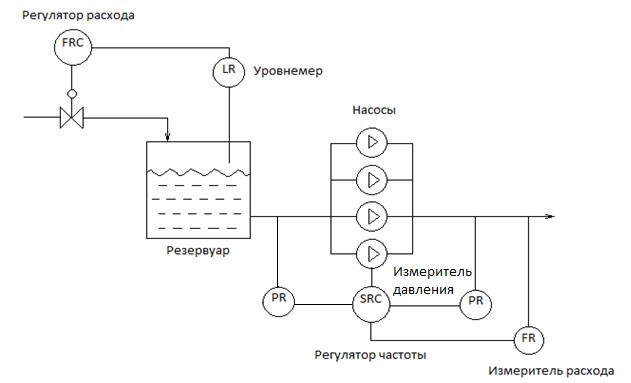
Малюнок 4 – Схема регулювання ПНС з частотним регулювання по відхиленню і з попередніми вимірюванням тиску.
4. Обгрунтування прийнятого напрямки вирішення завдання
Для меншого енергоспоживання використовується метод управління, орієнтований не тільки на підтримку заданого тиску, але і на контроль ефективності роботи насосної станції. Як критерій ефективності роботи насосної станції використовується її гідравлічний ККД, який визначається за формулою:
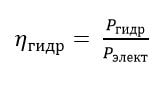
де Pгидр – гідравлічна потужність, що розвивається насосною станцією, тобто потужність, що передається рідини насосом;
Pэлект – сумарна електрична потужність, споживана приводами регульованих насосних агрегатів
і приводами насосів, що працюють від мережі.
Електрична потужність є вимірюваним параметром, гідравлічна (корисна потужність) визначається формулою:
де Q – подача насосної станції, м3/с;
ρ – щільність рідини кг/м3 ;
g – прискорення вільного падіння, м/с2 ;
H – повний напір насоса, м.
Повний напір насоса:
де Z – висота центру поперечного перерізу трубопроводу над еталонної площиною;
р – манометричний тиск, віднесене до центру поперечного перерізу;
u – середня осьова швидкість, що визначається відношенням об'ємної подачі до площі поперечного перерізу труби.
Зміна напору і потужності при регулюванні частоти обертання працюющего колеса для відцентрових насосних агрегатів описується рівняннями, наведеними нижче. Напорная характеристика насоса:
де A2, B2, C2 – коефіцієнти, які визначаються характеристиками насосного агрегату;
n – частота обертання робочого колеса;
Q – витрата, що розвивається насосним агрегатом.
Визначається корисна потужність насосного агрегату, підставивши (4) в (2):
При цьому на затрачену насосом механічну потужність при зміні швидкості обертання істотно впливають циркуляційні і механічні втрати в насосі. У загальному вигляді рівняння механічної потужності:
де A, B, D – коефіцієнти, які визначаються характеристиками насосного агрегату.
Для регульованого насоса споживана енергія буде визначатися формулою:
де ηдв, ηпч – ККД електродвигуна і перетворювача частоти.
Подставивши рівняння (5) – (7) в (1), отримуємо аналітичну залежність зміни ККД насоса від частоти обертання:
Вплив регульованих насосів, які перебувають в неефективному режимі, на вихідний тиск станції незначно. Для виключення неефективної роботи регульованих насосних агрегатів пропонується визначати миттєву ефективність кожного з них, а потім відключати насосний агрегат в разі зниження його ефективності нижче заданого порогу. Миттєва ефективність оцінюється, виходячи з потужності, споживаної кожним з насосів, а також з його розвиваючих напору і витрати. При цьому витрата оцінюється, виходячи з паспортної напірної характеристики насоса і поточної частоти обертання його робочого колеса.
Висновки
Як об'єкт управління була розглянута підкачувальна насосна станція. Було перераховано її особливості і деякі характеристики.
ПНС була розглянута, як об'єкт регулювання. Розглянуто використання частотного перетворювача з метою знизити витрати на електроенергію. Також були розглянуті різні схеми регулювання і визначені їх переваги та недоліки. За вищевказаної інформації були висунуті цілі і завдання автоматизації розробки, а також був визначено вимоги користувача до системи управління. Був пояснён вибір напрямку вирішення автоматизації.
Перелік посилань
- Повысительная насосная станция в системе водоснабжения и водоотведения [Электронный ресурс]. / – Режим доступа: http://moikolodets.ru/~povysitelnaya....
- Б.С. Лезнов, Частотно-регулируемый электропривод насосных установок. 2013. – 176с.
- Черных И.В. Simulink: Инструмент моделирования динамических систем [Электронный ресурс]. – Режим доступа: http://matlab.exponenta.ru/simulink....
- Коренькова Т.В., Михайличенко Д.А., и др. Исследование системы ПЧ–АД–Насос–Гидросеть. — Вісник Кременчуцького державного політехнічного університету. – Випуск 2/2003(19), с. 377.
- Попович М.Г., д.т.н., проф., Кіселичник О.І., и др. Адаптивні електромеханічні системи автоматичного керування насосними установками з векторно-керованими асинхронними двигунами. – Вісник Кременчуцького державного політехнічного університету. – Випуск 3(50)/2008 частина 1. – с.72.
- Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов.– Л.: Энергоиздат. Ленинградское отделение, 1982.– 392 с.
- Лукас В. А. Теория автоматического управления. / Лукас В. А. – М.: Недра, 1990. – 416 с.
- Зайцев Г.Ф. Теория автоматического управления и регулирования. / Зайцев Г.Ф. – Киев: Вища школа, 1988 – 431 с.