Аннотация
В.Ю. Островлянчик, В.А. Кубарев – Методика разработки программного обеспечения систем логического управления подъемными установками Представлена блок–схема типовой системы управления электроприводом шахтной подъемной установки, а также получен граф функционирования автомата
Требования к надежности и отказо-устойчивости систем управления шахтных подъёмных установок (ШПУ), связанные с интенсификацией производства и приведением их к современным требованиям правил безопасности увеличиваются с каждым годом. Поэтому, актуальны исследования направленные на, разработку методик проектирования и описания программируемых средств управления, обеспечивающих оптимальность процесса разработки программного обеспечения для системы управления и надежность работы ШПУ в целом.
Блок-схему типовой системы управления электроприводом (ЭП) ШПУ можно представить, как состоящую из следующих асинхронно взаимодействующих систем (рис. 1): 1) Система технологической автоматики (СА); 2) Система защит (СЗ); 3) Система сигнализации (СС); 4) Аппарат задания хода (АЗХ), включающий в себя: устройство контроля положения сосуда, ограничитель скорости, глубиномер; 5) Система управления загрузкой скипа (СУЗС); 6) Устройство управления скоростью (УУС), включающего систему автоматического регулирования скорости, которая поддерживает постоянство скорости подъёма сосуда (САРС) и систему формирования управляющего воздействия (СФУВ), для систем с ЭП постоянного тока или частотного ЭП — система импульсно-фазового управления, для систем с двигателями переменного тока с фазным ротором — система управления контакторами ускорения; 7) Система возбуждения (динамического торможения) подъемного двигателя (СУВПД); 8) На подъемных установках с приводом по системе Г–Д также присутствует система управления возбуждением синхронного двигателя (СУВСД). При этом СА, СЗ, СС, АЗХ и СУЗС можно объединить в систему логического управления (СЛУ) ШПУ, так принцип действия этих систем заключается в выдаче дискретных, имеющих два состояния «0» и «1» управляющих сигналов, служащих для формирования алгоритма работы ЭП ШПУ.
В общем виде, модель системы логического управления можно представить совокупностью булевых формул:
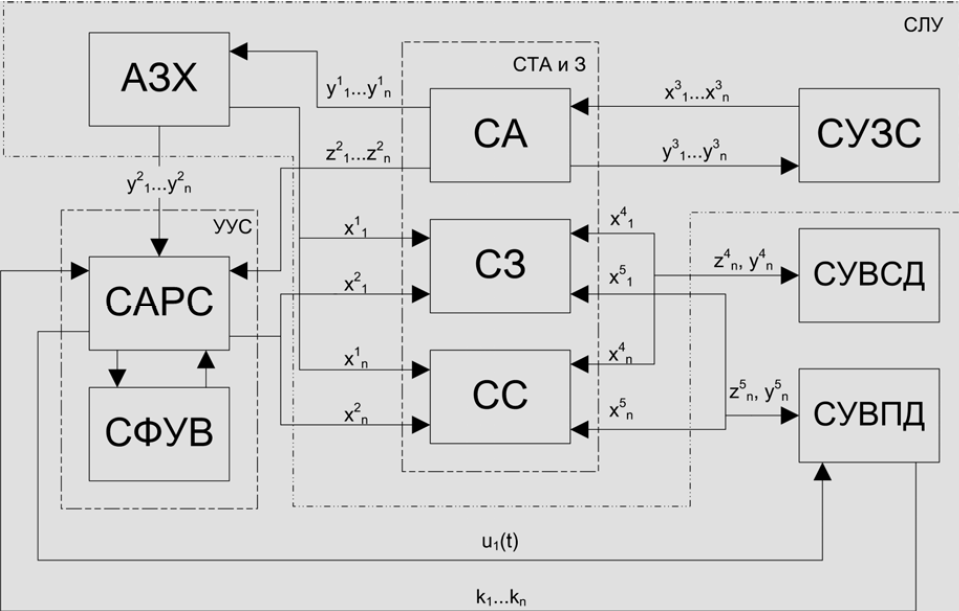
Рисунок 1 – Блок–схема системы управления электроприводом ШПУ
где Y1...Yn – множество дискретных выходных сигналов; X1...Xm – множество входных дискретных сигналов; Z1…Zl – множество дискретных сигналов, формируемых внутри системы; T1…Tk – временные задержки, присутствующие в системе.
Для работы со значениями непрерывных сигналов, такими как ток, скорость, напряжение, их значения должны быть приведены через пороговые переменные к определенным логическим внутренним переменным, на которые они воздействуют.
где I1...Ir — множество непрерывных входных сигналов, контроль за которыми должна осуществлять система; I1’...I’r — множество граничных значений параметров определяющих достижение непрерывным сигналом определенного значения. Основной недостаток данного метода в его недостаточной наглядности и сложности восприятия описания, при описании сложных систем [1].
В настоящее время для проектирования систем с преобладающим большинством логических сигналов получают методы теории автоматов и их отдельные приложения [2, 3, 4]. Наибольшее распространение получили автоматы Мили и Мура [5].
Для описания СЛУ ШПУ как системы обладающей свойствами автоматов обоих типов, бо?льшая часть выходных сигналов системы управления зависит только от состояния, часть же сигналов, формируется в момент изменения состояния, и зависит от входного сигнала, вызвавшего переход, целесообразно применять С–автомат, сочетающий в себе автоматы Мили и Мура. Тогда с учетом (1) и (2) С–автомат СЛУ определяется множеством, из восьми элементов:
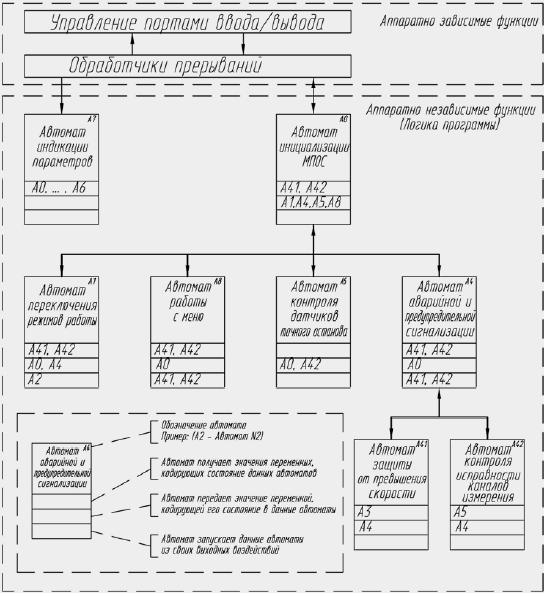
Рисунок 2 – Схема связи автоматов СЛУ
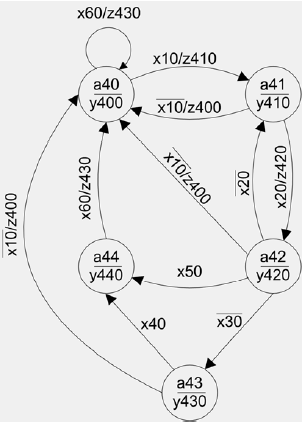
Рисунок 3 – Граф–схема автомата защиты и сигнализации
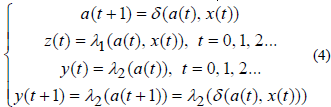
где X – множество входных сигналов, А – множество состояний автомата, Y – множество выходных сигналов зависимых только от состояния, Z – множество выходных сигналов, зависящих от входных сигналов, F — функция переходов автомата, F1 – функция выходов автомата, задающая отображение (A–X) – Y, F2 – функция выходов автомата, задающая отображение A – Y.
Закон функционирования С–автомата задается следующей системой уравнений:
Таким образом, математическую модель системы логического управления ШПУ можно представить в виде конечного автомата, с определенным набором состояний, входов и выходов, работающего в дискретном времени t = 0, 1, 2, 3, ...
Придерживаясь принципа декомпозиции, программа СЛУ разделяется на аппаратно зависимую часть, в которую входят обработчики прерываний, таймеры и функции, работающие с устройствами ввода вывода конкретного контроллера, и аппаратно независимую часть, реализующую логику работы программы. При этом, логика работы СЛУ представляется в виде совокупности конечных автоматов, каждый из которых состоит из простейших элементов (логических операций и элементов памяти), так чтобы каждой независимой функции, сопоставлялся отдельный автомат, оперирующий своими входными и выходными данными и действующий независимо [4].
Полученный граф функционирования автомата отражает правила перехода из одного состояния автомата в другое и формирование автоматом выходных воздействий, в зависимости от входной информации и текущего состояния автомата. Граф-схема алгоритма программы позволяет выбрать наиболее оптимальное построение логики программы и гарантирует однозначность программной реализации и логики автомата.
Таким образом, методику разработки СЛУ можно представить следующим образом: 1) описание системы логического управления, в виде математической модели, с использованием алгебры логики и теории автоматов (1, 3). Необходимо учитывать, что особенность СЛУ ШПУ в том, что математическое описание может содержать не только логические выражения, но и линейные и дифференциальные уравнения; 2) декомпозиция системы на отдельные автоматы, оперирующие своими входными и выходными данными и действующие независимо (5); 3) построение графов и таблиц переходов отдельных автоматов; 4) минимизация состояний графа переходов, удаление неиспользуемых и лишних состояний и переменных соответствующих им; 5) построение по минимизированному графу переходов, алгоритма программы; 6) разработка кода программы на выбранном языке программирования;. 7) тестирование и отладка программы.
Использование подобного подхода при разработке программного обеспечения позволяет добиться оптимального решения задачи построения СЛУ, что обеспечивает как надежность спроектированной системы, так и установки в целом и позволяет обеспечить соответствие разрабатываемых алгоритмов и программ, требованиям стандартов регламентирующих надежность, программного обеспечения, использующегося в системах управления опасными объектами.
Данный подход был использован при разработке устройства управления, контроля движения и технологических защит шахтной подъемной установки [6], данные устройства внедрены на ПУ Абаканского филиала ОАО «Евразруда», ОАО «Тыретский солерудник» и шахты «Березовская» УК «Угольная компания «Северный Кузбасс».
Список использованной литературы
1. Шалыто А. А. SWITCH–технология. Алгоритмизация и программирование задач логического управления. — СПб.: Наука. — 628 с.
2. Harel, David. Statecharts: A Visual Formalism for Complex Systems // Sci. Comput. Programming (8), 1987 р. 231 — 274.
3. Шалыто А. А. SWITCH–технология — автоматный подход к созданию программного обеспечения «реактивных» систем / Шалыто А. А., Туккель Н. И. // Программирование, 2001. №5. — с. 45–62.
4. Островлянчик В. Ю. Автоматический электропривод постоянного тока горно–металлургического производства: Учебное пособие. — Новокузнецк: 2004 г. — 383 с.
5. Глушков В. М. Синтез цифровых автоматов. — М.: Физматгиз. — 1962 г., 476с.
6. Патент Российской Федерации RU 2 314 990 C2 // Островлянчик В. Ю., Стексов А. М., Кубарев В. А. Опубликовано 20.01.2008 бюллетень №2.